
基于深度学习的重庆街道功能分类研究
2020-07-06 03:28徐小童龚华凤赵聪霄刘庆肖洁
中国科技纵横 2020年2期
徐小童 龚华凤 赵聪霄 刘庆 肖洁
摘 要:为通过深度学习量化城市街道空间构成要素,理解城市街道功能特征,以重庆主城街景为对象,采用机器学习的传统分类法和卷积神经网络分类法搭建模型,再通过深度学习训练模型,形成基于两种分类法的重庆街道功能分类模型。通过比较两种模型分类效果,得出如下结论:(1)分类模型对于场景单一的街道类型分类效果较好;(2)模型的分类能力会受样本量不均衡的影响;(3)卷积神经网络的分类方法整体上略优于传统分类方法。对于如何使用深度学习方法高效研究城市肌理和街道种类有着启发性意义,能够为城市规划设计者准确评价现有街道空间提供科学的量化依据。
关键词:街道分类;卷积神经网络;语义分割;深度学习
中图分类号:TU984.191 文献标识码:A 文章编号:1671-2064(2020)02-0048-02
0引言
街道作为城市格局的关键组成要素,不仅是城市居民日常的活动场所,还是城市文化、历史的重要载体。而街景图作为一种新兴的城市数据源,具有易获取、成本低、样本量大等优点,为城市街道研究提供了新的视角。百度、高德等地图服务API提供了诸如地点检索、路径规划、全景静态图等服务,极大的降低了空间数据的获取门槛。龙灜[1]在2017年提出“图片城市主义”的概念,使城市街景图成为近年来一个热门的研究方向。
目前国外利用图片对城市问题进行量化研究已有不少成功案例,而国内对于城市街景图的研究内容主要集中在城市規划领域对于城市空间各指标的量化方面。如杨俊宴[2]等人利用街景图在内的多源大数据提出南京街道可步行性评价体系。然而,这些评价指标多由研究者自己结合城市特点制定,缺乏统一标准,且不一定适用于其他城市。
综上所述,对于城市街景图的研究,目前主要基于城市空间规划的宏观视角,缺乏更聚焦的专业分析,如道路设计、交通规划等。利用街景图对街道功能进行深度学习,可以提取出肉眼无法概括的街道特征,对街道设计、街道质量提升有着十分重要的借鉴意义。
因此,本文将以重庆主城的街景图为研究对象,完成从收集数据到自定义训练数据集,到搭建合理的街道功能分类模型的完整流程,阐明深度学习技术在城市规划、城市感知中应用的可能性。
1研究对象
1.1研究范围
重庆是典型的山地城市,其独特的地形、组团式的城市发展模式、庞大的城市交通系统赋予了重庆街道复杂多样的使用功能,有极大的研究价值。然而,目前对以重庆为代表的大型山地城市大规模的街道研究却非常匮乏。因此,本文的街景研究对象为重庆市中心城区。主要涉及渝中区、沙坪坝区、江北区、渝北区、九龙坡区等这八个行政区,研究面积约为850km2。
1.2研究数据
1.2.1数据获取
考虑到百度地图在街景覆盖率、时效性、图片质量等方面的优势,本文选择以百度地图API提供的街景图服务为基础,展开数据收集的工作。根据百度服务文档,以取得最佳街景视角为原则,确定获取街景图所需的长度、宽度、坐标、坐标类型等参数。为保证图片的质量,本文获取的街景图片长度和宽度均取最大值;垂直视角取0°,水平方向范围取180°,这既保证了最佳视觉范围,也避免了图片失真问题;在GPS坐标系下,计算求得每个采样点的坐标位置和道路方位角。
本文获取的街道总长度约2496km,以100m为间隔进行取样,最终收集到23083个有效的采样图片。
1.2.2数据分类
对街道类别的精细化研究,有着重要的意义,比如分析街道功能对人们日常活动的影响,比如根据街道使用功能,有针对性的量化街道空间品质。街道分类需结合街道包含的要素、主要使用场景,以及地理位置附近的用地特征等因素,并结合城市特有属性。《旧金山美好街道设计》基于以上原则,将旧金山的街道分为商业性街道、居住性街道、产业型街道、混合用地街道和特殊街道。类似的,《上海市街道设计导则》[3]则综合考虑了沿街活动、街道空间景观特征和交通功能等因素,将街道划分为商业街道、生活服务街道、景观休闲街道、交通性街道与综合性街道这五大类型。
本文观察获取的所有街景图片,结合场景要素,及其地理位置附近的用地特征,并参考旧金山和上海的街道设计案例,最终将所有街景图按照街道的使用功能分为了交通型街道、商业型街道、生活服务类街道、景观休闲类街道等12个类别。经统计,生活服务类的街道数量最多,比例为37.18%,其次是交通性街道和小区内部街道,比例分别为23.45%和12.81%。
2研究方法
本文将分别通过传统图片分类和卷积神经网络这两种方法对街景图反映的街道功能进行分类。对于传统的机器学习方法,本文首先通过语义分割模型,将街景数据从图片像素级的二维数据转换为构成要素级的一维数据,然后将不同要素作为变量,构建不同分类算法,并比较分类结果。对于卷积神经网络算法,本文首先搭建卷积神经网络框架,并不断训练优化,最终建立了在训练集和验证集上均表现良好的网络结构。
2.1传统机器学习
2.1.1语义分割
语义图像分割是一种图像识别任务,目的是为图像中的每个像素点指定一个语义标签,如道路、人行道、建筑物等。DeepLab是谷歌开源的用于图像语义分割的一系列深度学习模型,目前来说,DeepLabv3已有较高的准确度。本文采用预训练好的DeepLabv3模型对获取的街景图进行语义分割,并统计每种街景构成要素的语义标签数量,最后计算街景图构成要素的面积占比。
由语义分割的统计结果可知,不同的街道类型对应的构成要素占比均有所不同。例如,对于交通性的街道,天空的比例是最高的(均值约42%);对于商业性质的街道,建筑的构成比例最高(40%左右);而对于景观性质的街道,植被和天空的占比相对较高,分别为61%和21%。
2.1.2分类器搭建
根据语义分割的结果,求得每张图片要素的面积占比,包括道路、人行道、建筑等共计19类构成要素,将其作为自变量。将图片对应的街道类别,包括交通性街道、商业街道、生活服务街道等共计12类街道类型,作为因变量。调用基于Python编程语言的scikit-learn机器学习模块,构建五种常见的分类器,分别是逻辑回归、K-近邻、支持向量机、随机森林、梯度提升树。
对于每种分类器,均按照每类样本的比例,按8:2的比例随机抽取训练集和测试集。对于训练集,使用交叉验证的方法,验证次数取10次,得到训练模型的评价准确度;对于测试集,将拟合好的模型用于测试,生成精确率、召回率和F1值等评价指标。详细的分类结果见实验结果一节。
2.2卷积神经网络
2.2.1网络搭建
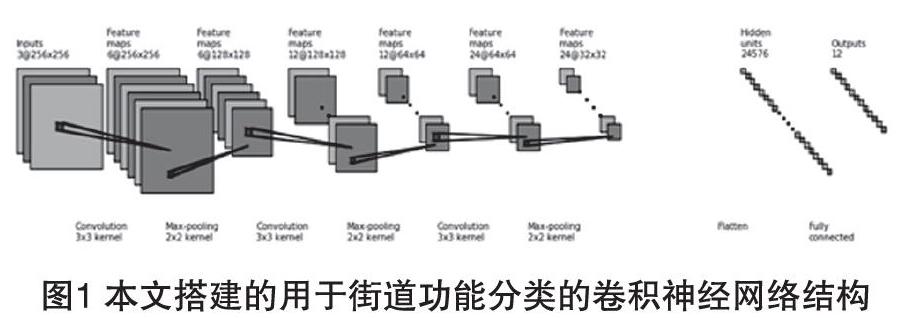
本文搭建的用于街道功能分类的卷积神经网络包括三个卷积层,每个卷积层后面分别连接一个池化层,最后通过全连接层与分类器进行连接,得到分类结果(图1)。
2.2.2模型訓练
本实验将样本按7:3的比例划分为训练集和测试集,在测试集上的平均准确率为96%,对于每种类别的街道类型,精确率均达到90%以上。在测试集上进行模型测试,测试结果详见实验结果一节。
3实验结果
对于传统分类方法,由交叉验证的结果可知,五种分类器的平均准确率均在六成左右。就单个类型的精准率而言,五种分类器对于隧道类街道的识别能力是最强的,其中,逻辑回归方法的精确率(98%)最高。此外,逻辑回归方法对于景观休闲类和B类商业街道的识别能力也非常好,精确率分别为91%和91%。对于交通性街道、生活服务型街道和小区内部街道,五种分类器的水平相差不大,保持在50%到66%之间。
就卷积神经网络在测试集上的表现来看,该网络对隧道类的分类能力最强,精确率为96%,经分析,主要原因是该类别的场景要素较为简单,相比于传统分类方法,卷积神经网络能更好的进行特征提取;其次为交通性街道,精确率接近70%;对于B类商业街道、生活服务类街道、小区内部街道和景观休闲类街道而言,精确率在60%左右;对于其余街道类型,如偏远乡镇街道、建设中的街道、工业产业类街道等,该网络的分类表现欠佳。
综上所述,两种分类方法在几种特定的街道类型上均有不错的表现,精确率均在90%以上。而且卷积神经网络分类方法要略优于传统分类方法,主要原因是卷积神经网络对于场景要素相对单一的街道类型(如交通性街道、景观休闲类街道等)有更强的特征提取能力。对于场景要素较复杂的街道类型,两种方法的分类能力有所下降。经分析,生活性街道、小区内部街道和休闲景观街道这三种类型的街道之间具有一定的相似性,而且场景要素比较复杂多变,这极大的减弱了模型的分类能力,导致分类表现一般。
4结语
本文尝试从街道功能的视角对重庆市主城区的街景图进行研究,具有一定的前瞻性和开创性。通过对重庆市主城区街道的功能划分,本文利用深度学习技术建立了可行的街道类型的分类方法,并验证了可行性。通过街道分类结果,城市规划者可以更有针对性地量化街道空间特征,改善街道空间品质。然而,本文提出分类器在复杂场景和样本不均的情况下的分类能力有待进一步改进。
综上所述,本文通过深度学习的方法对街道功能进行分类,把城市街道研究与新技术相结合,量化街景要素,定义街道功能。本文的研究方法有助于利用计算机提取人无法概括的街道特征,从而帮助道路交通设计者更好的理解街道,为城市规划者提供更有效的街道品质提升方案,辅助科学决策。
参考文献
[1] 龙瀛,周垠.图片城市主义:人本尺度城市形态研究的新思路[J].规划师,2017,33(02):54-60.
[2] 杨俊宴,吴浩,郑屹.基于多源大数据的城市街道可步行性空间特征及优化策略研究——以南京市中心城区为例[J].国际城市规划,2019,34(05):33-42.
[3] 上海市规划和国土资源管理局,上海市交通委员会,上海市城市规划设计研究院主编.上海市街道设计导则[M].上海:同济大学出版社,2016.
猜你喜欢
科技创新与应用(2016年35期)2017-02-21
计算机应用(2016年12期)2017-01-13
江苏教育·中学教学版(2016年11期)2016-12-21
新教育时代·教师版(2016年23期)2016-12-06
法制与社会(2016年32期)2016-12-01
