
基于卷积神经网络的车辆识别技术研究
2020-07-09 08:27欧华杰
环境技术 2020年3期
欧华杰
(北京市海淀区职工大学,北京 100083)
引言
交通管理现状与需求矛盾的进一步加剧,使每年伪造车牌、肇事逃逸、车辆违章行驶、机动车辆偷盗、遮挡车牌以及套牌车辆的违法案例越来越多[1]。为适应我国现代化智能交通建设的需要,针对交通道路车辆实时运行情况监控,因此提出基于卷积神经网络的车辆识别技术研究[2]。基于卷积神经网络的车辆识别技术能够满足目前治安卡口对车牌识别需求,对来往车辆车牌与类型快速识别,并判断车辆的合法情况,对违法犯罪车辆自动报警,同时提供查询功能,快速查询历史过往车辆信息、自动生成和导出车辆统计信息,方便操作人员对道路安全进行监控[3]。研究过程中,考虑到车辆行驶过程中对周围环境信息实时性检测需求,根据所检测到不同类型障碍物采取处理,快速完成不同环境下车辆识别。
1 基于卷积神经网络的车辆识别技术
1.1 基于卷积神经网络的车辆识别模型
依据卷积神经网络特点,车辆识别模型设计不同网络层,通过设置模型层数与超参数影响整体模型训练过程和最终性能。模型以满足实际应用性为基础,使用五个卷积层模块结构,后面紧跟若干个全连接层[4]。在各卷积层中加入不同模块,加深卷积层内部网络深度效果,整体全连接层提取能够更多全局信息[5]。基于卷积神经网络的车辆识别模型示意图,如图1所示。
模型包含五个卷积层与两个圈连接层,将局部信息卷积层特征映射到全连接层,实现网络中间部分特征图不变条件下,实现整体网络对任意大小输入处理。
第一层卷积层示意图,如图2所示。
在第一卷积层中,提取图像大小为224*224*3,卷积核尺寸是3*3,卷积核个数为32。控制第一层卷积层参数量,使用ReLU激活函数,经第一层处理后,得到车辆识别最大采样操作大小为112*112*32的特征图[6]。
经第一卷积层处理后,进入第二卷积层处理,其结构图,如图3所示。
第二卷积层操作滑动步长为2,且不使用下层采样层。其卷积核大小为3*3,卷积核个数为64,将特征图尺寸降为56*56,使用ReLU激活函数,最终得到处理后特征车辆图像尺寸为56*56*64的细节特征图像[7]。
模型中第三、第四卷积层操作与第二卷积层操作相同,但卷积层核个数上升为128和256个;第五卷积层操作与第一卷积层操作相同,但卷积层个数升为512。
经各卷积层处理后,形成不同等级特征提取,构成基于卷积神经网络的车辆识别模型。
1.2 车辆特征分类
模型提取车辆数据信息后,用卷积核输入原始图像,得到卷积图结果加偏位置第一层特征图。随后得到池化过程,将池化窗口内像素相加,通过激活函数与权值加权与加偏,得到原始图像缩小图像特征图[8]。
在车辆图像卷积过程中,C1卷积层采用6个5*5大小卷积核对大小为256*256的输入图像进行卷积,得到C1层输出大小为252*252的6张特征图。该层计算参数量为6*(5*5+1)=156。得到特征图大小为:

式中:
W—输入图像大小为W×W,其卷积核大小为F×F;
P—填充像素个数;
S—卷积核步长。
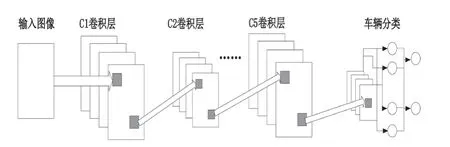
图1 基于卷积神经网络的车辆识别模型示意图

图2 模型网络C1层结构示意图
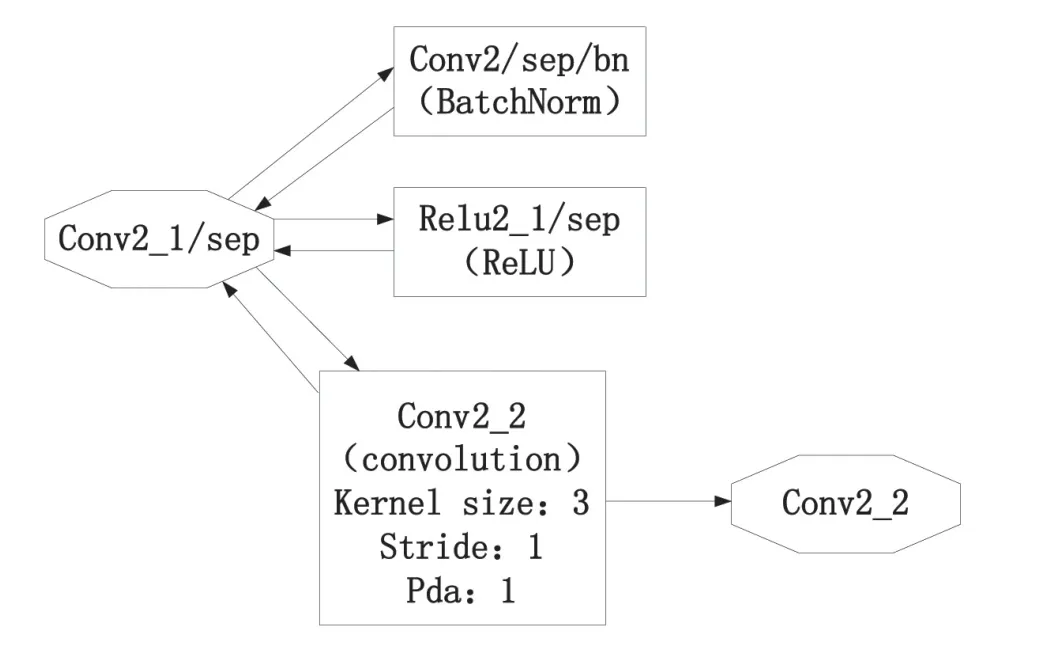
图3 模型网络C2层结构示意图
基于卷积神经网络的车辆识别模型存在大量数据样本,将常见的将小汽车、公交车与货车分为三个类型,数据来源以Stanford Cars Dataset车辆数据集、BITVehicle Dataset车辆数据集为主,部分缺失数据自制补充[9]。Stanford Cars Dataset车辆数据集中包括16 185张车辆样本信息,其中含有8 041张测试样本与8 144张训练样本,并含有车辆位置标注信息[10]。BIT-Vehicle Dataset车 辆 数 据 集 中 包 含Bus,Microbus,Minivan,Sedan,SUV和Truck六种类别,作为数据补充[11]。在两种数据集中包含货车与公交车样本数据较少,因此自制数据库以构建货车与公交车样本数据集为重点。
考虑到分类过程中,不同天气和环境变化对车辆分类有很大的影响,采集不同光照、天气与环境条件下车辆图像作为训练数据来训练分类网络,满足卷积神经网络识别模型训练需求[12]。为避免过度拟合现象。在模型中输入大量样本数据后,使用数据增强方式扩大数据库。自制样本输入数据后,存储样本车辆缩放变换图像、平移变换图像、对比度变换图像以及噪声扰动图像,方便识别过程中提取各种环境下不同车辆图像[13]。
由于不同数据集标签信息不一致,因此对提取车辆特征标签实现统一化处理,将样本统一转化为PASCAL VOC的数据集的格式,如表1所示。
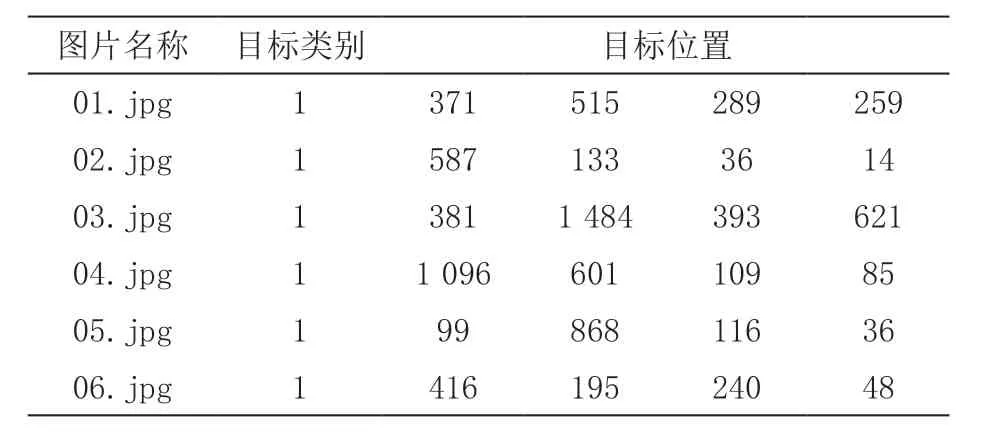
表1 数据样本格式
其中,数据样本格式中目标类型中0为背景、1类别为小汽车、2为公交车、3为货车。后面目标位置分别为目标图像左上角与右上角坐标值[14]。
在输入图像后,经第一卷积层后得到特征图大小将变成55x55,同时将步长减到2[15]。修改后网络结构,如表2所示。
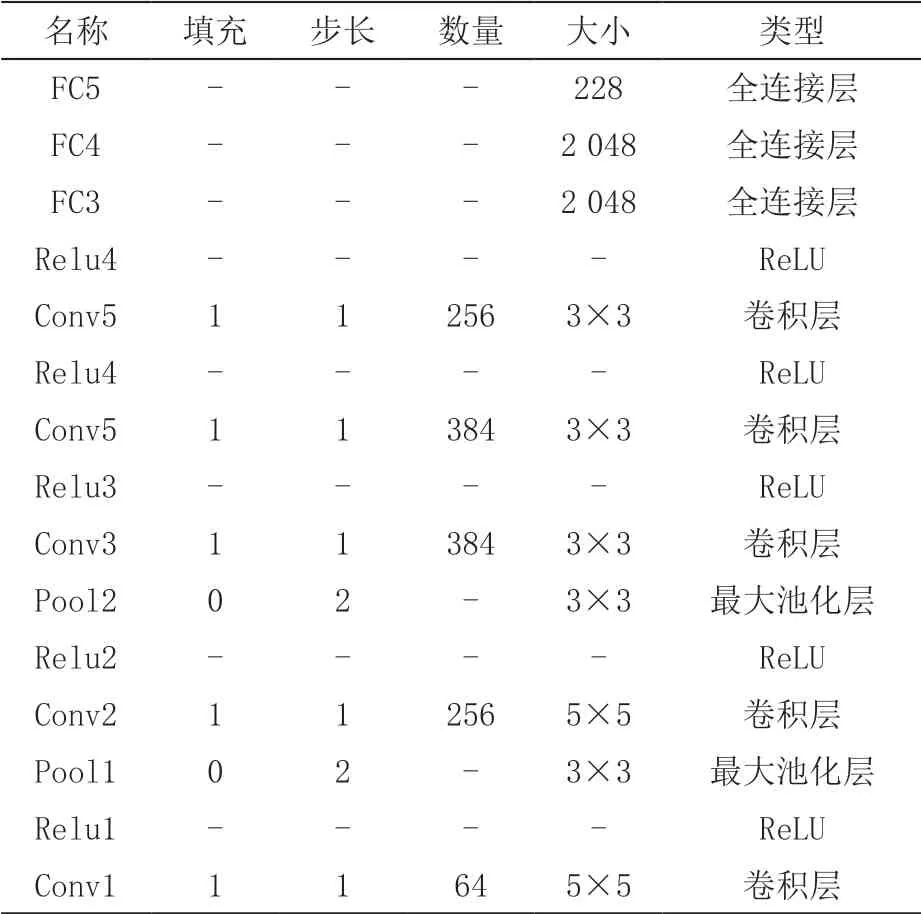
表2 AlexNrt结构
根据车辆AlexNrt结构不同,完成车辆提取特征图信息分类。
1.3 车辆特征识别
利用修改后网络结构进行batch_size进行训练,采用SoftMax损失函数,依据图像的局部信息相关性,尽可能的保留图像的特征。车辆特征提取过程,如图4所示。
特征图像经前三层卷积层处理后,提取到包含轮廓和纹理在内的低层次图像特征。后面两层卷积层根据车辆不同区域具有不同的统计特征的不共享参数,充分提取不同车辆位置的特征信息,得到数据库中相关信息与不同位置间的相关性,得到最终分类结果。
局部卷积核对车辆识别进行有效特征分类,使网络在训练时需要训练参数量大大增加,提高网络训练时计算量。通过观察通用图像识别网络定义车辆不同关键区域,车辆特征提取示意图,如图5所示。

图4 车辆特征提取过程
得到提取特征后,提取数据库中对应区域训练得到不共享卷积参数,使相互独立的网络只在他们所对应的区域上进行训练。最终将大卷积核改为多个小卷积核后AlexNet。得到车辆关键区域特征识别网络,如表3所示。
根据车辆关键区域特征识别,完成车辆特征识别,同时提取数据库中车辆信息,完成卷积神经网络的车辆识别。
2 仿真实验
2.1 实验准备
设计仿真实验对比基于卷积神经网络的车辆识别技术、基于视频图像处理的车辆识别技术的在相同实验环境下识别结果准确率。实验硬件测试环境采用常见交通管理系统硬件,其配置如表4所示。
实验选取包括21个品牌,总共356款车型在内的车辆图像7 086张,将识别样本分为10个测试集,车辆拍摄环境不同,存在白天、黑夜、阴天等多种拍摄环境。测试两种技术对不同环境下车辆识别结果,取多个测试集结果平均值,对比两组车辆测试结果准确性。
2.2 实验结果对比

图5 车辆特征提取示意图

表3 车辆关键区域特征识别网络
实验结果选取包括十字路口、夜晚、雨雪等几种较为常见的复杂车辆行驶环境,实验过程中两种技术准确率随着训练迭代次数变化而变化,其基于视频图像处理的车辆识别技术识别结果,如表5所示。
分析表5数据,得到基于视频图像处理的车辆识别技术准确率,如图6所示。
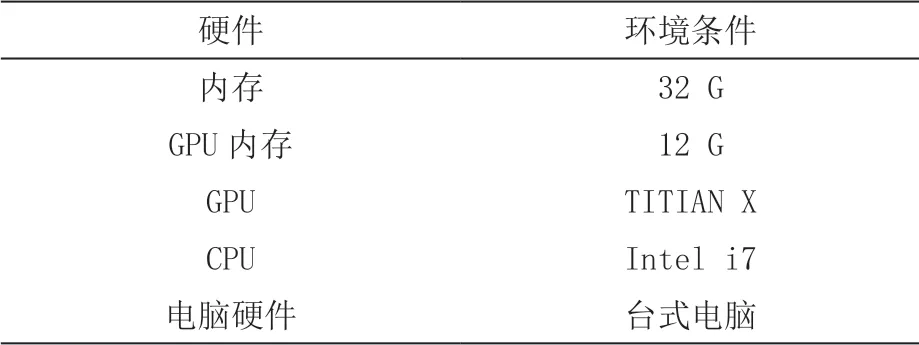
表4 实验硬件运行环境
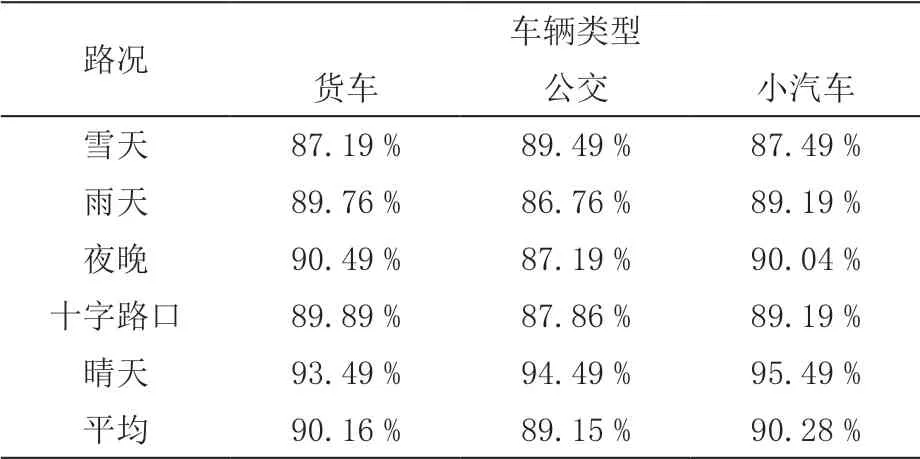
表5 基于视频图像处理特定路况车辆识别情况

图6 基于视频图像处理的车辆识别技术准确率
分析图6可以看出,基于视频图像处理的车辆识别技术在不同场景车辆识别结果存在一定差异,且对不同类型车辆识别也存在一定差异。该技术识别结果在晴天环境下对不同类型车辆识别准确度最好,但在雪天与雨天识别环境下识别准确度最低。且在识别过程中,在雪天对白色车辆识别效果最差,其准确率随着测试车辆数量增加而降低,且受到无法很好抵抗外界环境干扰,无法满足不同环境下不同类型车辆识别需求。
而基于卷积神经网络的车辆识别技术识别结果,如表6所示。
分析表6数据,得到基于卷积神经网络的车辆识别技术识别准确率。如图7所示。

表6 基于卷积神经特定路况车辆识别情况

图7 基于卷积神经网络的车辆识别技术识别准确率
分析图7可以看出,基于卷积神经网络的车辆识别技术受不同场景环境影响较小,且对不同类型车辆识别不会受到场景影响,能够较好抵抗外界环境干扰。在较为恶劣环境下,识别结果较为稳定。随着测试车辆数量增加,其识别准确性不会受到外界因素影响,能够有效满足不同环境下不同类型车辆识别需求,从而证明研究有效性。
3 结束语
在大数据技术广泛应用下,智慧交通系统作为精准识别车辆信息的一种重要手段,在基于卷积神经网络的车辆识别技术研究过程中,以卷积神经网络为基础,针对不同环境下车辆进行详细车型识别,提取车辆信息与车辆异常情况,满足实际应用需求。
猜你喜欢
现代电力(2022年2期)2022-05-23
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化·高一版(2021年2期)2021-03-19
电子制作(2019年13期)2020-01-14
电子制作(2019年19期)2019-11-23
电子制作(2019年11期)2019-07-04
电子制作(2019年24期)2019-02-23
领导决策信息(2018年16期)2018-09-27
北京航空航天大学学报(2018年1期)2018-04-20
数学学习与研究(2017年3期)2017-03-09
