
点云数据预处理研究
2020-07-09 22:13王嘉鑫赵夫群
现代信息科技 2020年2期
王嘉鑫 赵夫群


摘 要:随着三维激光扫描技术的发展,点云数据采集和预处理技术成为日益关注的研究热点。文章主要研究点云预处理中的几个关键技术,即点云去噪声、点云简化、点云配准以及点云补洞等。通过点云数据预处理,可以得到稳健的点云数据模型,为后续的曲面构建及三维实体模型生成提供良好的数据基础。
关键词:点云预处理;点云去噪;点云简化;点云配准;点云补洞
中图分类号:TP391.7 文献标识码: A 文章编号:2096-4706(2020)02-0129-03
Abstract:With the development of 3D laser scanning technology,point cloud data acquisition and preprocessing technology has become a research hotspot. This paper focuses on several key technologies of point cloud preprocessing,including point cloud denoising,point cloud simplification,point cloud registration and point cloud patching. Through the preprocessing of point cloud data,a robust point cloud data model can be obtained,which provides a good data base for the subsequent surface construction and 3D solid model generation.
Keywords:point cloud preprocessing;point cloud denoising;point cloud simplification;point cloud registration;point cloud patching
0 引 言
随着三维激光扫描技术的发展,点云数据采集和预处理技术成为备受关注的研究热点,目前已被广泛地应用于医学研究、文物数字化保护、游戏软件开发以及工程应用等领域[1-6]点云数据采集具有快速、穿透性强、不接触实物、实时性和动态性强、主动性、数字化、高密度和高效率等优点,其发展前景和应用需求广阔[7]。
在实际的点云数据模型获取中,由于物体本身的遮挡、关照不均匀等原因,三维激光扫描设备对复杂形状物体的某些区域容易扫描为视觉盲点,因此容易造成扫描“盲区”,形成孔洞。同时由于扫描设备测量范围有限,对于大尺寸物体或者大范围场景,不能一次性进行完整测量,必须多次扫描测量,因此扫描结果往往是多块具有不同坐标系统且存在噪声的点云数据,不能够完全满足人们对数字化模型真实度和实时性的要求,所以需要对三维点云数据进行去噪、简化、配准以及补洞等预处理。本文主要研究点云数据模型的预处理技术,主要包括点云去噪声、点云简化、点云配准以及点云补洞等,并通过实验验证相关的预处理技术。
1 点云数据采集
通常采集点云数据有两种方式,即接触式扫描采集和非接触式扫描采集。由于接触式扫描采集方式直接和被测物体接触,可能会导致被测物存在一定程度的变形,影响数据采集的准确性,而且直接接触有些被测物容易造成二次破坏,如出土的文物,因此非接触式扫描采集方式应用得更加广泛。
目前非接触式采集物体点云数据模型的方法主要有三种:一是手工建模法,该方法利用三维建模软件实现点云数据获取,可以获得较为规则的点云数据模型,但是模型精度不夠高,工作人员的工作量比较大;二是利用物体的二维图像通过三维重建的方式获取点云数据模型,该方法的成本较低,但是需要的二维图像数量大,建模的真实感较差,获取效率较低;三是采用三维激光扫描设备获取物体的点云数据模型,该方法方便、快捷、建模准确,能够精细地获得物体表面的几何纹理信息,目前已得到广泛的应用。在众多的三维激光扫描设备中,加拿大手持式Handyscan3D激光扫描仪是常用的点云模型获取工具之一,其操作简单、体积小、携带方便,而且扫描获取的物体的点云数据模型的分辨率较高,可以获得物体的obj、stl、ply、3ds以及wip等多种格式的点云模型文件。
2 点云数据预处理
2.1 点云去噪
通常点云数据模型中的噪声分为客观噪声和主观噪声两大类,其中客观噪声是由物理测量所产生的误差引起的,而主观噪声则是由扫描现场无关物的干扰引起的。对于不同的噪声类型,所采用的去噪方法也不同。客观噪声的消除通常采用去噪算法实现,如K-邻域搜索算法、空间栅格算法、k-D tree算法以及Laplace算法等。主观噪声通常是为了扩大被测物的扫描范围所引起的,通常表现为大片的点云,因此借助三维模型处理软件可以对其进行手动消除。以一个噪声兔子点云为例,采用Geomagic 2012软件对其进行手动去噪的结果如图1所示。
2.2 点云简化
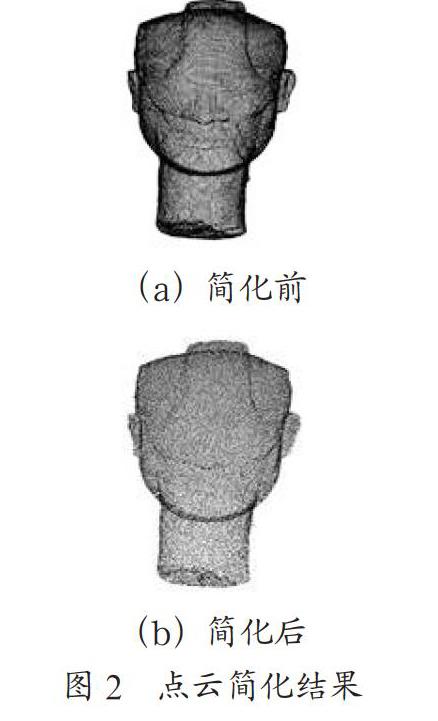
通常三维扫描设备获取的点云数据模型的数据量都很大,数据点较为密集,对其存储、传输和计算均不利,因此有必要对其进行简化[8]。点云简化的基本原则为:对于点云模型中曲率较大的地方,要尽量保留较多的数据点,而对于点云模型中曲率较小的地方,可以保留较少的数据点。点云简化的方法主要分成四类:一是根据点云简化密度和曲面变分进行简化,二是根据点云中点的数目和点云表面变化系数对点云进行分块简化,三是根据点云中点的曲率值大小进行简化,四是采用聚类算法完成点云数据简化。不管采用哪种简化方法,其目的都是为了在精简数据的同时,有效保持点云的尖锐特征。如采用一种保留几何特征的算法[9]对公共点云数据模型进行简化,简化结果如图2所示。
2.3 点云配准
在采用三维激光扫描设备获取被测物的点云数据模型时,通常一次扫描很难获取整个物体的完整点云数据信息,因此需要对同一物体在不同坐标系下进行不同角度下的多次扫描,并对多次扫描的结果进行配准,从而获得整个物体的完整点云数据模型。因此,点云配准就是将同一物体在不同方位下测得的点云数据模型通过刚体变换,使其能够统一到同一坐标系的过程。根据配准规模,点云配准分为两大类,即两片点云配准和多片点云配准,而多片点云配准可以通过两片点云的多次配准实现,因此点云配准主要研究的是两片点云的配准。
本文采用一种基于几何属性和改进ICP的点云配准算法[10]实现公共兔子点云数据模型的配准,该配准过程主要包括:计算点云中点的法矢和曲率特征、检测配准点对、相似性度量、剔除错配点对以及k-D tree精配准等步骤,配准结果如图3所示。
2.4 点云补洞
由于被测物体本身形状各异,部分表面凹凸不平,甚至不够规则、存在空腔,因此在采用三维扫描仪对其进行扫描时,可能会导致物体表面的很多区域没有被扫描到,从而形成扫描“盲区”,产生许多形状各异、大小不一的孔洞。本文采用一种基于泊松方程的修复算法来实现孔洞修补[11],首先建立几何泊松方程,并对模型外表面进行拟合,然后裁剪拟合曲面并与孔洞缝合,从而实现点云孔洞修补,修补结果如图4所示。
3 结 论
本文首先介绍了点云数据模型采集的两种方式,即接触式扫描采集和非接触式扫描采集,并通过对两种采集方式的对比体现非接触式扫描采集的优势;然后重点介绍了点云数据预处理中涉及到的几个主要研究内容,即点云去噪声、点云简化、点云配准以及点云补洞等。通过数据预处理,可以有效剔除点云中的噪声和外点,在保持几何特征的基础上实现点云数据简化,并将不同角度扫描的点云统一到同一坐标系下,为后续的曲面构建及三维实体模型生成提供稳健的数据基础。
参考文献:
[1] 刘鸣,舒勤,杨赟秀,等.基于独立成分分析的三维点云配准算法 [J].激光与光电子学进展,2019,56(1):181-189.
[2] PERSAD R A,ARMENAKIS C. Automatic co-registration of 3D multi-sensor point clouds [J].ISPRS Journal of Photogrammetry and Remote Sensing,2017,130:162-186.
[3] ZHANG Z,XU H L,YIN H. A Fast Point Cloud Registration Algorithm Based on Key Point Selection [J].Laser & Optoelectronics Progress,2017,54(12):121002.
[4] QUAN S W,MA J,HU F Y,et al. Local voxelized structure for 3D binary feature representation and robust registration of point clouds from low-cost sensors [J].Information Sciences,2018(444):153-171.
[5] 黄源,达飞鹏,陶海跻.一种基于特征提取的点云自动配准算法 [J].中国激光,2015,42 (3):250-256.
[6] CHANKI Y,DA J. A maximum feasible subsystem for globally optimal 3D point cloud registration [J].Sensors,2018,18(2):544-553.
[7] 李国镇.基于Kinect的三维重建方法的研究与实现 [D].北京:北京交通大学,2012.
[8] 宋诗超,禹素萍,许武军.基于Kinect的三维人体扫描、重建及测量技术的研究 [J].天津工业大学学报,2012,31(5):34-37+41.
[9] 张雨禾,耿国华,魏潇然,等.保留几何特征的散乱点云简化算法 [J].计算机辅助设计与图形学学报,2016,28(9):1420-1427.
[10] 赵夫群,贾一婷.基于几何属性和改进ICP的点云配准方法 [J].信息技术,2019,43(4):33-38.
[11] 李月雯.面向文物数字化建模的网格模型孔洞修补算法研究 [D].西安:西北大学,2017.
作者简介:王嘉鑫(1999-),男,汉族,山西运城人,本科,研究方向:软件工程;赵夫群(1982-),女,汉族,山东临沂人,副教授,博士,研究方向:图形图像處理。
