高分七号卫星激光测高仪总体设计与在轨验证
2020-07-13 09:44国爱燕戴君赵晨光张新伟
航天器工程 2020年3期
国爱燕 戴君 赵晨光 张新伟
(北京空间飞行器总体设计部,北京 100094)
卫星激光测高具备主动获取全球地表及目标高程信息的能力,能为快速获取包括境外地区在内的高程控制点以及立体测图提供服务,同时在极地冰盖测量、植被高度及生物量估测、云高测量、海面高度测量以及全球气候监测等方面都可以发挥重要作用[1-3]。
从20世纪90年代开始,美国NASA陆续在火星、月球、以及水星等深空探测任务中使用激光测高仪进行地形测量,绘制高精度地图。2003年1月12日,NASA发射了冰、云和大陆高程探测的冰卫星(Icesat),搭载地球科学激光测高系统(Geoscience Laser Altimeter System,GLAS)。GLAS采用了高能量低重频大光斑激光、全波形测距技术和基于星敏感器的指向测量技术,用于监测全球冰盖高程及其变化,于2009年10月11日停止工作[4-6]。
2016年5月30日,我国在太原卫星发射中心成功发射了资源三号02星,搭载了国内首台对地观测的试验性激光测距仪,采用高能量激光器和阈值鉴别测距技术,开展在轨试验探索[7-8]。高分七号卫星于2019年11月3日发射,其上搭载了激光测高仪,用于广义稀疏控制点测量,对立体线阵测绘相机的地形数据进行高程误差修正,提高立体图像的高程精度,满足高分七号卫星在少控制点条件下实现1∶10 000立体测绘的应用需求。
本文论述激光测高仪的总体设计思路,重点对高速全波形测距、高稳定性激光指向测量和长寿命激光器的实现方案、地面和在轨验证情况进行分析。
1 激光测高仪总体设计
根据《GB/T 13990-92 1∶5000、1∶10 000地形图航空摄影测量业内规范》要求,制作1∶10 000比例尺地图,对影像的平面误差和高程精度要求见表1。

表1 1∶10 000比例尺地图制图需求Table 1 Requirements of 1∶10000-scale mapping m
根据上述需求,高分七号卫星研制总要求提出了定位精度的指标要求:无控制点情况下,1~2级标准产品平面定位精度≤20 m(1σ);有控制点情况下立体测绘产品精度平面精度≤5 m(1σ)、高程精度≤1.5 m(1σ)。
激光测高仪的设计指标为测距精度≤0.3 m,经在轨标定后,激光足印的高程精度≤1 m。在少量地面实测控制点或无控制点情况下,以激光足印为高程控制点,与测绘相机数据联合平差[9-10],可实现1∶10 000比例尺地图对影像的平面误差和高程精度的要求。
为满足使用要求,激光测高仪的总体设计思路为
1)采用高精度全波形测距体制
我国首次在星载对地测量应用中使用全波形测距体制激光测距,相对于传统的阈值鉴别体制,全波形能够反映探测区域内地表形状、地表粗糙度和反射率等地形、地物信息,通过对波形数据的分析、处理,可实现对距离的高精度统计。
2)配置足印相机,同时记录激光出射方向和地物影像
足印相机对激光出射方向进行精确的测量,确定激光指向地面的矢量方向。同时,足印相机还对地物进行成像,并通过与测绘相机的图像匹配,最终确定激光足印控制点在地面的位置。
3)2通道、3 Hz工作方式和8年长寿命设计
为了增加控制点的数量,设计了2个独立的收发通道,每个通道都包含激光发射、全波形接收和足印相机三个完整的部分,以3 Hz的频率工作,使激光足印和足印相机图像均匀分布在测绘相机图像中,如图1所示。其中,激光器采用国内首个长寿命空间全固态激光器,设计寿命8年。
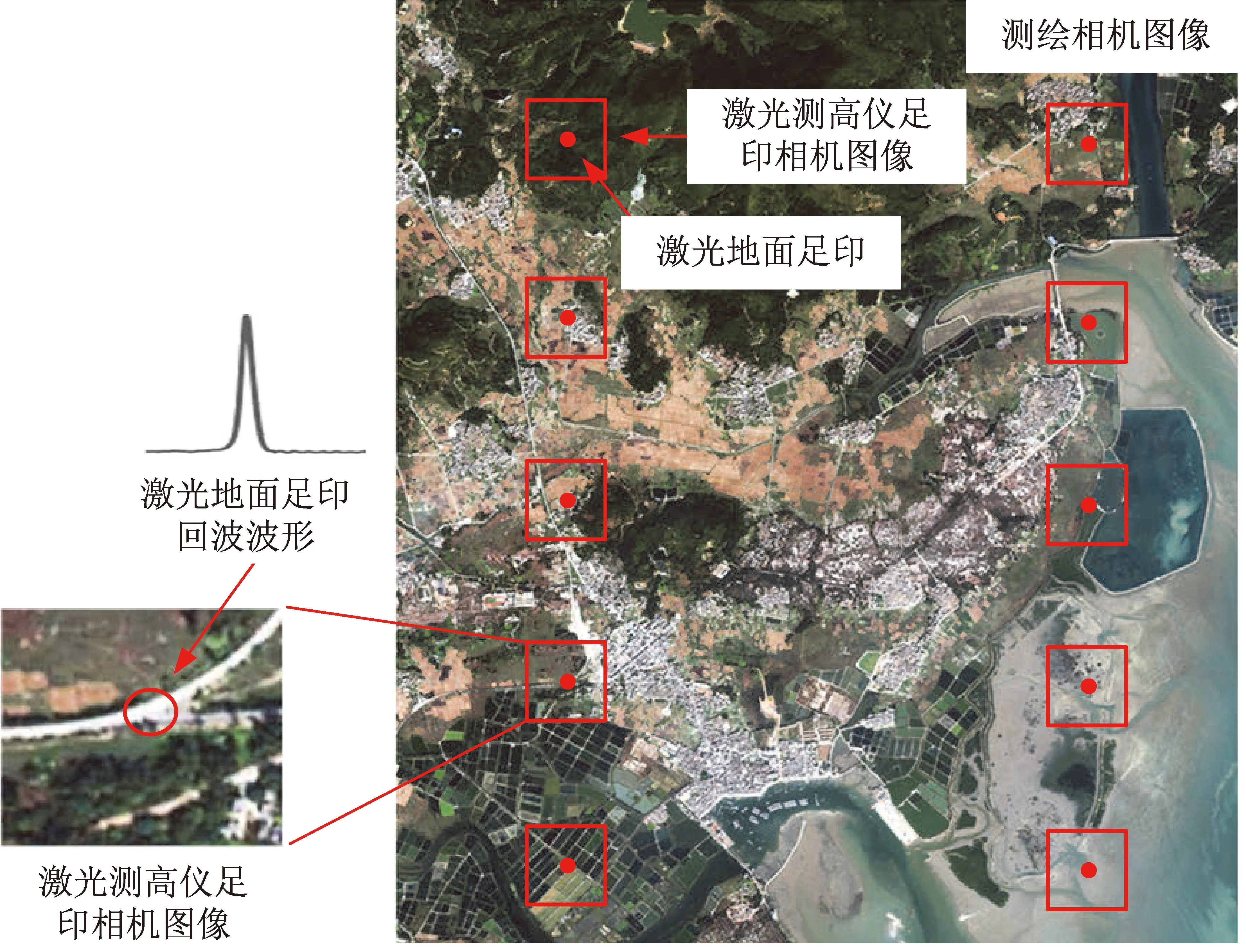
图1 激光足印地面控制点示意图Fig.1 Schematic diagram of laser footprint elevation control points
2 激光测高仪方案与地面验证
激光测高仪的组成结构如图2所示,发射通道为2个独立的激光器和发射镜头,接收通道共用接收望远镜,2个通道的激光回波通过接收望远镜后分别进入对应的全波形接收机和足印相机。

图2 激光测高仪组成结构图Fig.2 Structure diagram of the laser altimeter
激光测高仪主要技术指标如表2所示,激光能量可在100~180 mJ之间调整。激光测高仪的工作方式如图3所示,2个通道同时工作,夹角为1.4°。

表2 激光测高仪主要技术指标Table 2 Technical specifications of the laser altimeter
2.1 全波形测距方案设计与验证
测距过程中,取激光能量的极小部分送回接收望远镜作为主波(图4)。绝大部分激光能量打向地面,经地面反射后回到接收望远镜成为回波。主波和回波经过接收望远镜、后光路后汇聚到探测器,转变为电信号,经过滤波和放大后进入全波形采集模块。
全波形模块将主波/回波波形进行采样,采样频率为2 GHz,波形下传到地面,通过分别计算主波、回波高斯形心对应时刻得到激光发射时刻和激光接收时刻,二者之差就是激光往返飞行的时间,如图5所示。
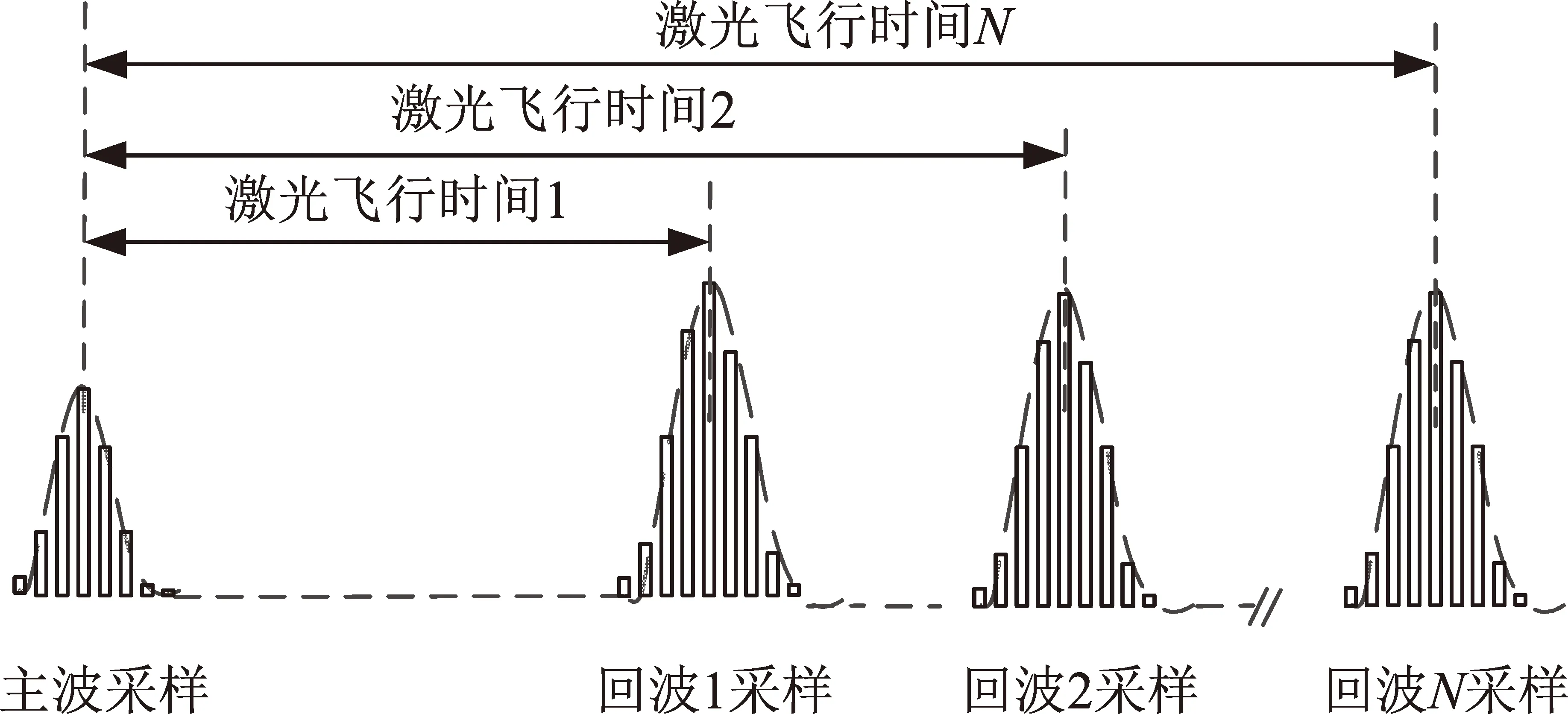
图5 激光飞行时间测量Fig.5 Measurement of laser flight time
为实现测距精度≤0.3 m的要求,对测距过程中的误差项进行了控制,并采用测试和仿真结合的方法,对在轨测距精度进行预估,结果如表3所示,激光测高仪测距精度的设计和测试指标为0.14 m,满足测距精度小于0.3 m的要求。

表3 激光测高仪测距随机误差分析Table 3 Root mean square(RMS) analysis of laser ranging m
2.2 激光指向测量方案的设计与验证
利用取光组件,将激光出射光路中的部分光引入足印相机视场,在足印相机视场中得到取样激光光斑。通过统计取样光斑质心的抖动,计算实际出射激光的方向抖动。根据标定的转换矩阵,将取样光斑质心转换为地面足印质心位置,利用足印相机地物特征和回波特征,对激光指向偏差进行修正。
在地面测试期间,对足印相机中取样光斑质心的抖动进行了持续的监视,如表4所示,质心抖动≤0.5像素,对应0.8 μrad,满足指标要求5 μrad。
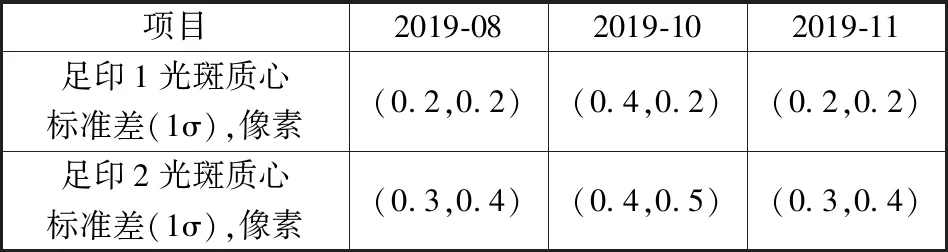
表4 地面测试足印相机取样光斑质心抖动情况Table 4 RMS ofcentroid of sampled laser spot in laser footprint camera
2.3 激光器的设计与验证
高分七号激光测高仪的技术指标对激光器提出了高能量和长寿命的要求,激光器采用振荡器+预放级+主放级的设计方案。采用两级放大,既能够保证激光能量满足要求,又可以有效地控制激光光束质量。
激光器飞行件实物如图6所示,为了确保激光器能量和寿命满足要求,在地面对上述指标进行了测试。

图6 激光器飞行件Fig.6 Flight model of laer emitters
激光能量测试结果如图7所示,测试时间为15 min,激光能量均值为181.8±1.7 mJ,满足指标要求。

图7 激光器能量测试结果Fig.7 Test result of laser energy
为满足8年寿命要求,激光器的脉冲次数需要达到1×108次。激光器在地面按20 Hz进行加速寿命试验。试验累计激光发射约3.2×108次,能量减少了约4.5%,满足预期要求,如图8所示。

图8 激光器寿命试验 Fig.8 Lifetime test of laser emitter
3 激光测高仪在轨验证
3.1 激光测距精度
激光测高仪回波波形中体现了地物的信息,通过分析波形可提取激光测距值,图9为典型的多回波波形,反映了高度差3.75 m的地物特征。
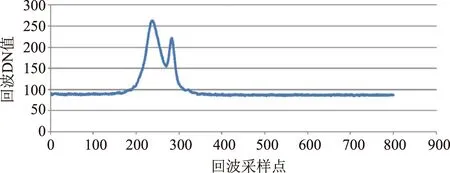
图9 激光测高仪在轨接收的回波波形Fig.9 Laser echo waveform received by on-orbit laser altimeter
在获得激光测距值ρ,地理坐标系下的激光出射点位置[X0Y0Z0]T以及地理坐标系下激光足印中心点的平面坐标值(Xz,Yz)之后,可以利用空间距离计算公式获得激光足印的高程值Zz和激光指向P。
(1)
利用平整湖面对激光测高仪的相对高程精度进行评估,根据咸海测量数据分析,相对高程精度为0.066 5 m(1σ),满足≤0.3 m要求。
3.2 激光指向测量精度
对足印相机中激光指向进行了统计,单次测量期间指向抖动标准差≤0.65 μrad,足印相机图像如图10所示,分别为北京大兴机场和城市地区,图像中激光光斑和激光地面足印之间的位置差异为系统差,为避免激光光斑遮挡地物特意进行的设计。
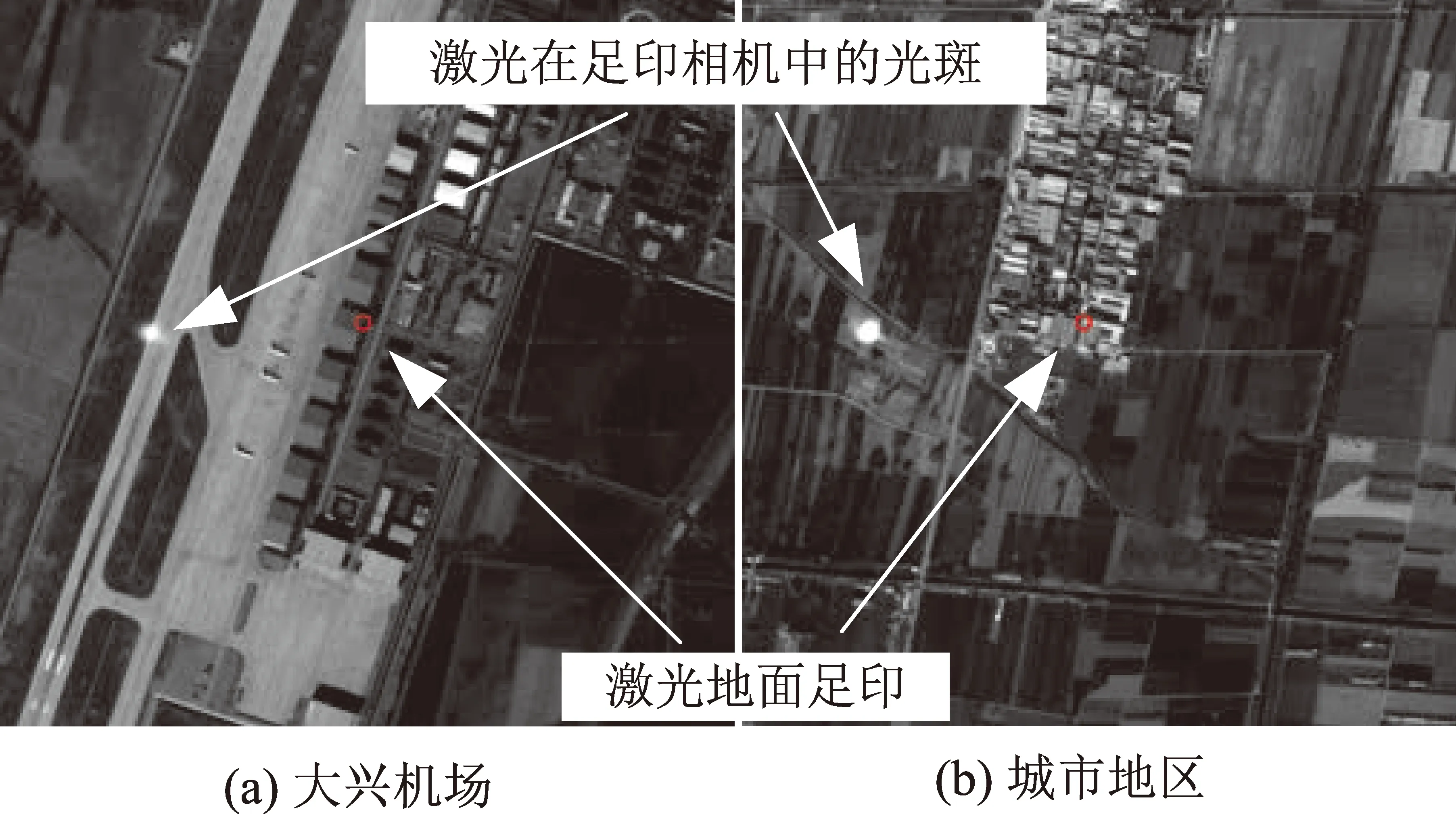
图10 足印相机图像Fig.10 Image of laser footprint camera
3.3 激光器能量
激光测高仪激光器设计能量为100~180 mJ可调,在轨使用能量为100 mJ。自2019年11月3日发射以来,截至2020年1月4日,激光器1累计出光次数407 251次,激光器2累计出光次数400 227次。以激光器2的遥测为例进行能量稳定性分析,结果如图11所示,单次测量能量抖动标准差小于1 mJ。

图11 激光器能量Fig.11 On-orbit laser energy telemetry
4 结束语
为满足1∶10 000比例尺制图的高程精度要求,高分七号卫星采用了激光测高仪和测绘相机结合的复合测绘体制。激光测高仪总体方案采用高精度全波形测距、高精度指向测量和8年长寿命激光器设计,工作方式为2通道、3 Hz频率。地面和在轨初期的测试表明:激光测高仪状态良好,测距精度≤0.3 m,满足设计要求。
猜你喜欢
制造业自动化(2022年9期)2022-10-03
导航定位学报(2022年4期)2022-08-15
全球定位系统(2022年1期)2022-04-14
科技信息·学术版(2022年3期)2022-02-21
航天返回与遥感(2021年6期)2022-01-11
全球定位系统(2021年1期)2021-03-26
思维与智慧·下半月(2021年3期)2021-03-25
微型计算机·Geek(2009年3期)2009-12-11