
预切种式甘蔗种植机出种系统设计与试验
2020-07-07 09:18:24张泉勇冯大鹏
湖北理工学院学报 2020年3期
张泉勇,文 晟,冯大鹏*,李 涛
(1.湖北理工学院 机电工程学院,湖北 黄石 435003;2.华南农业大学 工程基础教学与训练中心,广东 广州 510642)
0 引言
甘蔗产业在中国国民经济中占有较大比重,是我国重要的经济作物,中国蔗糖约占世界制糖总量的60%左右。近年来,随着全球化进程的推进,美国、巴西等甘蔗种植大国的种植技术机械化程度较高,导致甘蔗种植成本降低,使我国的甘蔗产业受到冲击[1-3]。甘蔗播种是甘蔗产业的关键一环,由于甘蔗种植是一项劳动密集型工作,包括开沟、施肥、排种、覆土、覆膜以及培土等流程。人工种植的效率低,人力成本也逐年提升,因此大力发展甘蔗机械化种植是提高甘蔗产量、降低生产成本的关键[4-8]。
针对当前甘蔗种植机发展的现状以及优缺点[9-12],根据农艺要求设计了一套预切种式地轮驱动式甘蔗种植机,该种植机采用拖拉机牵引,由拖拉机的液压系统作为甘蔗种植机的动力驱动,依次完成开沟、施肥、取种、播种、覆土、覆膜以及培土压实等工序,实现甘蔗的机械化种植,为甘蔗机械化种植机械的设计提供参考。
1 甘蔗种植机结构与工作原理
1.1 方案设计要求
近年来全国推出了 “深耕、浅种、宽行、密植”的甘蔗种植新方法。根据新方法要求,蔗沟需要开宽沟,宽约40 cm,蔗段按照15~25 cm的株距排列,行距90~130 cm,每亩播种的双牙苗蔗种3 000~3 500 个[13-14],蔗沟深度要达到20~40 cm,蔗种回土盖种深度在5~8 cm,其中株距、行距可按照具体地块要求作适当调整[15]。种植机应具有开沟、施肥、取种、播种、覆土、覆膜以及培土压实等功能,根据甘蔗种植的农艺要求,甘蔗种植机需要将蔗段从种箱中自动取出,肥料要在蔗段种植前均匀铺洒在蔗沟中,然后摆放蔗种,最后完成覆土、覆膜以及培土压实等工序。
1.2 甘蔗种植机结构
甘蔗种植机由开沟装置、施肥装置、自动取种装置、覆土装置、覆膜装置和培土装置组成。甘蔗种植机结构简图如图1所示。

1—运输带;2—肥料箱;3—搅拌器;4—开沟器;5—导种槽;6—地轮;7—取种器;8—覆膜架;9—压膜轮;10—回泥轮;11—种箱。
1.3 甘蔗种植机工作原理
机具工作时,首先由开沟器开出种植的沟槽与放置化肥的小沟槽,即蔗沟和旁沟,小沟槽与放置蔗段的沟槽间距为50 cm,将预先切好的25~35 cm的蔗段种子整齐地摆放在种箱中。拖拉机液压系统与种植机的液压电机相连,为施肥搅拌器和输种机构提供动力。行走过程中,液压电机转动带动旋转搅拌器和链轮运动,化肥从肥料箱中排出,通过排肥管施到沟中;同时链轮带动运输带运动,蔗种经取种装置取出后落在刮板上,蔗种顺着导种槽下滑,在导种槽的强制作用下平直地落在蔗沟里;然后回泥轮将垄刮平后覆膜,压膜轮将膜压实,最后由回泥轮将泥土压在膜的边缘。甘蔗种植机依次进行开沟、施肥、取种、播种、覆土、覆膜以及培土压实等工序,完成甘蔗的机械化种植。
2 主要工作部件的设计
2.1 种箱的设计
种箱作为甘蔗种植机的关键部件,种箱要有足够的容量,减少作业过程中的加种次数。种箱的容积大小由播种作业的行程、株距、行距以及种子体积等因素决定。种箱由隔板隔成左右2个部分,工作时,预先将蔗种切成蔗段,整齐摆放在种箱内。种箱的容量计算公式为[16]:
(1)
式(1)中,S为地块长度(m),本研究试验地块长度为36.5 m;l为甘蔗种植机工作的作业幅宽(m),甘蔗种植机幅宽为1.2 m;A为单位面积的甘蔗种植量(kg/hm2),根据国内甘蔗种植作业要求,取6 800 kg/hm2;λ为甘蔗种子的单位容积质量(kg/L)。
种箱分为左右2个部分,所能容纳的蔗段长度最大值为35 cm,为防止蔗段卡在种箱内部,造成出种不畅,甘蔗的平均直径为40 mm,甘蔗切断长度为30 cm左右,蔗段的平均质量为0.36 kg。由公式(1)计算得V=519.185 L,根据实际需要,种箱内部一般会预留5%左右的种子,因此设计种箱容积为600 L,所装蔗段数为3 000段左右。
2.2 自动取种装置的设计
取种装置采用U型槽钩取式取种,主要由步进电机、回转轴、转盘等组成。为保证蔗段在蔗沟中能够按照等距离排列,选用回转式装置安装在种箱出种口,在重力的作用下蔗段依次排列在出种口。当链轮带动托板和刮板运动时,漫反射式光电传感器检测刮板的运动,步进电机驱动回转轴转动,回转轴带动转盘转动一定的角度,从而将蔗段取出放到刮板上。种箱内部蔗段由隔板分成2列,回转轴每转动1次,取出1根蔗段到刮板上。刮板运动到最高点时,蔗种落到导种槽中,在导种槽内部,蔗种转换方向后落到蔗沟中,实现蔗段的均匀播种。其中回转轴分为左、右2部分,2部分的U型槽间隔180°,其中U型槽的宽度为6 cm,深度为8 cm。U型槽结构如图2所示。

图2 U型槽结构
2.3 开沟装置的设计
甘蔗种植机采用隔离式开沟装置,肥料与蔗种分开放置。开沟装置主要由蔗沟开沟犁头、扩沟边板、旁沟开沟犁头、导种板、回泥板等组成。为避免肥料接触蔗段影响蔗种的生长,采用肥料与蔗段分沟的方式,在扩沟边板的尾端各装有一个旁沟开沟犁头,用于开施肥的小沟,蔗沟开沟犁头比旁沟开沟犁头低10 cm,且开沟犁头可上下调节,方便调整蔗沟深度。旁沟与蔗沟中心的理论距离为40 cm,通过上下移动调节肥料槽的深度。工作时,开沟犁将泥土破开,在扩沟边板的挤压下,泥土向两侧分离形成蔗沟,旁犁开出施肥的小槽,同时肥料通过施肥管道均匀地铺洒在小槽底部。排种器排出的蔗段沿着两侧的边板落在蔗沟中,然后在回泥板的带动下,两侧的泥土将蔗段和肥料掩盖。开沟装置结构及工作状态如图3所示。

图3 开沟装置结构及工作状态
3 自动出种控制系统设计
3.1 自动出种控制系统原理
甘蔗种植机自动出种控制系统采用可编程控制器为中央数据处理器,通过漫反射式光电传感器(三线NPN常开,上海迈得豪实业有限公司)检测刮板机构的运动,同时记录相邻2次光电传感器被触发的时间。设定取种机构的工作频率为1~10 Hz,通过计算得知,取种时的最大扭矩为10 N·m,由锂电池(48 V,15 A·h)提供电力。步距角是步进电机保证其加工精度的关键参数,步距角越小,精度越高[17]。因此选择两相混合式步进电机(86HBP150AL4,北京时代超群科技有限公司),扭矩为12 N·m,步距角为1.8°,步进电机转速和旋转的方向由驱动模块(ZD-2HA860,北京时代超群科技有限公司)调节,步进电机安装在U型槽的一端,U型槽的另外一端由轴承支撑。自动出种控制系统结构示意图如图4所示。

1—可编程控制器;2—漫发射式光电传感器;3—步进电机驱动器;4—步进电机;5—电源;6—降压模块;7—U型槽。
甘蔗种植机自动出种控制系统的核心是可编程控制器,主要包括信号处理模块、步进电机控制模块、数模转换模块等。自动出种控制系统的工作流程如图5所示。

图5 自动出种控制系统的工作流程
系统工作时,机车的运动带动刮板运动,漫反射式光电传感器检测刮板的运动,触发光电传感器,光电信号经A/D转换后输入到可编程控制器。光电传感器触发后,电平从低电平变化为高电平,刮板穿过光电传感器的位置后,电平从高电平转换为低电平,可编程控制器连续2次检测到电平变化后发送指令,由步进电机驱动器驱动步进电机转动相应的角度,从种箱中取出蔗段到刮板上,有效减少因停机而导致的出种混乱情况。
3.2 自动出种控制系统仿真
取种机构中相邻刮板之间的距离相等,为防止由于机车速度变化造成蔗种间距发生变化,需要实时调整步进电机的转速,从而控制排出的蔗种间距保持不变。可编程控制器内部的定时计数器,记录2次光电传感器输出信号的时间间隔△t,计算刮板的运行速度,从而调节步进电机的转速。由于系统从接收速度信号到改变转速至目标值存在一定的延滞,为快速调节步进电机转速,采用控制精度高、易于实现、实用性强的闭环控制方法对步进电机的转速进行精确调节,该方法在连续系统的动态特性校正过程中作用明显。
闭环控制方法是通过计算目标值与实际输出值之间的偏差,将偏差的比例(Proportion,P)、积分(Integration,I)、微分(Differentiation,D)通过线性组合作为控制量,对步进电机的转速进行控制,其控制的一般规律为[18]:

(2)
式(2)中,u(k)为采样时刻k控制系统的输出量;KP为比例增益;KI=TKP/TI为积分时间常数;KD=KPTD为微分时间常数;e(k)为采样时刻k系统输出量与输入量的偏差,e(k)=y(k)-r(k),y(k)为输出反馈值,r(k)为参考输入值。
刮板的运行速度作为影响步进电机转速外部关键因素,步进电机的转速调节过程具有延迟和转速惯性的特点,建立二阶自动控制模型,其传递函数为:
(3)
式(3)中,G(s)为步进电机电流与实际转速之间的传递函数;K为反馈信号时的比例常数;T1和T2为时间系数;τ为延迟时间。
根据步进电机调速系统数学模型,运用MATLAB软件(美国MathWorks公司)在给定信号为单位阶跃信号时,利用最优化参数设计的方法对建立的系统传递函数进行闭环控制仿真系数调试,获取最优的控制效果和参数。闭环控制仿真模型如图6所示。

图6 闭环控制仿真模型
经过反复的仿真和试验,确定传递函数中各参数数值为T1=0.0945,T2=1.899,K=1,τ=0.005。在输入为单位“1”的情况下,系统的阶跃响应曲线如图7所示。

图7 系统阶跃响应曲线
由图7可知,将目标速度设定为单位“1”,当未增加闭环控制算法调节时,可编程控制器发出改变信号后,到步进电机开始响应有一定的延滞,转速改变到目标值需要250 ms左右,而且在达到目标转速值后,实际转速值还会在目标值附近波动,与目标值有一定偏差。但是经过闭环控制调节后,响应时间缩短为20 ms左右,同时实际转速到达目标值后就稳定在目标值附近,在一定程度上提高了系统的响应速度和稳定性。
4 田间试验
4.1 试验方案
为验证所设计的甘蔗种植机田间作业环境下的性能,制造物理样机,在广东省广州市增城区华南农业大学教学科研基地进行试机,试验挑选茎秆较直、无病虫害的甘蔗作为蔗种,试验前,将甘蔗切为30 cm左右的蔗段。甘蔗种植机由久保田M704K拖拉机作为牵引机械和液压驱动动力源。选择80 m ×10 m的地块作为试验用地,土壤平均湿度为45%。
试验时,根据拖拉机的行驶路线依次设置4个行程,每个行程长度为40 m。试验过程为测量开沟犁和旁犁开出的沟的形状数据,前3个行程均在拆除回泥板与覆膜装置的前提下进行,在前3个行程内分别记录每个行程的蔗沟和旁沟的沟深、沟宽、株距、漏播株数等。第4个行程为一次完成开沟、施肥、取种、播种、覆土、覆膜以及培土压实等工序。
4.2 试验数据分析
4.2.1取种装置的速度测量
试验时,使用激光转速计测量刮板链轮和取种转盘的转速,共进行3次测量试验,每次测量连续测量5次,求取平均值。取种装置转速测量结果见表1。

表1 取种装置转速测量结果
由表1的数据可知,当链轮转速不同时,光电传感器信号接通时间间隔不同,系统通过闭环控制调节步进电机的转速,取种转盘转速有不同的变化。
4.2.2沟宽和沟深的测量
蔗沟和旁沟的沟宽和沟深是决定甘蔗种植机开沟装置性能的关键参数。
1)蔗沟和旁沟的沟宽测量。试验时,在每个行程内间隔5 m为一个采样点,共选取8个采样点。在每个采样点位置用米尺量取蔗沟和左右旁沟(机车前进方向为前)的沟宽,以及蔗沟中心到左右旁沟中心的间距。前3个行程的蔗沟和左右旁沟的沟宽测量结果见表2。
国家推广的甘蔗种植新技术要求甘蔗种植开宽沟约40 cm,左右旁沟开沟宽度与撒肥管道的直径有关,所设计的甘蔗种植机出肥口管道直径为10 cm,左右旁沟中心线到蔗沟中心线间距为50 cm。试验测量左右旁沟中心到蔗沟中心的距离为46 cm,满足设计要求。由表1的数据可知,甘蔗种植机开出的蔗沟平均沟宽为46.5 cm,左右旁沟的平均沟宽分别为24.1 cm和25.1 cm,3个行程中蔗沟沟宽的变异系数为0.051,左右旁沟沟宽的变异系数分别为0.086和0.123。测量结果表明所设计的甘蔗种植机开沟装置性能良好,沟宽满足甘蔗种植要求。

表2 蔗沟和左右旁沟的沟宽测量结果 cm
2)蔗沟和旁沟的沟深测量。为精确测量蔗沟和旁沟的深度,在每个采样点位置,选取沟形的中心点,以中心点为“0”点,分别在“0”点的左右两侧根据沟宽,按照等距原则依次各选取4个点测量3个行程内蔗沟和旁沟的深度。蔗沟和旁沟的沟深测量结果如图8所示。
由图8可知,蔗沟沟深为26 cm,旁沟沟深为15 cm,沟面轮廓清晰,满足甘蔗种植作业要求。

(a) 蔗沟沟深
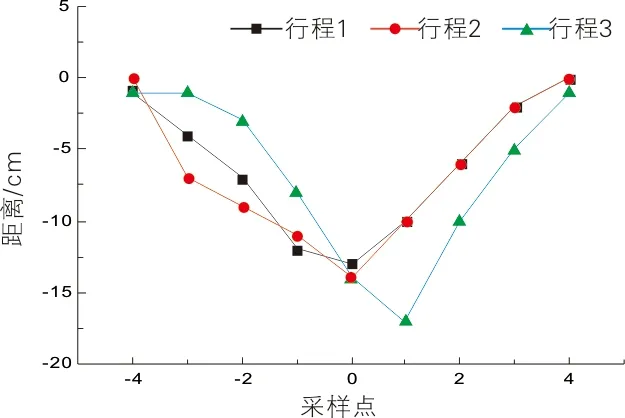
(b) 旁沟沟深
4.2.3甘蔗株距和漏播指数测量
根据甘蔗种植作业要求,每米至少有5~6根甘蔗才能保证甘蔗发芽时每米有10~12个有效种芽[19]。当出现漏播时,对蔗种均匀性影响很大,因此当相邻蔗段端部相距超过0.25 m时即定为漏播[20-21]。
试验时,在各个行程内测量总的蔗段数和漏播的蔗段数,蔗段株距和株数统计见表3,其中漏播指数测定公式为:
(4)
式(4)中,η为漏播率;m为有效测量区域内漏播的蔗段数(株);n为有效测量区域内蔗段总数(株)。

表3 蔗段株距和株数统计
由表3数据可知,所设计的甘蔗种植机在40 m的行程播种作业时,平均株距均在15~25 cm的范围内,并且漏播率维持在6%以内,满足甘蔗种植均匀性的要求。
5 结论
1)甘蔗种植机能够依次完成开沟、施肥、取种、播种、覆土、覆膜以及培土压实等工序,开沟装置开出的蔗沟和旁沟沟形完整,蔗沟沟深为26 cm,旁沟沟深为15 cm,结构参数满足甘蔗种植作业要求。
2)自动出种控制系统采用闭环控制算法对步进电机转速进行调节,能够提高系统的响应速度以及系统的稳定性。
3)田间均匀性试验表明,所设计的甘蔗种植机播种精度高,株距稳定在15~25 cm范围内,漏播率维持在6%以内,满足国家新推出的甘蔗种植要求。
猜你喜欢
儿童故事画报·自然探秘(2022年12期)2022-11-24 10:10:12
机械管理开发(2022年1期)2022-03-24 06:46:28
基层中医药(2021年3期)2021-11-22 08:08:04
建材发展导向(2021年6期)2021-06-09 05:56:48
矿山机械(2021年3期)2021-03-25 07:12:34
中阿科技论坛(中英文)(2021年2期)2021-03-17 02:40:42
农机化研究(2020年2期)2020-10-17 00:59:16
经济技术协作信息(2018年28期)2018-11-22 05:27:06
农机化研究(2018年8期)2018-07-10 11:39:26
特别健康(2018年3期)2018-07-04 00:40:08
