
基于JT/T 1242-2019的AEB测试研究
2020-07-06 05:51黄超智龙军周金应李可
公路与汽运 2020年3期
黄超智, 龙军, 周金应, 李可
(中国汽车工程研究院股份有限公司, 重庆 401122)
随着居民生活水平的日益提高,汽车保有量不断提升,道路交通量快速增长,特别是高速公路交通量持续高位运行,造成交通事故频发,给社会带来巨大经济损失和人员伤亡。为降低交通事故发生的可能性,越来越多的主动安全系统在汽车上推广应用,自动紧急制动(Autonomous Emergency Braking,AEB)系统便是其中之一。欧盟新车安全评鉴协会Euro NCAP的研究结果表明,AEB能有效避免27%的碰撞事故。
1 AEB标准法规要求
汽车安全要求的日益严格,使AEB逐渐成为汽车标配。欧盟商用车自2013年11月起必须按照法规要求装配AEB系统,Euro NCAP于2014年正式将AEB纳入新车安全评价加分项中。
中国GB 7258-2017《机动车运行安全技术条件》要求车长大于11 m的公路客车和旅游客车装备符合标准规定的车道保持辅助系统和AEB系统,该条款自2021年1月1日起对所有新定型车辆实施。为进一步提升营运车辆的安全技术水平,交通运输部于2016年12月30日发布JT/T 1094-2016《营运客车安全技术条件》,要求车长大于9 m的营运客车装备符合JT/T 883规定的车道偏离预警系统(LDWS)和自动紧急制动系统(AEBS),该条款对于AEBS的要求于2019年4月1日起开始对所有新生产车型实施。2018年2月26日发布的JT/T 1178.1-2018《营运货车安全技术条件 第1部分:载货汽车》规定,总质量大于或等于12 000 kg且最高车速大于90 km/h的载货汽车应安装AEBS,该条款将于2021年5月1日起实施。2019年3月15日发布的JT/T 1178.2-2019《营运货车安全技术条件 第2部分:牵引车辆与挂车》规定,最高车速大于或等于90 km/h的牵引车辆应安装AEBS,AEBS的性能应符合JT/T 1242-2019《营运车辆自动紧急制动性能要求和测试规程》的规定,该条款将于2021年5月1日起实施。
交通运输部于2019年4月1日开始实施JT/T 1242-2019,目前营运车辆AEB测试均按该标准执行。该文针对JT/T 1242-2019规定的测试工况构建AEB测试系统并开展实车测试,为后续相关测试的开展及标准完善提供借鉴。
2 AEB原理概述
AEB是一种通过自动制动来避免或缓解碰撞的主动安全技术,主要由测距、数据分析和执行机构三大模块构成。其中:测距模块主要用于获取周边交通状况,包含单/双目摄像头、毫米波雷达、激光雷达等多种传感器;数据分析模块根据传感器获取的数据实时判断与前方车辆或行人发生碰撞的可能性,计算距离小于等于报警距离时通过声音、图像等对驾驶员发出报警提示,计算距离小于安全距离时自动采取刹车制动。
如图1所示,AEB系统在t0时刻感知到前方目标;车辆行驶到t1时刻,如果驾驶员未进行较强制动,AEB系统将发出声光报警信号,并预先填充制动系统;t2时刻,如果驾驶员仍未进行紧急制动或避让,AEB系统将限制发动机扭矩进行短时紧急制动,目的是给驾驶员进行触觉报警;t3时刻,如果驾驶员仍未采取避免碰撞措施,AEB系统计算出碰撞危险程度已达到临界制动点,系统会自动全力制动以避免或缓解碰撞。
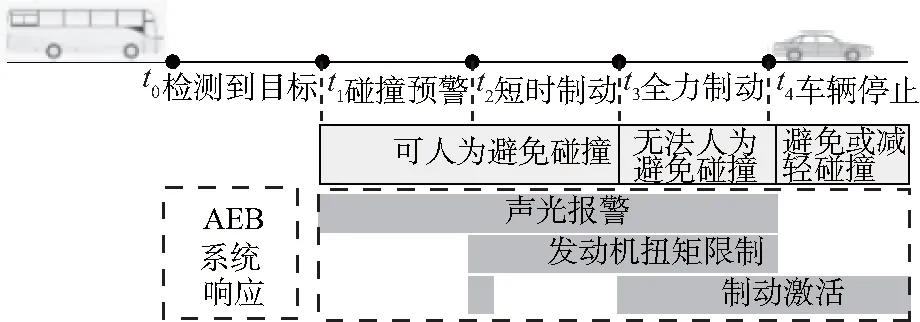
图1 AEB系统的工作过程
3 典型AEB道路测试工况及评价方法
JT/T 1242-2019中规定了目标检测距离、目标检测宽度、目标车辆静止、目标车辆移动、弯道横向目标识别、误响应、行人和车路通信8种道路测试工况,各工况的评价指标见表1。
3.1 目标检测距离测试
目标车辆静止且与被测车辆方向一致,被测车辆距离目标车辆200 m时开始测试,测试中被测车辆与目标车辆的中心线偏差不超过被测车辆宽度的±20%。被测车辆与目标车辆发生碰撞或与目标车辆距离小于2 m且无法探测到目标车辆时,结束测试。
3.2 目标检测宽度测试
目标车辆静止且与被测车辆方向一致,被测车辆位于车道中心线,被测车辆与车道中心线偏差不超过被测车辆宽度的±20%。左侧检测宽度测试时,目标车辆左侧车辆压被测车辆左侧车道线;右侧检测宽度测试时,目标车辆右侧车辆压被测车辆右侧车道线。被测车辆距离目标车辆200 m时测试开始,距离小于150 m时测试结束。
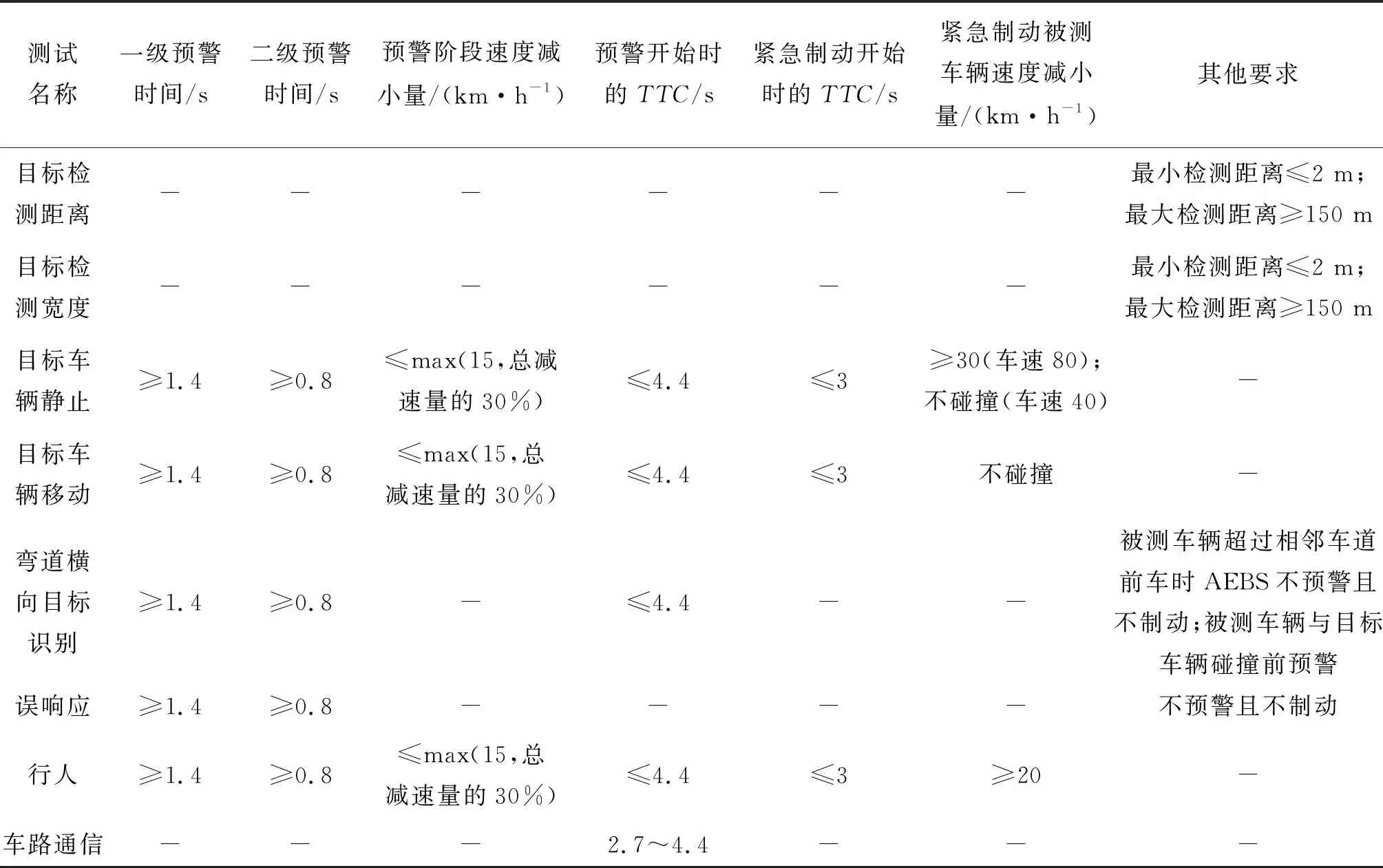
表1 AEB道路测试主要评价指标要求
注:TTC为被测车辆与目标障碍物在t时刻发生碰撞所需时间,TTC=车间距离/(被测车辆速度-目标车辆速度);紧急制动阶段为被测车辆以至少4 m/s2的减速度开始减速的阶段。
3.3 目标车辆静止测试
目标车辆静止且与被测车辆方向一致,被测车辆分别以40和80 km/h的速度行驶,距离目标车辆150 m时开始测试,车速误差保持在±2 km/h,被测车辆与目标车辆的中心线偏差不超过被测车辆宽度的±20%。被测车辆与目标车辆发生碰撞或避免碰撞时,结束测试。
3.4 目标车辆移动测试
目标车辆静止且与被测车辆方向一致,被测车辆和目标车辆分别以80和12 km/h的速度沿车道中心线直线行驶。被测车辆距离目标车辆150 m时开始测试,被测车辆和目标车辆的速度误差均保持在±2 km/h,被测车辆与目标车辆的中心线偏差不超过被测车辆宽度的±20%。
3.5 弯道横向目标识别测试
测试道路为曲率半径为250或150 m的弯道。曲率半径为250 m时,被测车辆、相邻车道前车和目标车辆均以大于等于50 km/h的速度同方向行驶;曲率半径为150 m时,被测车辆、相邻车道前车和目标车辆均以大于等于40 km/h的速度同方向行驶。被测车辆和目标车辆在同车道行驶,相邻车道前车在目标车辆外侧车道行驶,车间距离不会触发预警。开始测试后,相邻车道前车将速度降至25 km/h以下,被测车辆超过相邻车道前车时AEBS不应预警且不发生制动。然后目标车辆将速度降至被测车辆发生碰撞预警的速度,测试结束。测试开始前,3台车辆的速度误差至少2 s保持在±3 km/h;测试开始到结束,被测车辆的速度误差保持在±3 km/h(见图2)。

图2 弯道横向目标识别测试示意图
3.6 误响应测试
被测车辆以50 km/h的速度匀速行驶至少60 m后穿过2辆静止的前车。2辆前车车头方向与被测车辆一致,车身间距为4.5 m,车辆尾部处于同一平面。被测车辆的速度允许误差为±2 km/h,2辆静止前车的横向和纵向距离允许误差均为±0.1 m。
3.7 行人测试
测试开始时,被测车辆沿预定车道中心线(B-B)加速至60 km/h并稳定车速,同时控制行人从被测车辆车道中心线左侧6 m处沿A-A路径运动,行人的加速距离F为1.5 m。被测车辆与行人的碰撞点为L,行人距离L点4.5 m时应达到8 km/h的目标速度。如果被测车辆AEBS自动制动或产生碰撞,则结束测试(见图3)。
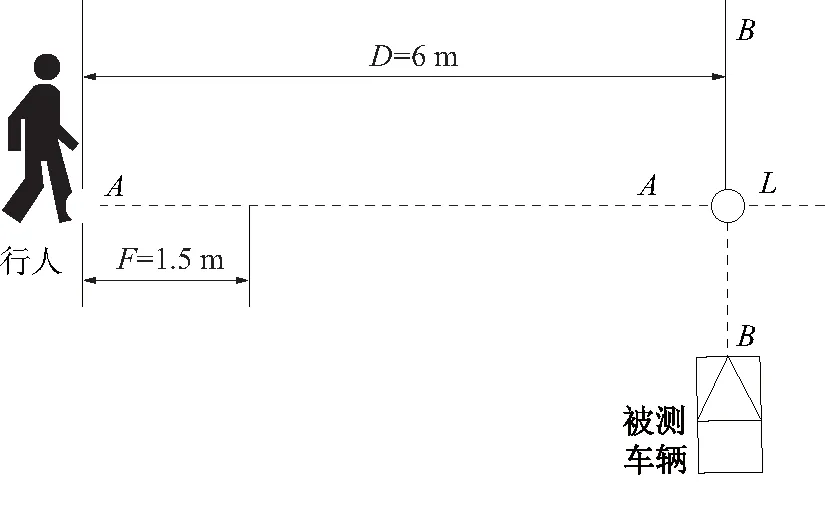
图3 行人测试示意图
3.8 车路通信测试
测试道路路侧单元以10次/s的频率广播发送障碍物状态信息,被测车辆以72 km/h的速度匀速行驶,距离模拟地理位置至少150 m时开始测试。测试过程中,被测车辆的速度误差保持在±2 km/h,被测车辆的中心线偏差不超过被测车辆宽度的±20%。
4 AEB测试系统及测试场景构建
4.1 AEB测试系统构建
AEB测试系统测量被测车辆和目标车辆的速度、减速度、相对距离等参数,具有较高的精度要求。为保证测试的可靠性和重复性,采用专业的测试设备进行测试。目前国内AEB测试主要通过VBOX系统或驾驶机器人系统完成,VBOX系统安装及操作相对简单,但无法进行行人测试。为提高测试效率,除行人测试采用驾驶机器人系统外,其他测试均采用VBOX系统。
VBOX测试系统主要由VBOX 3i RTK、固定基站、基站通信模块、双车通信模块、PC端等构成(见图4)。其中:VBOX 3i RTK为数据采集单元,是VBOX 3i双天线的支持RTK的版本,其采样频率最大为100 Hz。VBOX 3i RTK带有文件管理器,通过文件管理器可更改动态模式和滤波器设置、设置滑移角数据并定义天线位置等。固定基站基于差分技术并通过通信天线和基站通信模块实时发送位置校准信息,使VBOX 3i RTK获得±2 cm的位置精度。双车通信模块可将目标车辆的位置、车速等参数传输给被测车辆。
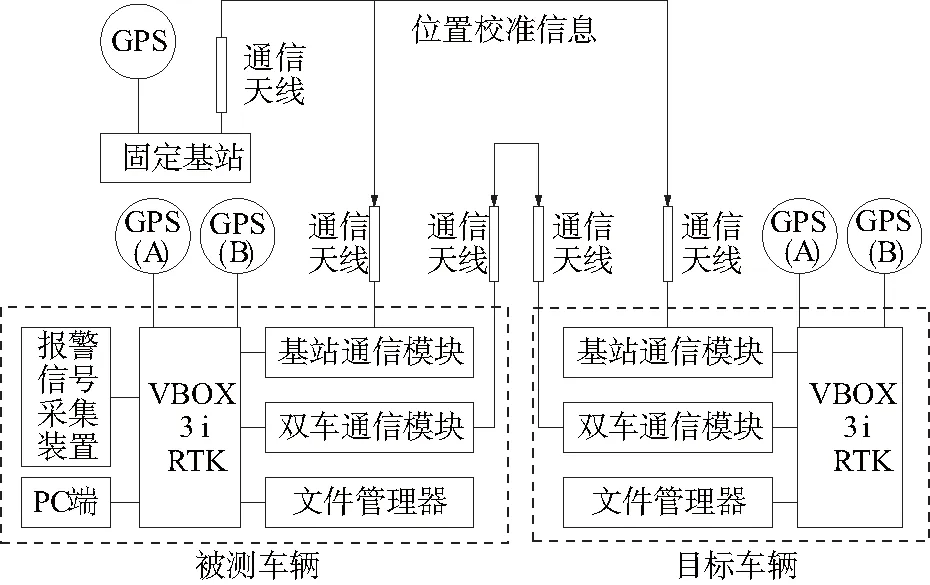
图4 VBOX测试系统的基本架构
驾驶机器人测试系统主要由驾驶机器人、RT 3002、RT Range、固定基站等组成(见图5)。其中:驾驶机器人用于操纵车辆或假人运动,其控制器使用美国PMAC运动控制板卡,等同于一个三轴伺服电机系统,可通过调节比例-积分-微分(PID)控制其运动执行精度。RT 3002配合固定基站使用,固定基站通过无线通信向RT 3002实时提供位置校准信息,RT 3002向驾驶机器人提供定位、导航等信息。RT Range包括Hunter和Target两种,Hunter安装于被测车辆,Target安装于目标车辆或行人系统。RT Range可将目标车辆或行人的位置、速度等实时传输给被测车辆并计算与目标车辆或行人的横向距离、纵向距离、TTC等参数。
最终搭建的AEB测试系统见图6。
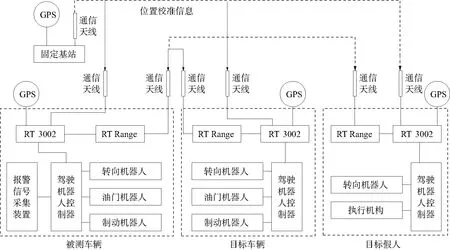
图5 驾驶机器人测试系统的基本架构

图6 AEB测试系统
4.2 AEB测试场景构建
目前AEB系统基本为Ⅰ类系统,不具备车路通信功能,且目标检测距离测试和目标检测宽度测试不需要额外仪器进行数据采集,弯道横向目标识别测试和误响应测试仅为功能性验证测试。因此,仅对目标车辆静止测试、目标车辆移动测试和行人测试进行说明。
目标车辆静止测试场景构建见图7。为保证测试的安全性,测试中采用软性目标车辆,其视觉、雷达和反射量属性与实际M1类车辆相同。软性目标车辆处于基准点位置,被测车辆和软性目标车辆处于同一测试车道,被测车辆位于软性目标车辆后部一定距离,分别进行40、80 km/h车速下的测试。

图7 目标车辆静止测试场景
目标车辆移动测试场景构建见图8。软管用于连接移动拖车和软性目标车辆,目标车辆的测试设备安装于移动拖车上,碰撞基准点设置于软性目标车辆尾部。测试过程中,由拖车拖动软性目标车辆以12 km/h的速度行驶,被测车辆试验速度为80 km/h。

图8 目标车辆移动测试场景
行人测试场景构建见图9。目标假人固定于移动平台,移动平台随张紧带运动,张紧带通过转向机器人进行驱动。通过驾驶机器人设置行人移动速度、行走路径等信息,对被测车辆进行60 km/h速度下的试验。

图9 行人测试场景
5 AEB实车测试
5.1 试验车辆
选取某M3类客车进行试验。该客车搭载由某款77 GHz毫米波雷达和某款单目摄像头构成的AEB系统,该系统的工作速度为15~90 km/h。试验车辆的基本参数见表2。
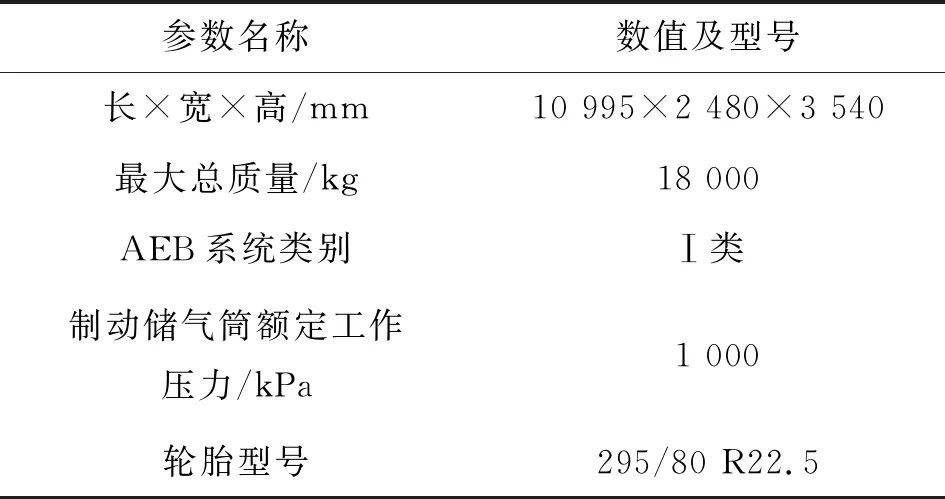
表2 试验车辆的基本参数
5.2 测试结果分析
根据所构建的测试系统和测试场景对试验车辆进行目标车辆静止、目标车辆移动和行人测试。
目标车辆静止测试结果见图10和表3。被测车辆以40 km/h的速度匀速接近静止的目标车辆,TTC为3.4 s时,产生碰撞预警,紧急制动前2.1 s产生一级预警,紧急制动前1.4 s产生二级预警,预警阶段速度减小量为8.5 km/h;TTC为1.8 s时,AEB系统控制被测车辆进行紧急制动,未与目标车辆发生碰撞。

图10 目标车辆静止测试结果
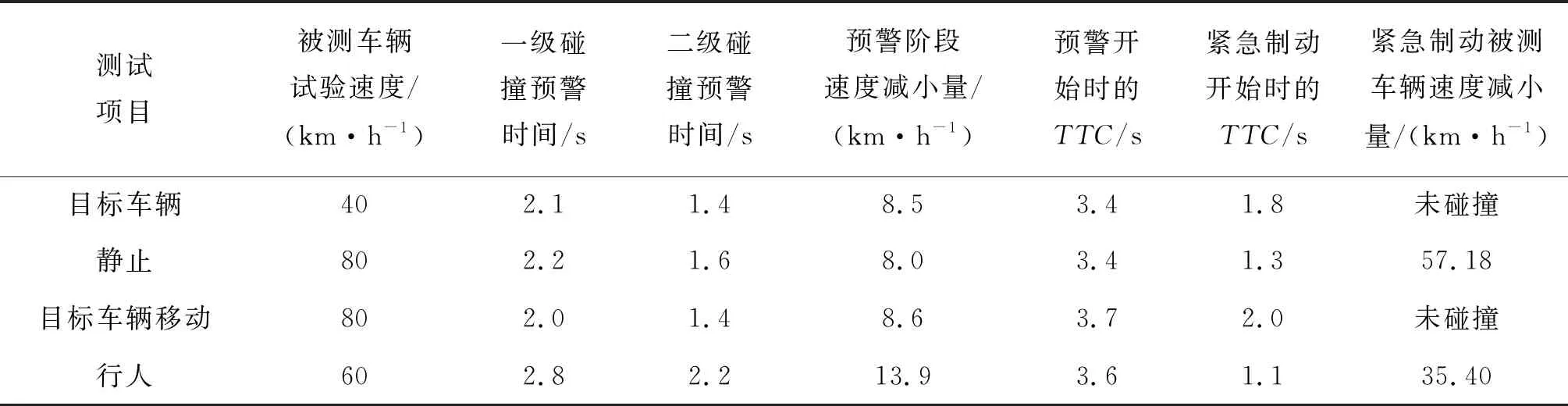
表3 AEB实车测试结果
目标车辆移动测试结果见图11和表3。目标车辆以12 km/h的速度匀速直线行驶,被测车辆以80 km/h的速度匀速接近。TTC为3.7 s时,产生碰撞预警,紧急制动前2.0 s产生一级预警,紧急制动前1.4 s产生二级预警,预警阶段速度减小量为8.6 km/h;TTC为2.0 s时,AEB系统控制被测车辆进行紧急制动,未与目标车辆发生碰撞。

图11 目标车辆移动测试结果
行人测试结果见图12和表3。TTC为3.6 s时,产生碰撞预警,紧急制动前2.8 s产生一级预警,紧急制动前2.2 s产生二级预警,预警阶段速度减小量为13.9 km/h;TTC为1.1 s时,AEB系统控制被测车辆进行紧急制动,被测车辆速度减小量为35.4 km/h。

图12 行人测试结果
6 结语
该文根据AEB系统配置要求和JT/T 1242-2019规定的典型测试工况搭建VBOX系统和驾驶机器人系统两种AEB测试系统,通过构建目标车辆静止、目标车辆移动和行人等测试场景,对某客车的AEB系统进行测试,结果表明该车辆AEB系统满足标准要求。后续研究中,应对频繁随意变道、急加速急减速、车辆与电瓶车碰撞等中国特有事故场景下的AEB性能进行测试,为标准完善提供借鉴。
猜你喜欢
卫星应用(2021年11期)2022-01-19
科学大众(2021年9期)2021-07-16
意林(2021年5期)2021-04-18
中国交通信息化(2020年11期)2021-01-14
今日农业(2019年12期)2019-08-13
扬子江(2019年1期)2019-03-08
现代园艺(2017年22期)2018-01-19
小天使·一年级语数英综合(2017年6期)2017-06-07
汽车与安全(2016年5期)2016-12-01
火控雷达技术(2016年3期)2016-02-06
