无人机多光谱遥感反演各生育期玉米根域土壤含水率
2020-07-10 04:06谭丞轩张智韬许崇豪姚志华魏广飞
农业工程学报 2020年10期
谭丞轩,张智韬,许崇豪,马 宇,姚志华,魏广飞,李 宇
·农业航空工程·
无人机多光谱遥感反演各生育期玉米根域土壤含水率
谭丞轩1,2,张智韬1,2※,许崇豪1,马 宇1,姚志华1,魏广飞1,李 宇1
(1. 西北农林科技大学水利与建筑工程学院,杨凌 712100;2. 西北农林科技大学旱区农业水土工程教育部重点实验室,杨凌 712100)
为准确及时地获取植被覆盖条件下农田土壤水分信息,该文以不同水分处理的大田玉米为研究对象,利用无人机遥感平台对夏玉米进行多期遥感监测,并同步采集玉米根域不同深度土壤含水率(Soil Water Content,SWC)。基于2018年夏玉米拔节期、抽雄-吐丝期和乳熟-成熟期的无人机多光谱遥感影像数据集,通过支持向量机(Support Vector Machine,SVM)分类剔除土壤背景,提取玉米冠层光谱反射率并计算10种植被指数(Vegetation Index,VI),然后利用全子集筛选(Full Subset Selection)法对不同波段和植被指数进行不同深度土壤含水率的敏感性分析,并分别采用岭回归(Ridge Regression,RR)和极限学习机(Extreme Learning Machine,ELM)2种方法构建全子集筛选后0~20、20~45和45~60 cm不同深度下的土壤含水率定量估算模型。结果表明:基于贝叶斯信息准则(Bayesian Information Criterion,BIC)的全子集筛选法可以有效筛选最优光谱子集,筛选变量基本都通过了显著性检验,自变量个数较少;在同一生育期、同一深度条件下,ELM模型效果均优于RR模型;玉米在拔节期、抽雄-吐丝期的最佳监测深度为0~20 cm,在乳熟-成熟期的最佳监测深度为20~45 cm;乳熟-成熟期的20~45 cm深度下的ELM反演模型效果最优,其建模集和验证集的决定系数R2和R2分别为0.825和0.750,均方根误差RMSE和RMSE分别为1.00%和1.32%,标准均方根误差NRMSE和NRMSE分别为10.85%和13.55%。利用全子集筛选法与机器学习相结合的方法可以提高土壤含水率的反演精度和鲁棒性,本研究为快速、准确地监测农田土壤墒情、实施精准灌溉提供了一种新的途径。
土壤含水率;遥感;模型;全子集;机器学习;反演
0 引 言
土壤含水率是陆地表面与大气之间能量平衡和水文循环的关键参数,也是制约干旱、半干旱地区作物生长发育的重要因素[1]。及时准确的获取土壤含水率状况,是监测作物长势、指导灌溉决策和实现精准农业的基础和关键。而遥感技术以其高效性和精准性等优势在土壤含水率监测中具有广泛的应用前景[2-5]。
近几年无人机多光谱遥感系统,以其成本低、获取便捷、高时效性和高时空分辨率等优势,在监测农田作物水分胁迫方面有很大进展[6]。Baluja等[7]研究表明归一化植被指数(Normalized Difference Vegetation Index,NDVI)、叶绿素吸收反射转化指数与优化土壤调节指数的比值(Ratio between Transformed Chlorophyll Absorption in Reflectance and Optimized Soil Adjusted Vegetation Index,TCARI/OSAVI)与茎水势(Stem Water Potential,SWP)、叶水势(Leaf Water Potential,LWP)具有很好的相关性(2分别为0.86和0.84);Romero M等[8]建立了NDVI、土壤调节植被指数(Optimal Soil Adjusted Vegetation Index,OSAVI)等10种植被指数与茎水势的人工神经网络模型,模型的预测决定系数2为0.83,且通过了0.001极显著水平检验;Zhang[9]基于无人机多光谱传感器构建了植被指数(Vegetation Index,VI)—水分胁迫指数(Crop Water Stress Index,CWSI)回归模型,证明了高分辨率无人机多光谱遥感在玉米水分胁迫研究中的潜力与优势;陈俊英等[10]基于无人机多光谱数据,构建了水分胁迫指标—蒸腾速率(T)和气孔导度(G)的光谱反演模型,取得了较好的效果。然而以往大多是基于水分胁迫状况的研究,而利用无人机多光谱遥感直接进行土壤含水率的反演监测的相关研究还鲜有报道。当光照、气温等环境因素变化不大时,植被冠层光谱主要受不同水分胁迫状况的影响,因而根据植被的光谱信息建立的多种植被指数,不仅可以诊断不同水平的水分胁迫状况,还可以对土壤含水率进行定量估算,它更为直接地体现了土壤含水率的监测精度[1,11]。张智韬等[12]基于无人机多光谱影像,构建了玉米全生育期的土壤含水率反演模型。然而该研究并未剔除土壤背景,也未探究不同生育期下的最佳监测土壤深度。而作物在不同生育期的主要根系及根系活动层深度并不相同,且原始多光谱影像包含作物冠层和土壤2种因素,剔除土壤背景是获取准确的冠层光谱信息的关键,因此剔除土壤背景和研究作物在不同生育期下的最佳监测深度的土壤含水率模型具有重要意义。
此外,不同冠层光谱反射率和植被指数之间差异较大,还存在较强的共线性问题,因而筛选敏感光谱指数对土壤含水率监测具有重要意义。传统变量筛选方法[13-14]均为局部最优筛选,而全子集筛选法列举全部可能存在方式,最终建立全局最优模型[15]。岭回归(Ridge Regression,RR)作为一种改进的最小二乘法,不仅在处理病态数据和提取特征信息方面有较好的效果,还可以实现模型的简化和鲁棒性的提高[13,16]。土壤含水率与植被光谱之间关系复杂,经典回归方法难以做到无偏、有效的参数估计。机器学习方法在解决非线性、异方差等繁杂关系问题有较大优势,是农业遥感领域建模反演研究的热点[4,8,12,17]。极限学习机(Extreme Learning Machine,ELM)是一种基于前馈神经网络的机器学习算法,学习效率高、参数调整简单以及较高的模型鲁棒性等[17]。但基于全子集法筛选最优光谱指数组合,构建岭回归和极限学习机土壤含水率反演模型的相关研究还未见报道。
本文以内蒙古达拉特旗试验站的大田玉米为研究对象,基于高分辨率的无人机多光谱影像数据,利用支持向量机(Support Vector Machine,SVM)方法剔除土壤背景,以获取玉米冠层光谱反射率,建立多种植被指数,然后将全子集筛选法得到的最优变量组合作为自变量,分别构建大田玉米在不同生育期、不同土壤深度下的岭回归和极限学习机模型,以期获得大田玉米在不同生育期下的最佳监测深度的土壤含水率反演模型,并为干旱地区的灌溉管理提供科学参考。
1 材料与方法
1.1 试验区概况
本文试验区域位于内蒙古自治区达拉特旗昭君镇(40°26'0.29" N,109°36'25.99" E),海拔1 010 m,属于典型温带大陆性气候,干旱少雨,冬寒夏热,小麦和玉米为当地的主要粮食作物。试验地土壤为砂壤土(80.7%的砂粒,13.7%的粉粒,5.6%的黏粒),土壤的pH值、有机质含量、有机碳含量分别为9.27,47.17和27.35 g/kg,平均田间持水率为18.5%(体积含水率,下同),土壤容重为1.56 g/cm3。玉米播种时间为2018年5月11号,出苗时间为5月18号,收获时间为2018年9月8号,生育期总共114 d。玉米播种深度约5 cm,种植株距和行距分别为25和50 cm,行向从东到西,利用中心轴式喷灌机进行生育期内的供水补给。
1.2 试验设计
整个圆形试验区面积约为1.13 hm2,将其均分为5个扇形小区,每个扇形试验小区设置3个6 m×6 m的采样区,每个采样区按对角线设置A、B、C 共3个数据采样点。5个扇形小区分别采用不同的灌溉水分处理(Treatment,TRT),区域TRT1进行全生育期的充分灌溉(田间持水率的95%),区域TRT4进行严重水分胁迫处理(田间持水率的40%),区域TRT2、区域TRT3、区域TRT5水分处理差异较小,水分胁迫处理分别设置为80%、70%和60%的田间持水率。灌溉量和降雨量分别通过安装在喷灌机上的流量计(MIK-2000H型)和标准气象站采集。在每个小区的中心位置埋设小型气象站以记录空气温湿度、风速等信息;在小型气象站附近(TRT2-TRT5)以及喷灌机轴心位置(圆形试验区的圆心位置)设有实时动态定位(Real Time Kinematic,RTK)技术测定的地理位置几何控制板,以用于图像拼接的几何校正。研究区域位置、试验小区划分及采样点分布如图1所示。
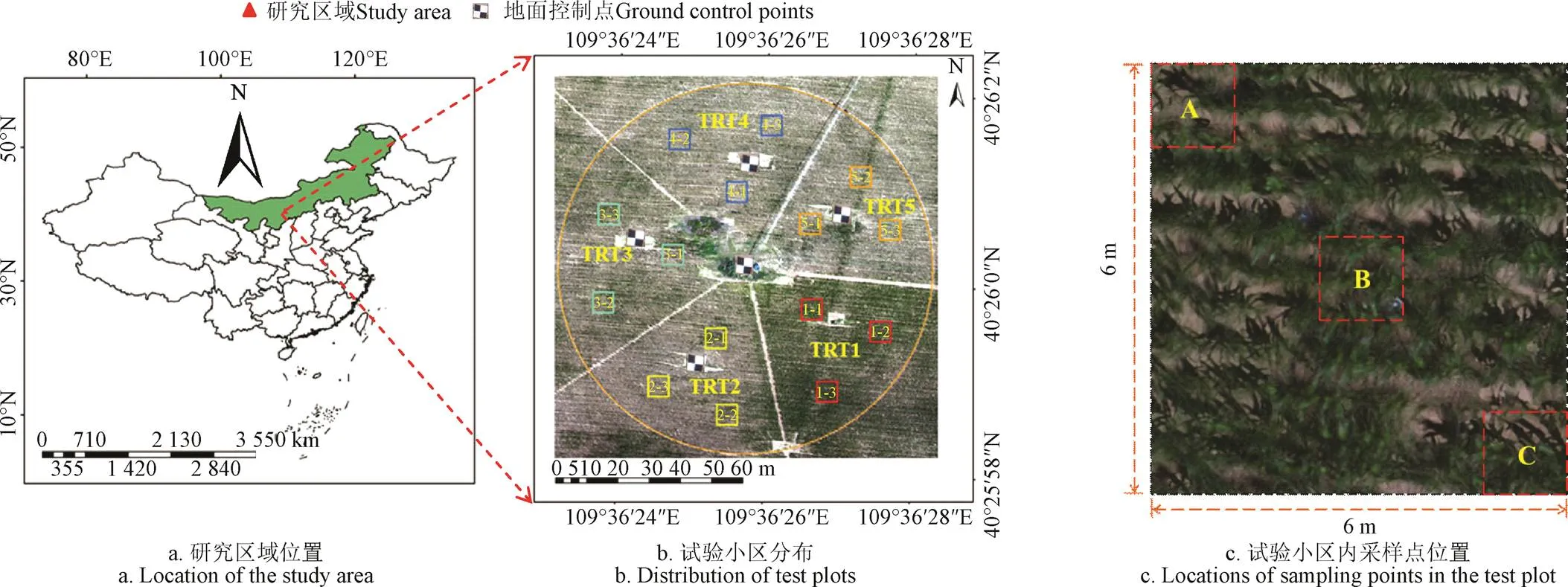
注:TRTg(g=1, 2, 3, 4, 5)表示第g个扇形试验小区;h-i(h=1, 2, 3, 4, 5; i=1, 2, 3)表示第h个试验小区内的第i个采样点;A、B、C表示各试验小区的采样点位置。
1.3 试验数据的获取
本试验无人机多光谱遥感影像以及地面数据采集日期为2018年7月8日、7月12日、7月17日、7月21日、7月26日、8月2日、8月28日和9月7日。每天采集1次,全生育期共采集8次。7月8日-7月21日为玉米拔节期,7月26日-8月2日为玉米抽雄-吐丝期,8月28日-9月7日为玉米乳熟-成熟期。
1.3.1 无人机多光谱遥感系统
试验利用自主研发的六旋翼无人机作为遥感平台,最大载重5 kg,续航时间30 min左右,采用开源飞控Pixhawk系统,搭载1280像素×960像素的五波段RedEdge(Micasense,USA)多光谱相机(使用前进行去噪、镜头畸变校正等处理),相机质量为150 g,焦距为5.5 mm,视场角为47.2°,同时配有光强传感器和漫反射板(反射率58%,尺寸3 m×3 m,GroupVIII,USA),光强传感器校正航拍过程中外界光线对多光谱影像造成的影响,漫反射板对多光谱影像进行辐射校正,以生成反射率正射影像图。试验中无人机飞行高度70 m,航向和旁向重叠度均为85%,地面分辨率为4.77 cm/像素。试验期间晴朗无风,无人机飞行时间为当地时间11:00-13:00(北京时间11:44-13:44),多光谱相机镜头垂直向下,每次均按照固定航线进行拍摄。漫反射板中心波长反射率如表1所示。
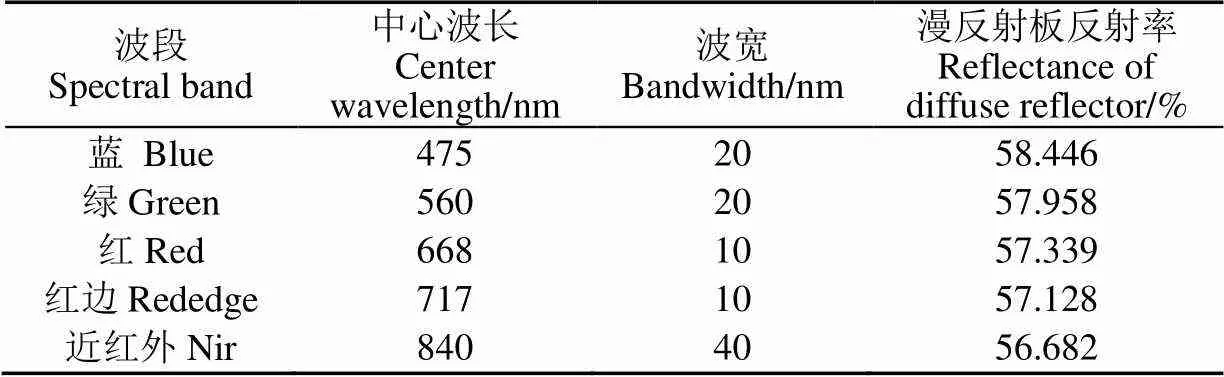
表1 漫反射板中心波长及反射率
1.3.2 土壤含水率测定
无人机影像采集完成后,及时在每个试验小区的A、B、C采样点附近利用土钻取土烘干法进行玉米根域土壤含水率的测定,根据玉米主要根系活动层所在深度,A、B、C三个采样点按照0~20、20~40和45~60 cm分层取样,土样取出后迅速装入铝盒进行称量,在干燥箱105 ℃下干燥后再称量并计算得到土壤质量含水率,根据土壤容重最终得到土壤体积含水率。将A、B、C三个采样点的土壤含水率取平均值,代表6 m×6 m采样区不同深度土壤含水率的均值。拔节期、抽雄-吐丝期、乳熟-成熟期样本数量分别为60、30和30,并通过SPXY算法(Sample Set Partitioning Based on Joint-Distance)对建模集和验证集进行筛选,其中2/3数据用于建模,1/3数据用于验证,图2为土壤含水率(Soil Water Content,SWC)样本数据统计结果。
由图2可以看出,在不同生育期和不同深度条件下,利用SPXY算法划分的建模集和验证集均保持了和全集SWC相近的统计结果,如最大值、最小值以及中位数等,最大限度减小了建模集和验证集之间存在的偏差。
1.4 多光谱图像处理
1.4.1 图像拼接
为得到完整的试验区影像,采用Pix4dMapper软件进行多光谱图像的拼接。首先利用漫反射板进行多光谱图像的辐射校正,以生成准确的作物反射率信息;为确保图像中地理坐标与真实地理坐标信息相一致,进行拼接图像的几何校正,将5个地面控制点的矢量文件和5个几何控制板手动配准;最后利用ENVI软件的波段合成(Layer Stacking)功能,将5张单波段反射率图像合并成一张包含5波段反射率的图像,以方便后期图像处理和提取各样区的反射率信息。
1.4.2 剔除土壤背景影响
本文利用NIR、R、B3波段合成的假彩色图像来进行SVM分类,利用ArcGIS软件来对SVM分类结果进行二值化等处理后,最终得到玉米冠层矢量文件,最后利用ENVI软件来获取玉米冠层的掩膜文件,叠加到原始5波段图像中并进行数据统计,可以得出该采样方的不同波段反射率的最大值、最小值和平均值等信息,不同波段反射率的平均值分别代表该采样方剔除土壤背景影响的玉米冠层的不同波段反射率。玉米冠层反射率的提取过程及效果如图3所受,SVM的分类精度与Kappa系数如表2所示。
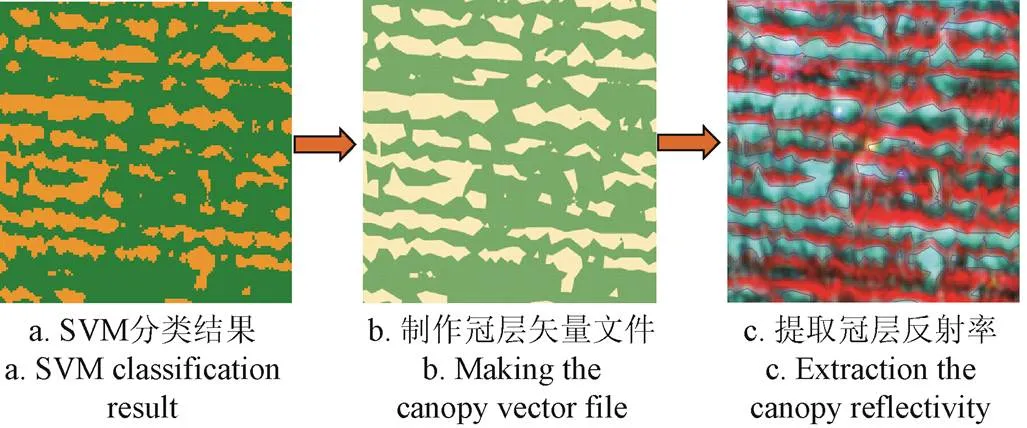
图3 玉米冠层反射率提取流程及效果
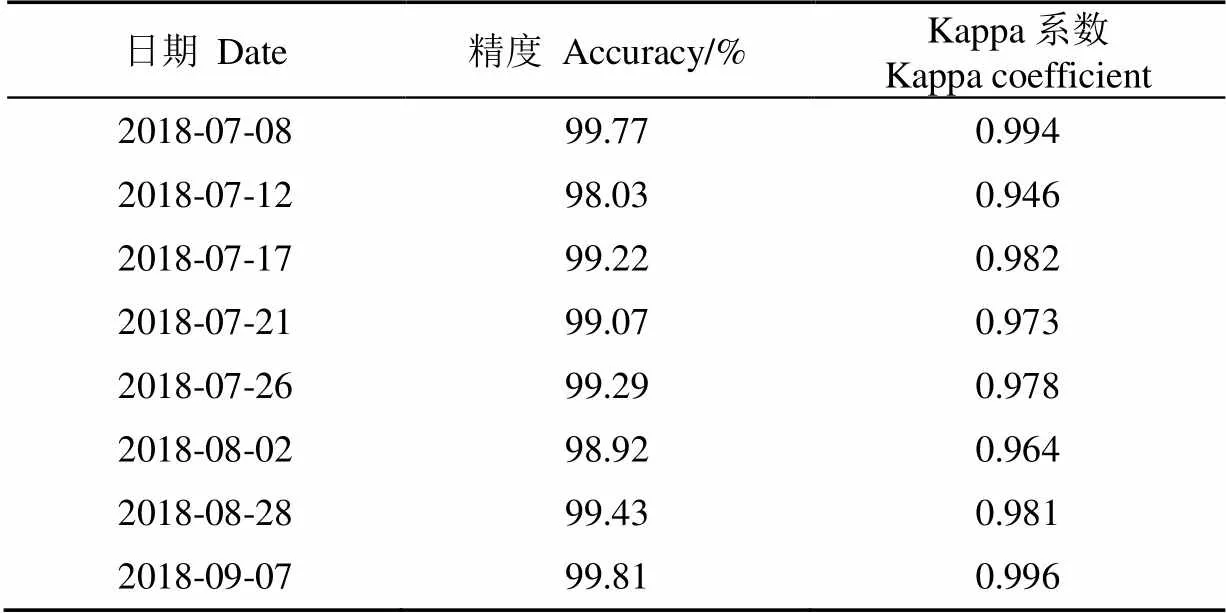
表2 研究期间的SVM分类精度与Kappa系数
1.4.3 植被指数的计算
植被指数本质上综合考虑了健康绿色植物在不同波段的反射和吸收特性,把多波段反射率做一定的数学变换,以增强作物植被信息[18]。本文依据提取的剔除土壤背景影响的玉米冠层反射率,计算10种常用的植被指数。植被指数及其计算公式如表3所示。
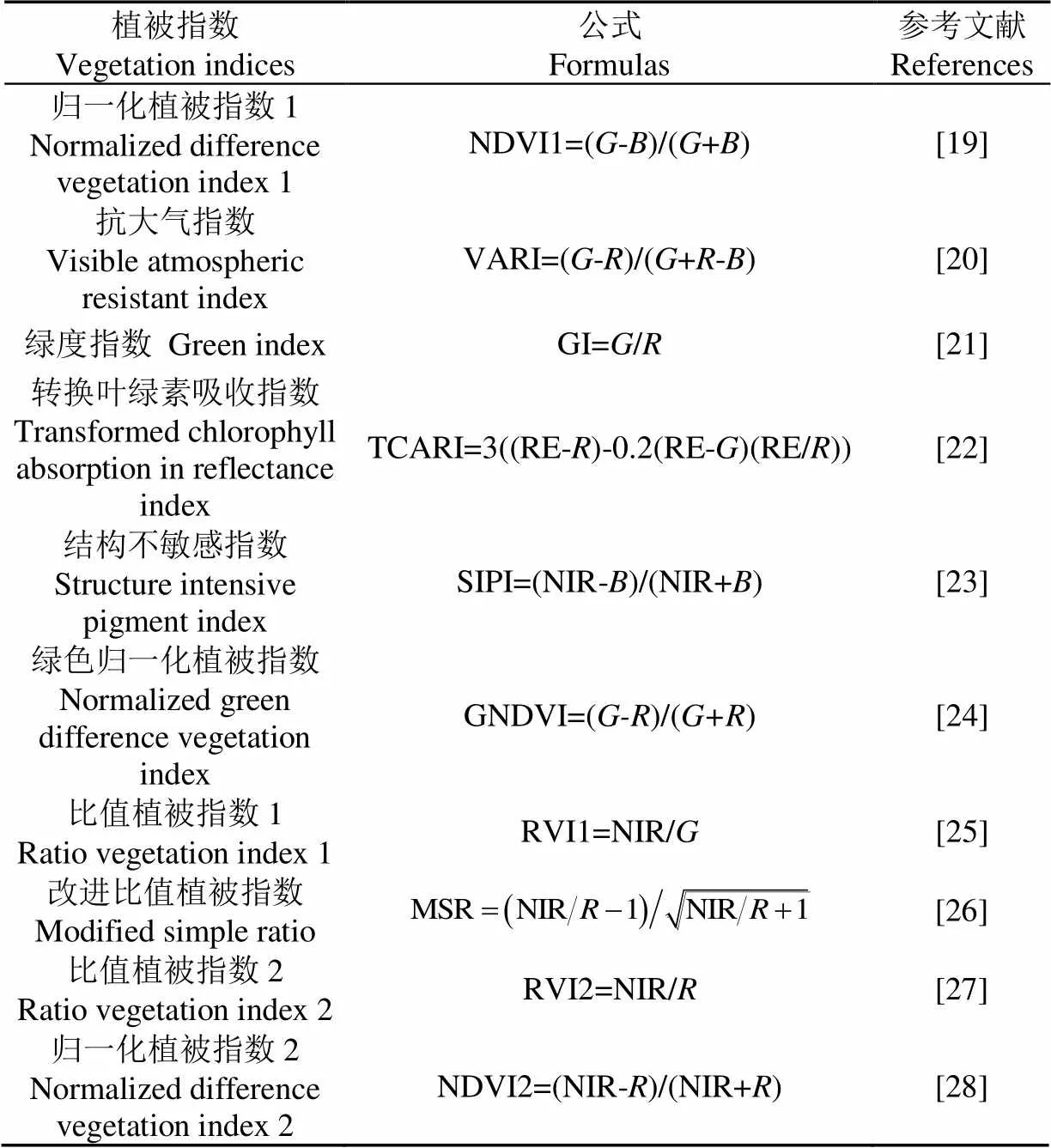
表3 植被指数及其计算公式
注:、、、RE和NIR分别为RedEdge多光谱相机475、560、668、717和840 nm波长处的光谱反射率。
Note:,,, RE and NIR are the spectral reflectance of RedEdge multispectral camera at wavelengths of 475, 560, 668, 717 and 840 nm, respectively.
1.5 全子集筛选法
全子集筛选法是基于不同自变量之间所有可能的组合方式,通过最小二乘法对筛选后的变量组合进行拟合与建模分析,最终选择一个最佳的监测模型。在选择最优模型时,应考虑以下2个方面:1)似然函数最大化;2)模型未知参数最小化,即寻求模型拟合精度和模型复杂度之间的最佳平衡。贝叶斯信息准则(Bayesian Information Criterion,BIC)与赤池信息准则(Akaike Information Criterion,AIC)相似,但是BIC惩罚项比AIC更大,可有效避免模型精度过高造成的模型复杂度过高的问题,在维数过大且样本数量相对较少的情况下,也可以有效避免维度灾难问题的出现[29]。因此本文主要利用BIC值最小的原则进行模型变量的筛选,通过R3.5.1软件的leaps包完成全子集筛选,BIC的计算公式为
BIC=ln−2ln(1)
式中为模型参数个数,为样本数量,为似然函数。
1.6 模型建立
本文利用R3.5.1软件的ridge包和elmNNRcpp包分别进行岭回归分析和ELM回归分析。岭回归分析是一种针对共线性数据分析的有偏估计回归方法,本质上是一种改良的最小二乘法,通过损失部分信息和降低精度来获得更为接近实际的回归模型,对病态数据具有较强的耐受性[13,16]。ridge包自动选择模型最优的岭参数,避免了人为对岭参数的调参选择,具有简单高效的优点。极限学习机是一种单隐层前向传播的人工神经网络模型训练算法,在模型训练过程中不需要调整输入层和隐含层的连接权值、隐含层阈值等参数,只需要设置网络的隐藏节点个数,并且具有全局最优解,因此ELM在保持学习精度的同时,还具有更快的学习速度和泛化性能好等优势[30-31]。
1.7 统计分析
本文主要利用贝叶斯信息准则和调整决定系数(Adjust Coefficient of Determination,R2)对全子集筛选效果进行评价。通过决定系数(Coefficient of Determination,2)、均方根误差(Root Mean Square Error,RMSE)以及标准均方根误差(Normalized Root Mean Square Error,NRMSE)综合评价土壤含水率反演模型的精度。2越近于1,说明反演模型的拟合效果越好;RMSE和NRMSE越接近于0,表明模型预测值和实测值的一致性较好,反演模型精度越高,效果越优。
2 结果与分析
2.1 冠层光谱反射率的变化
分别对5个处理小区的3个采样点的光谱数据取平均值,绘制不同生育期的玉米冠层光谱变化曲线,结果如图4所示。
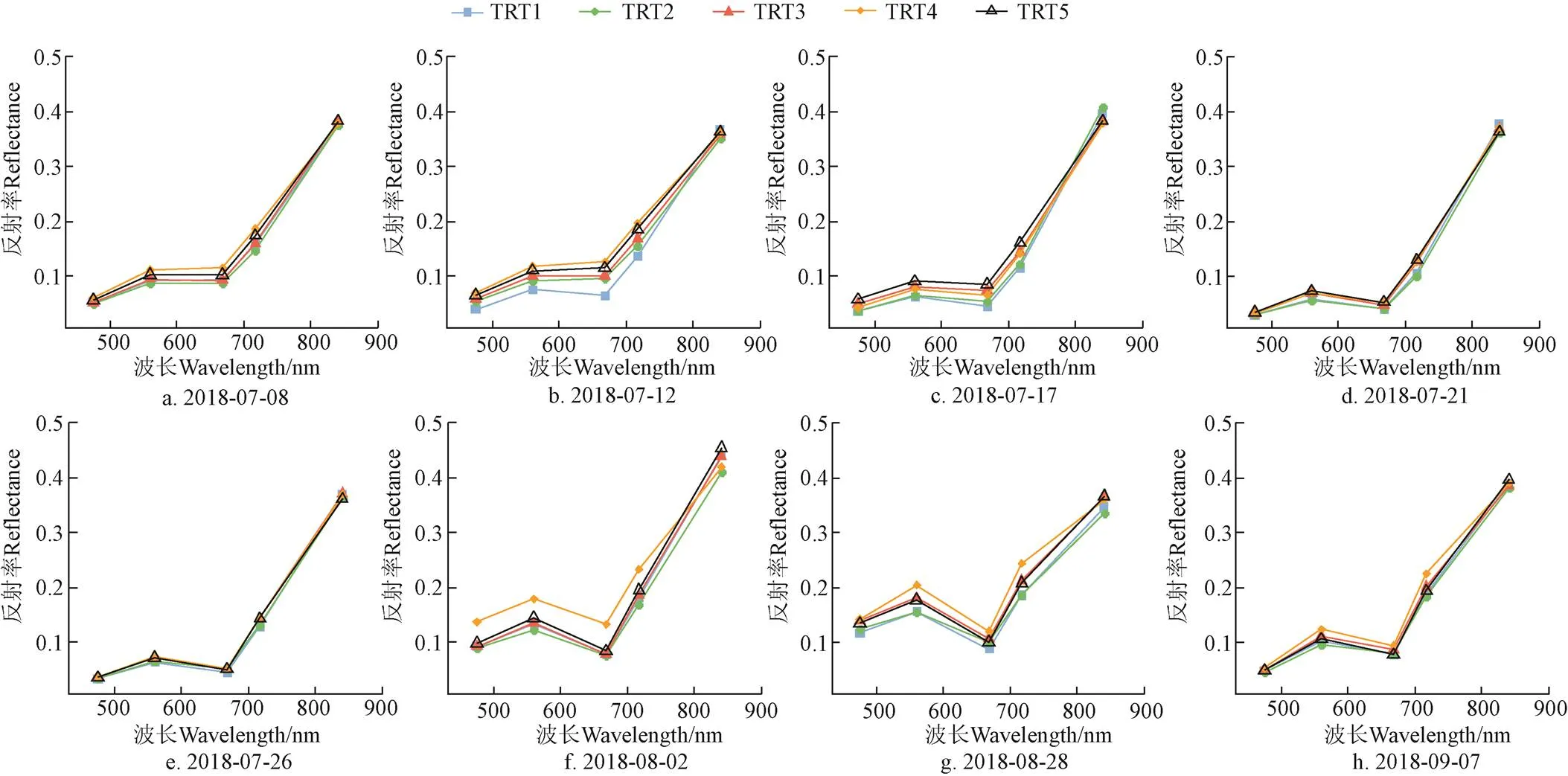
图4 不同处理小区不同生育期的玉米冠层光谱反射率
从图4可以看出,5个处理小区不同生育期的玉米冠层光谱反射率全部呈现出“先增后降再上升”的趋势,在绿光波段(560 nm)和红光波段(668 nm)分别形成波峰和波谷,即“绿峰红谷”,而在红边波段(717 nm)和近红外波段(840 nm)具有较高的反射率。蓝光波段和红光波段是植物叶绿素的显著吸收波段,对540 nm附近吸收较少故形成绿色反射峰;而近红外光谱区,绿色植物叶片的细胞壁和细胞空隙间折射率不同,引起多重反射而造成了高反射率[11,32]。
同一生育期内,在可见光波段和近红外波段,TRT1的光谱反射率几乎均为5个处理中的最小值,TRT4几乎均为最大值,其余处理处于二者之间,且差异不大。在2018-07-21和2018-07-26日,由于降雨较多,导致各试验小区水分差异较小,故各处理的玉米冠层光谱曲线近乎重合。在2018-08-02和2018-08-28日,由于天气晴朗,各试验小区只有灌溉水一个影响因素,各处理之间水分差异较大,因此玉米冠层光谱曲线的差异明显。
2.2 全子集筛选最佳光谱组合
基于贝叶斯信息准则(Bayesian Information Criterion,BIC)最小的原则,利用全子集筛选法选取出在不同生育期、不同深度条件下的最佳光谱组合,结果如表4和图5所示。其中乳熟-成熟期的45~60 cm,筛选变量仅为VARI时BIC值达到最小,但是考虑到后期岭回归和极限学习机模型的构建(自变量数>1),最后选择BIC值仅次于1个变量情况的5个变量组合结果(Blue、Green、NDVIg-b、TCARI、SIPI)。
从表4可以看出,在同一生育期,除了抽雄-吐丝期20~45和45~60 cm变量组合相同,其余不同深度土壤含水率的最优变量组合并不相同;在同一土壤深度的条件下,不同生育期的最优变量组合也不相同。拔节期效果最优的土壤深度是0~20 cm,其BIC值最小为−68,R2最大为0.74,20~45 cm的BIC值和R2都优于45~60 cm,因为玉米处于拔节期,此时根系较浅,主要获取浅层的土壤水分,故0~20 cm的R2较大。随着生育期的推移,当玉米处于乳熟-成熟期时,此时20~45 cm的BIC值最小仅为−37,R2达到了0.78,明显优于0~20 cm,且选取的植被指数或波段都为极显著相关(<0.001),因为玉米此时生长茂盛,主要根系分布较深[12],但是45~60 cm土层较深,水分利用率相对较低,故乳熟-成熟期20~45 cm的R2较大,BIC值较小。利用全子集筛选不同生育期、不同深度条件下的植被指数或波段基本都通过了显著性检验,部分变量甚至达到了0.001极显著水平,R2在0.47~0.78之间,表明基于BIC进行最佳光谱组合的筛选具有一定的应用潜力。
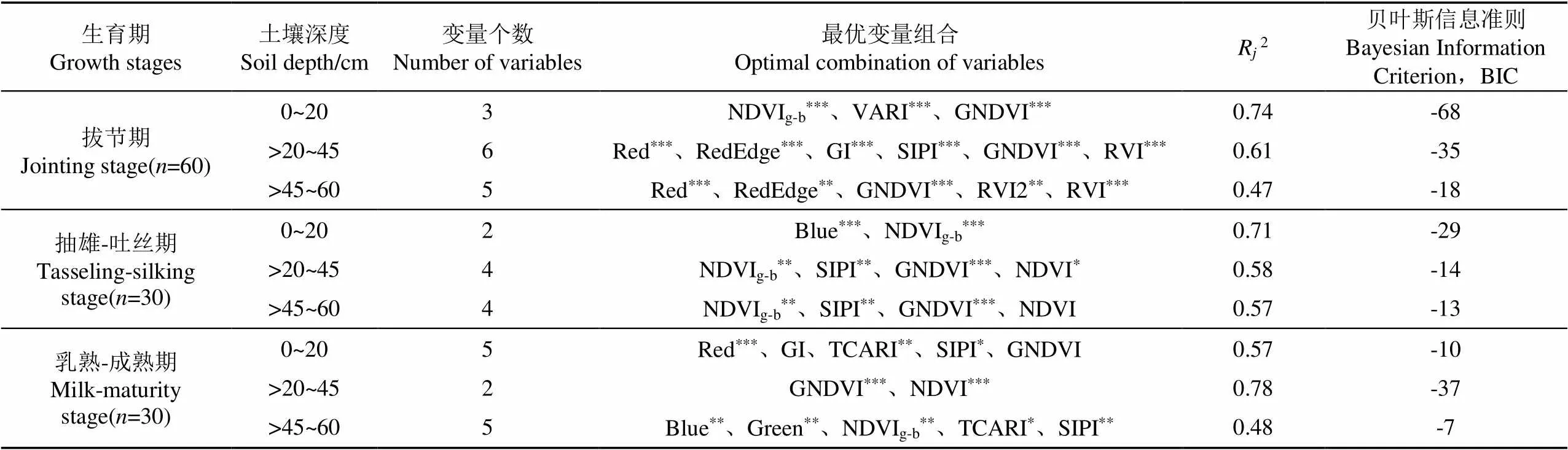
表4 全子集筛选结果统计
注:“*”表示在0.05水平显著;“**”表示在0.01水平显著;“***”表示在0.001水平显著;为样本数量;BIC为贝叶斯信息准则值。下同。
Note: “*” means significant at 0.05 level; “**” means significant at 0.01 level; “***” means significant at 0.001 level;represent the number of samples. BIC is the bayesian information criterion value. The same below.

图5 基于BIC的变量优选曲线
2.3 岭回归模型构建
分别以不同生育期、不同深度土壤含水率条件下筛选出的反射率及植被指数为自变量,土壤含水率为因变量建立岭回归模型。各模型的岭参数为4.04×10-5,2.30×10-4,1.37×10-4,9.05×10-3,1.25×10-4,2.70×10-5,7.61×10-4,3.30×10-2,1.21×10-4,土壤含水率的岭回归模型效果如表5所示。
从表5可以看出,岭回归模型的建模和验证效果比较接近,说明岭回归模型具有一定的稳定性。当玉米处于拔节期,0~20 cm的建模集决定系数2为0.785,RMSE仅为1.48%,NRMSE为15.83%,属于较小差异,均为拔节期建模集的最优效果,验证集决定系数2为0.711为验证集的最大值,但是0~20 cm的RMSE和NRMSE和分别为1.91%和19.43%,稍大于20~45 cm的RMSE(1.63%)和NRMSE(15.25%),说明浅层0~20 cm效果虽好,但是稳定性相对稍差。总体而言,0~20 cm为拔节期的最佳监测土壤深度,20~45 cm次之,45~60 cm相对较差。
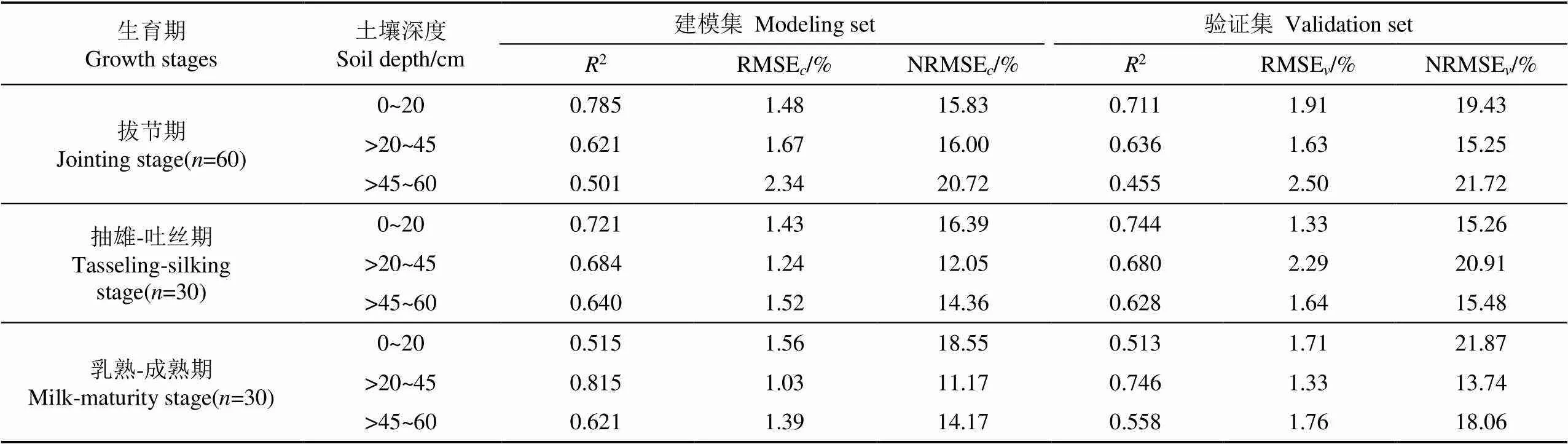
表5 不同生育期、不同深度土壤含水率的岭回归模型反演结果评价
当玉米处于抽雄-吐丝期,总体来看,0~20 cm为此时的最佳监测深度。其建模集和验证集决定系数2分别为0.721和0.744,均为该生育期的最大值,NRMSE和NRMSE分别为16.39%和15.26%,属于较小的模型差异。但是此时20~45和45~60 cm深度的模型效果与0~20 cm差距较小,其建模集和验证集决定系数均在0.628以上,建模集和验证集评价指标RMSE和NRMSE甚至优于0~20 cm。而当玉米处于乳熟-成熟期,20~45 cm为此生育期的最佳监测深度,45~60 cm次之,0~20 cm的效果最差。20~45和45~60 cm的建模集和验证集决定系数均高于0~20 cm,建模集和验证集的NRMSE均小于20%,属于较小模型差异。
2.4 极限学习机模型构建
极限学习机模型有隐藏神经元个数(Nhid)和激活函数(Actfun)两个重要参数。拔节期0~20、20~45和45~60 cm模型最终选定的参数分别为{(18, Tribas)、(15, Sin)、(11, Sin)}。抽雄-吐丝期0~20、20~45和45~60 cm模型最终选定的参数为{(7, Tansig)、(10, Sin)、(10, Tribas)}。乳熟-成熟期0~20、20~45和45~60 cm模型最终选定的参数为{(10, Sig)、(8, Radbas)、(12, Sin)}。不同生育期、不同深度土壤含水率的极限学习机模型在建模集和验证集的预测结果如表6所示。
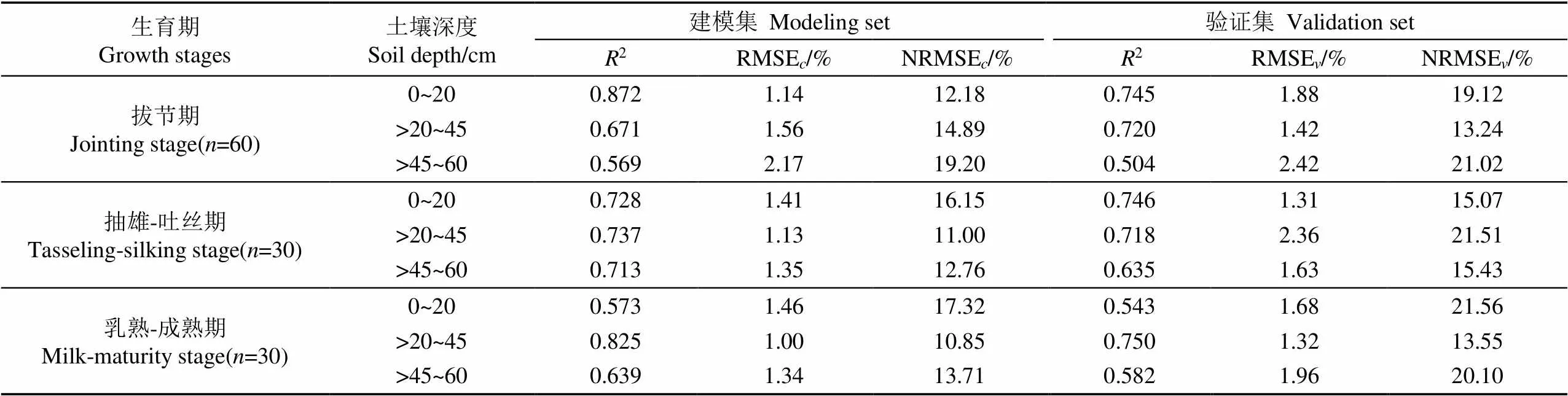
表6 不同生育期、不同深度土壤含水率的极限学习机模型反演结果评价
从表6可以看出,基于不同生育期、不用深度土壤含水率所建立的ELM模型中,隐藏神经元个数和激活函数变化差异较大,这也说明了不同条件下的模型具有一定的差异性,但是ELM模型的建模集和验证集效果差异不大,表明ELM模型较为稳健。当玉米处于拔节期,0~20 cm的建模集决定系数2和验证集决定系数2分别为0.872和0.745,均为拔节期最大值,建模集RMSE仅为1.14%,NRMSE为12.18%,属于较小差异,均为最优值,虽然RMSE(1.88%)和NRMSE(19.12%)稍大于20~45 cm,总体来看,拔节期最佳监测深度为0~20 cm,20~45 cm次之,45~60 cm较差,但是45~60 cm建模集和验证集决定系数均大于0.5,RMSE小于2.42%,NRMSE为20%左右,表明此深度仍具有一定的监测效果。
在玉米抽雄-吐丝期,3个深度的建模集和验证集决定系数均在0.635以上,除了20~45 cm的RMSE(2.36%)和NRMSE(21.51%)较大,其余建模集和验证集RMSE均小于1.63%,NRMSE均在20%以下,属于较小模型差异。0~20 cm为抽雄-吐丝期的最佳监测深度,其建模集和验证集决定系数2分别为0.728和0.746,RMSE和NRMSE分别为1.41%和16.15%,RMSE和NRMSE仅为1.31%和15.07%,20~45 cm的ELM模型效果与0~20 cm相比差异较小,45~60 cm的ELM模型精度次之。对于乳熟-成熟期,20~45 cm的ELM模型精度最佳,建模集和验证集2分别为0.825和0.750,均为该生育期的最大值,精度评价指标RMSE(1.0%)和RMSE(1.32%)均为最小值,建模集和验证集NRMSE都在15%以下。45~60 cm的ELM效果要优于0~20 cm,其建模集决定系数2=0.639,验证集决定系数2=0.582,均大于0~20 cm,建模集和验证集精度评价指标NRMSE也优于0~20 cm。因此对于玉米乳熟-成熟期时,20~45 cm的反演精度最佳,45~60 cm反演精度优于0~20 cm的反演精度。
2.5 模型综合评价
在拔节期、抽雄-吐丝期、乳熟-成熟期3个不同生育期的条件下,利用全子集筛选出0~20、20~45和45~60 cm不同深度土壤含水率的敏感波段和植被指数,分别使用岭回归和ELM两种回归方法,将构建的9个反演模型的土壤含水率预测值与土壤含水率实测值进行比较,结果如图6所示。
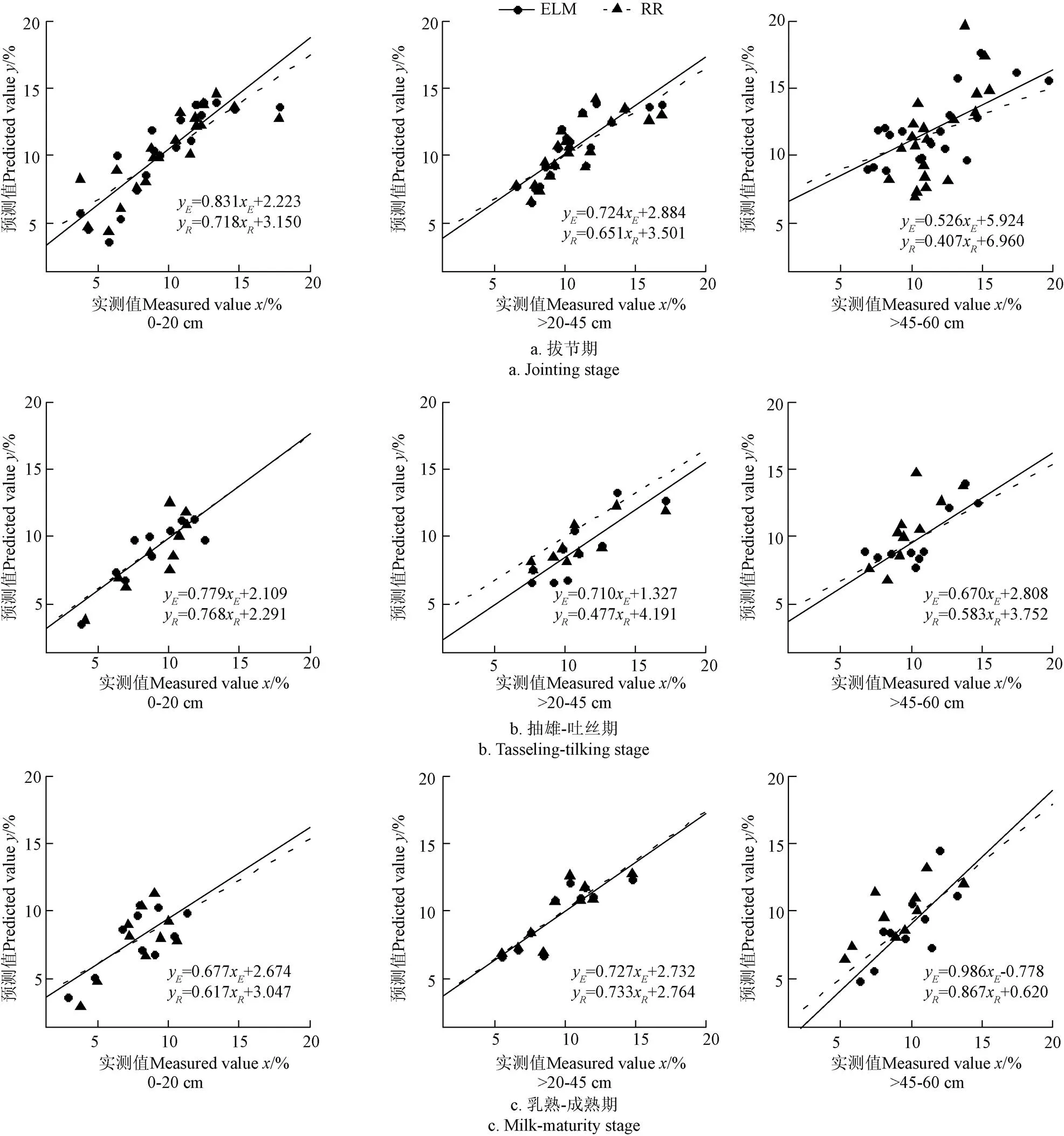
注:下标E、R分别表示极限学习机和岭回归。
由表5、表6以及图6可知,不同生育期、不同深度土壤含水率估算模型存在明显差异,同一条件下岭回归和ELM模型的估算精度也存在一定差异。拔节期45~60 cm和乳熟-成熟期0~20 cm的岭回归和ELM回归模型拟合效果相对较差,2均在0.45~0.58之间,精度评价指标NRMSE和NRMSE均在20%左右,属于中等模型差异,其余模型的预测值与实测值吻合较好。拔节期、抽雄-吐丝期、乳熟-成熟期的最佳监测深度分别为0~20 cm、0~20和20~45 cm,其岭回归和ELM模型的2在0.71~0.88之间,精度评价指标RMSE和RMSE均在1.91%以下,NRMSE和NRMSE都小于20%,属于较小模型差异,拟合曲线的斜率接近1。
所有模型中效果最优的是乳熟-成熟期的20~45 cm,ELM回归模型在建模集和验证集的2分别为0.825、0.750,RMSE和RMSE为1.00%和1.32%,NRMSE和NRMSE为10.85%和13.55%;岭回归模型在建模集和验证集的2分别为0.815和0.746,RMSE和RMSE为1.03%和1.33%,NRMSE和NRMSE为11.17%和13.74。从稳定性(建模集和验证集的2百分比)来看,ELM和岭回归模型分别为110%和109.2%,二者差异不大;但是从模型拟合度和模型预测效果来看,ELM的效果都优于岭回归模型。在其他同一生育期、同一深度下ELM模型的2都优于岭回归模型。综上所述,基于ELM回归方法建立的土壤含水率反演模型效果优于岭回归方法。
3 讨 论
土壤含水率作为土壤墒情的重要指标之一,虽然前人在土壤含水率的反演研究中取得了不错的研究成果,然而却存在着一定的不足。裸土土壤含水率[5, 17]的研究难以满足实际农田生产需要,地物光谱仪[33]采样存在耗时费力等问题,难以监测区域尺度的土壤含水率信息,田美玲等[1]和王敬哲等[34]基于冬小麦返青期的光谱数据构建了浅层土壤含水率(0~10 cm)反演模型,但该研究未能获取全生育期的无人机影像数据,也未能进行较深土层的土壤含水率反演研究;张智韬等[12]基于玉米根域平均土壤含水率(0~60 cm)建立了反演模型,但该研究并未剔除土壤背景,也未探究不同生育期下的最佳监测土壤深度,本文以不同水分胁迫处理的大田玉米为研究对象,考虑了玉米在不同生育期的主要根系及根系活动层深度的不同,并利用SVM方法消除土壤背景干扰,降低背景噪声对光谱数据造成的影响[1],能准确提取植被冠层光谱信息,结合全子集筛选法建立的敏感光谱的不同生育期、不同深度的土壤含水率反演模型,不仅有效避免了指数过多而导致的过拟合问题,还可以防止模型复杂度过高问题的出现[15]。本文在建模方法上选择了传统回归方法(RR)和机器学习算法(ELM),而张智韬等[12]只进行了机器学习模型的构建。经过对比分析发现,在相同条件下ELM算法效果要优于RR算法,因为土壤含水率与植物光谱之间并非简单的线性关系,岭回归模型在处理土壤含水率与植物光谱之间复杂关系时具有一定的局限性[33],而ELM算法在非线性问题中具有较强的解析力和较高的模型鲁棒性,这与葛翔宇等[17]和蔡亮红等[35]研究结果一致。虽然本文模型效果在其他生育期与张智韬等[12]研究差异较小,但在生殖期(Reproductive stage,R期)土壤含水率反演模型当中,本文抽雄-吐丝期的3种监测深度的建模集和验证集2均在0.628以上,远高于张智韬等[12]研究的模型效果(2在0.438~0.619之间)。
本文利用全子集筛选法列举所有的组合方式,基于BIC筛选得到不同生育期、不同深度下的最优自变量的敏感光谱组合,不同条件下全子集筛选出的敏感波段和敏感植被指数不尽相同。因为在可见光谱段和近红外谱段内,影响绿色植物叶片反射率变化的因素分别是植物色素和叶子的细胞结构[11-12],而不同生育时期玉米生长状况具有较大的差异,因而在不同生育期、同一土壤深度条件下筛选出的敏感光谱组合差异较大;而玉米在同一生育期条件下,不同植被光谱指数与土壤含水率的相关性以及相关性排序会因为不同土壤深度的变化而具有一定的差异性[36-37],全子集筛选法在选择最优模型时,会寻求模型的拟合精度和模型复杂度之间的最佳平衡,所以在同一生育期,不同土壤深度条件下的特征光谱指数也会有较大的差异。此外,不同生育期的最佳监测深度也并不相同,拔节期和抽雄-吐丝期的最佳监测深度为0~20 cm,乳熟-成熟期的最佳监测深度为20~45 cm。原因为玉米在拔节期的根系深度较浅(0~30 cm),玉米主要利用浅层的土壤水分,因而在拔节期0~20 cm的土壤含水率反演模型最优;而玉米在抽雄-吐丝期时根系下扎,部分已经达到40 cm左右,但玉米此时还是主要利用浅层的土壤水分,故0~20 cm土壤含水率的模型反演效果要稍优于20~45 cm;而玉米在乳熟-成熟期时,此时主要根系较深,但是该试验区土壤为砂壤土,灌溉方式为喷灌,玉米根系大多在60 cm以下,主根系主要集中在45 cm左右,此时20~45 cm的土壤含水率反演模型最优。
然而本研究也存在一定的不足,未考虑气象因素对土壤含水率的影响,本研究是否适用于其他地区的其他作物还有待进一步验证。今后研究将进行多源遥感信息的融合,同时结合生理生化参数共同诊断作物的水分胁迫状况,为土壤含水率的反演研究提供进一步的参考,以期为干旱地区农业监测奠定科学基础和提供技术支持。
4 结 论
1)在不同生育期下的土壤含水率反演模型中,不同生育期的最佳监测深度并不相同。拔节期最佳的土壤监测深度为0~20 cm,其次是20~45 cm,而45~60 cm相对较差;抽雄-吐丝期0~20 cm的模型效果最优,但20~45、45~60 cm估算模型与0~20 cm差异较小;乳熟-成熟期最佳监测深度为20~45 cm,45~60 cm次之,0~20 cm最差。
2)全子集筛选法可以有效地筛选最佳光谱组合,筛选变量基本都通过了显著性检验,且自变量个数较少(2~6个),表明全子集筛选法具有简易高效的优势。
3)不同水分处理小区,在不同研究时间情况下玉米冠层的光谱曲线变化趋势完全一致,在可见光谱段反射率较低,而在近红外谱段反射率较高,且光谱曲线全部呈现出“绿峰红谷”的变化。
4)对比同一生育期,同一土壤深度所建立的岭回归和极限学习机的土壤含水率反演模型,这两种模型算法均具有一定的鲁棒性,但ELM模型的建模集和验证集决定系数均高于岭回归,精度评价指标RMSE和NRMSE,也几乎均优于岭回归模型。因此,ELM模型是本次植被覆盖条件下玉米根域土壤含水率的最优模型。
[1]田美玲,葛翔宇,丁建丽,等. 耦合机器学习和机载高光谱数据的土壤含水量估算[J]. 激光与光电子学进展,2020,57(9):1-15.
Tian Meiling, Ge Xiangyu, Ding Jianli, et al. Coupled machine learning and UAV-based hyperspectral imagery for soil water content estimation[J]. Laser & Optoelectronics Progress,2020, 57(9): 1-15. (in Chinese with English abstract)
[2]Rijal S, Zhang X, Jia X. Estimating surface soil water content in the red river valley of the north using landsat 5 TM data[J]. Soil Science Society of America Journal, 2013, 77(4): 1133-1143.
[3]Millard K, Thompson D, Parisien M, et al. Soil moisture monitoring in a temperate peatland using multi-sensor remote sensing and linear mixed effects[J]. Remote Sensing, 2018, 10(6): 903-918.
[4]Hassan-Esfahani L, Torres-Rua A, Jensen A, et al. Assessment of surface soil moisture using high-resolution multi-spectral imagery and artificial neural networks[J]. Remote Sensing, 2015, 7(3): 2627-2646.
[5]杨曦光,于颖. 基于试验反射光谱数据的土壤含水率遥感反演[J]. 农业工程学报,2017,33(22):195-199.
Yang Xiguang, Yu Ying. Remote sensing inversion of soil moisture based on laboratory spectral reflectance data[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(22): 195-199. (in Chinese with English abstract)
[6]刘建刚,赵春江,杨贵军,等. 无人机遥感解析田间作物表型信息研究进展[J]. 农业工程学报,2016,32(24):98-106.
Liu Jiangang, Zhao Chunjiang, Yang Guijun, et al. Review of field-based phenotyping by unmanned aerial vehicle remote sensing platform[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(24): 98-106. (in Chinese with English abstract)
[7]Baluja J, Diago M P, Balda P, et al. Assessment of vineyard water status variability by thermal and multispectral imagery using an unmanned aerial vehicle (UAV)[J]. Irrigation Science, 2012, 30(6): 511-522.
[8]Romero M, Luo Y, Su B, et al. Vineyard water status estimation using multispectral imagery from an UAV platform and machine learning algorithms for irrigation scheduling management[J]. Computers and Electronics in Agriculture, 2018, 147: 109-117.
[9]Zhang L, Zhang H, Niu Y, et al. Mapping Maize Water Stress Based on UAV Multispectral Remote Sensing[J]. Remote Sensing, 2019, 11(6): 605.
[10]陈俊英,陈硕博,张智韬,等. 无人机多光谱遥感反演花蕾期棉花光合参数研究[J]. 农业机械学报,2018,49(10):230-239.
Chen Junying, Chen Shuobo, Zhang Zhitao, et al. Retrieving photosynthetic parameters in cotton during budding period by multi-spectral remote sensing of unmanned aerial vehicle[J]. Transaction of the Chinese Society for Agricultural Machinery, 2018, 49(10): 230-239. (in Chinese with English abstract)
[11]赵英时. 遥感应用分析原理与方法[M]. 第二版. 北京:科学出版社,2003.
[12]张智韬,谭丞轩,许崇豪,等. 基于无人机多光谱遥感的玉米根域土壤含水率研究[J]. 农业机械学报,2019,50(7):246-257.
Zhang Zhitao, Tan Chengxuan, Xu Chonghao, et al. Retrieving soil moisture content in filed maize root zone based on UAV multispectral remote sensing[J]. Transaction of the Chinese Society for Agricultural Machinery, 2019, 50(7): 246-257. (in Chinese with English abstract)
[13]王海峰,张智韬,Arnon Karnieli,等. 基于灰度关联-岭回归的荒漠土壤有机质含量高光谱估算[J]. 农业工程学报,2018,34(14):124-131.
Wang Haifeng, Zhang Zhitao, Arnon Karnieli, et al. Hyperspectral estimation of desert soil organic matter content based on gray correlation-ridge regression model[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(14): 124-131. (in Chinese with English abstract)
[14]张海威,张飞,张贤龙,等. 光谱指数的植被叶片含水量反演[J]. 光谱学与光谱分析,2018,38(5):1540-1546.
Zhang Haiwei, Zhang Fei, Zhang Xianlong, et al. Inversion of vegetation leaf water content based on spectral index[J]. Spectroscopy and Spectral Analysis, 2018, 38(5): 1540-1546. (in Chinese with English abstract)
[15]张智韬,韩佳,王新涛,等. 基于全子集-分位数回归的土壤含盐量反演研究[J]. 农业机械学报,2019,10(50):142-152.
Zhang Zhitao, Han Jia, Wang Xintao, et al. Soil salinity inversion method by satellite remote sensing based on best subsets-quantile regression model[J]. Transaction of the Chinese Society for Agricultural Machinery , 2019, 10(50): 142-152. (in Chinese with English abstract)
[16]Imani M, Ghassemian H. Ridge regression-based feature extraction for hyperspectral data[J]. International Journal of Remote Sensing, 2015, 36(6): 1728-1742.
[17]葛翔宇,丁建丽,王敬哲,等. 基于竞争适应重加权采样算法耦合机器学习的土壤含水量估算[J]. 光学学报,2018,38(10):393-400.
Ge Xiangyu, Ding Jianli, Wang Jingzhe, et al. Estimation of soil moisture based on CARS algorithm coupled with machine learning[J]. Acta Optica Sinica, 2018, 38(10): 393-400. (in Chinese with English abstract)
[18]汪小钦,王苗苗,王绍强,等. 基于可见光波段无人机遥感的植被信息提取[J]. 农业工程学报,2015,5(31):152-159.
Wang Xiaoqin, Wang Miaomiao, Wang Shaoqiang, et al. Extraction of vegetation information from visible unmanned aerial vehicle images[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 5(31): 152-159. (in Chinese with English abstract)
[19]Verrelst J, Schaepman M E, Koetz B, et al. Angular sensitivity analysis of vegetation indices derived from CHRIS/PROBA data[J]. Remote Sensing of Environment, 2008, 112(5): 2341-2353.
[20]Schneider P, Roberts D A, Kyriakidis P C. A VARI-based relative greenness from MODIS data for computing the Fire Potential Index[J]. Remote Sensing of Environment, 2008, 112(3): 1151-1167.
[21]Zarcotejada P, Berjon A, Lopezlozano R, et al. Assessing vineyard condition with hyperspectral indices: Leaf and canopy reflectance simulation in a row-structured discontinuous canopy[J]. Remote Sensing of Environment, 2005, 99(3): 271-287.
[22]Haboudane D, Miller J R, Tremblay N, et al. Integrated narrow-band vegetation indices for prediction of crop chlorophyll content for application to precision agriculture[J]. Remote Sensing of Environment, 2002, 81(2): 416-426.
[23]Penuelas J, Baret F, Filella I. Semiempirical indexes to assess carotenoids chlorophyll-a ratio from leaf spectral reflectance[J]. Photosynthetica, 1995, 31: 221-230.
[24]Wang F, Huang J, Tang Y, et al. New vegetation index and its application in estimating leaf area index of rice[J]. Rice Science, 2007, 14(3): 195-203.
[25]Xue L, Cao W, Luo W, et al. Monitoring leaf nitrogen status in rice with canopy spectral reflectance[J]. Agronomy Journal, 2004, 96(1): 135-142.
[26]Chen J M. Evaluation of vegetation indices and a modified simple ratio for boreal applications[J]. Canadian Journal of Remote Sensing, 1996, 22(3): 229-242.
[27]Mishra S, Mishra D R. Normalized difference chlorophyll index: A novel model for remote estimation of chlorophyll-a concentration in turbid productive waters[J]. Remote Sensing of Environment, 2012, 117: 394-406.
[28]Rouse J W, Haas R W, Schell J A, et al. Monitoring the vernal advancement and retrogradation (greenwave effect) of natural vegetation[R]. Nasa, 1973.
[29]Burnham K P, Anderson D R. Multimodel inference: understanding AIC and BIC in model selection[J]. Sociological Methods & Research, 2016, 33(2): 261-304.
[30]Deo R C, Tiwari M K, Adamowski J F, et al. Forecasting effective drought index using a wavelet extreme learning machine (W-ELM) model[J]. Stochastic Environmental Research and Risk Assessment, 2017, 31(5): 1211-1240.
[31]吕晓翠,李国林,李晗,等. 基于特征提取的ELM算法在TDLAS光谱分析中的应用[J]. 中国激光,2018,45(9):0911012.
Lu Xiaocui, Li Guolin, Li Han, et al. The application of feature extraction based ELM algorithm in TDLAS spectral analysis[J]. Chinese Journal of Lasers, 2018, 45(9): 0911012. (in Chinese with English abstract)
[32]王俊霞,潘耀忠,朱秀芳,等. 土壤水分反演特征变量研究综述[J]. 土壤学报,2019,56(1):23-35.
Wang Junxia, Pan Yaozhong, Zhu Xiafang, et al. A review of researches on inversion of eigenvariance of soil water[J]. Acta Pedologica Sinica, 2019, 56(1): 23-35. (in Chinese with English abstract)
[33]陈文倩,丁建丽,谭娇,等. 干旱区绿洲植被高光谱与浅层土壤含水率拟合研究[J]. 农业机械学报,2017,48(12):229-236.
Chen Wenqian, Ding Jianli, Tan Jiao, et al. Fitting of hyperspectral reflectance of vegetation and shallow soil water content in oasis of arid area[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(12): 229-236. (in Chinese with English abstract)
[34]王敬哲,丁建丽,马轩凯,等. 基于光谱指数的绿洲农田土壤含水率无人机高光谱检测[J]. 农业机械学报,2018,49(11):164-172.
Wang Jingzhe, Ding Jianli, Ma Xuankai, et al. Detection of soil moisture content based on UAV-derived hyperspectral imagery and spectral index in oasis cropland[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(11): 164-172. (in Chinese with English abstract)
[35]蔡亮红,丁建丽. 基于变量优选和ELM算法的土壤含水量预测研究[J]. 光谱学与光谱分析,2018,38(7):2209-2214.
Cai Lianghong, Ding Jianli. Prediction for water content based on variable preferred and extreme learning machine algorithm[J]. Spectroscopy and Spectral Analysis, 2018, 38(7): 2209-2214. (in Chinese with English abstract)
[36]刘晓静,陈国庆,王良,等. 基于SOC710VP高光谱成像仪的冬小麦土壤含水率反演模型研究[J]. 灌溉排水学报,2019,38(3):35-42.
Liu Xiaojing, Chen Guoqing, Wang Liang, et al. Estimating soil moisture distribution in winter wheat field using SOC710VP hyperspectral imagery[J]. Journal of Irrigation and Drainage, 2019, 38(3): 35-42. (in Chinese with English abstract)
[37]王宏博,冯锐,纪瑞鹏,等. 干旱胁迫下春玉米拔节-吐丝期高光谱特征[J]. 光谱学与光谱分析,2012,32(12):3358-3362.
Wang Hongbo, Feng Rui, Ji Ruipeng, et all. Hyperspectral characteristics of spring mazie from jointing to silking stage under drought stress[J]. Spectroscopy and Spectral Analysis, 2012, 32(12): 3358-3362. (in Chinese with English abstract)
Soil water content inversion model in field maize root zone based on UAV multispectral remote sensing
Tan Chengxuan1,2, Zhang Zhitao1,2※, Xu Chonghao1, Ma Yu1, Yao Zhihua1, Wei Guangfei1, Li Yu1
(1.712100,; 2.712100,)
The rapid acquisition of soil water content (SWC) in field crop root zone is significant for drought supervision and precision irrigation. The UAV multispectral remote sensing system has the advantages of obtaining high spatial-temporal resolution of crop phenotype data, and has a wide application prospect in soil moisture monitoring. In order to obtain SWC accurately and timely at a farm scale, in this paper, the field maize with different water treatments is taken as the research object, and the multispectral remote sensing monitoring of summer maize is carried out by using the UAV remote sensing platform, and the soil water content of different soil depth in maize root zone is collected synchronously. Based on the UAV multispectral remote sensing image data sets of jointing stage, tasseling-silking stage and milky-maturity stage of summer maize in 2018, the soil background is removed by support vector machine classification, the spectral reflection of maize canopy is extracted, and the 10 vegetation indices are calculated, then the sensitivity analysis of soil water content in different depth is carried out by using full subset screening method for different wave bands and vegetation indices, and the soil water content in different depth is analyzed respectively, ridge regression and extreme learning machine are used to construct quantitative estimation models of soil water content at 0-20, 20-45 and 45-60 cm soil depth after full subset selection.The test area is located in Zhaojun Town, Dalate Banner, Ordos, Inner Mongolia, China(40°26'0.29" N, 109°36'25.99" E, elevation 1 010 m). The sowing time of maize is on May 11, 2018, the emergence time is on May 18, and the harvest time is on September 8, 2018. The total growth period is 114 days. The UAV multispectral remote sensing images and ground data collection dates are July 8, July 12, July 17, July 21, July 26, August 2, August 28 and September 7, 2018. It is collected once a day and tested 8 times in the whole growth period. July 8-21 is the jointing stage, July 26-August 2 is the tasseling-silking stage, August 28-september 7 is the milk-maturity stage. The flight altitude of the UAV is 70 m, and the flight time is 11:00-13:00 local time (11:44-13:44 Beijing time). Firstly, the UAV multispectral canopy images of field maize with 5 different irrigation treatments (TRTs) are acquired through the six-rotor UAV equipped with a RedEdge multispectral camera ( MicaSense, USA), and the multispectral images of diffuse reflector (reflectivity 58%, size 3×3 m) are collected at the same height to perform radiometric correction in the meantime, and then the spectral reflectances of the field maize are acquired. Secondly, the support vector machine (SVM) is used to eliminate the multispectral image of soil background in ENVI and ArcGIS software, then the maize canopy spectral reflectance is extracted and 10 vegetation indices (VIs), such as Normalized Difference Vegetation Index (NDVI), Normalized Green Difference Vegetation Index (GNDVI) and Transformed Chlorophyll Absorption In Reflectance Index(TCARI), etc, are calculated. Finally, the full subset selection method based on Bayesian Information Criterion (BIC) is used to analyze the sensitivity of SWC at different depths for different spectra bands and vegetation indices in R3.5.1 software, and then Ridge Regression (RR) as well as Extreme Learning Machine (ELM) are used to construct a quantitative estimation model of SWC at soil depths of 0-20, 20-45 and 45-60 cm at different growth stages, respectively. The results show that the full subset selection method based on BIC can effectively select the optimal spectral subset, and the selected variables generally pass the significance test and the independent variables number is small; the effects of the ELM model outperformed the RR model almost under all the same conditions; the optimal monitoring soil depth of maize at jointing stage, tasseling-silking stage is 0-20 cm, and the optimal monitoring soil depth of milk-maturity stage is 20-45 cm; the ELM inversion model at 20-45 cm soil depth at milk-maturity stage has the best effect, the decision coefficients of modeling set and verification set are 0.825 and 0.750, respectively, the root mean square error are 1.00% and 1.32%, respectively, and the normalized root mean square error are 10.85% and 13.55%, respectively. The combination of full subset selection method and machine learning can improve the inversion accuracy and robustness of SWC. This study provides a new way for rapid and accurate monitoring of SWC in farmland and precise irrigation.
soil water content; remote sensing; models; full subset selection; machine learning; inversion
谭丞轩,张智韬,许崇豪,等. 无人机多光谱遥感反演各生育期玉米根域土壤含水率[J]. 农业工程学报,2020,36(10):63-74.doi:10.11975/j.issn.1002-6819.2020.10.008 http://www.tcsae.org
Tan Chengxuan, Zhang Zhitao, Xu Chonghao, et al. Soil water content inversion model in field maize root zone based on UAV multispectral remote sensing[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(10): 63-74. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2020.10.008 http://www.tcsae.org
2020-01-14
2020-04-24
国家重点研发计划项目(2017YFC0403302)、国家自然科学基金项目(51979234、51979232)和杨凌示范区科技计划项目(2018GY-03)
谭丞轩,博士生,主要从事无人机遥感与节水灌溉技术研究。Email:chengxuantan@nwafu.edu.cn
张智韬,博士,副教授,主要从事遥感技术在水资源高效利用研究。Email:zhitaozhang@126.com
10.11975/j.issn.1002-6819.2020.10.008
S152.7; TP79
A
1002-6819(2020)-10-0063-12
猜你喜欢
冶金能源(2022年5期)2022-10-14
中等数学(2022年5期)2022-08-29
——缺陷度的算法研究
条码与信息系统(2022年3期)2022-07-05
汽车电器(2022年6期)2022-07-02
中国农业气象(2022年1期)2022-02-11
作物学报(2022年3期)2022-01-22
成都信息工程大学学报(2021年5期)2021-12-30
成都信息工程大学学报(2021年5期)2021-12-30
中国土壤与肥料(2021年5期)2021-12-02
大豆科技(2021年4期)2021-11-19