
模糊PID控制策略液压混合动力车辆研究
2020-07-06 06:31李腾忠吴相稷
昆明冶金高等专科学校学报 2020年1期
周 鹏,李腾忠,李 源,杨 静,吴相稷
(1.昆明冶金高等专科学校电气与机械学院,云南 昆明 650033; 2.昆明理工大学交通工程学院,云南 昆明 650500)
0 引 言
现今,汽车产业的发展面临环境污染和化石燃料的匮乏两大困境。21世纪汽车技术在节能和环保上的突破,将是重大研究发展方向[1-2]。纯电驱动汽车和油电混合动力汽车由于在电池及车辆续航里程上存在技术问题,再加上电池的后处理技术还有待解决,难以满足汽车产业可持续发展的要求[3]。液压混合动力汽车(Hydraulic Hybrid Vehicles,HHV)作为全新一代清洁能源车辆,拥有2个及以上能量生成装置,用蓄能器代替电池作为辅助动力源,与内燃机有效组合,通过对多动力源的控制策略管理,优化组合,能够适应车辆运行全工况,提高整车燃油经济性。
文献[4]通过对当前汽车节能减排方案的研究,简要介绍HHV车辆,论述其HHV的优缺点,提出规则控制策略,通过设置4种工作模式,分析车辆动机最优经济运行区域。文献[5]介绍了一种模糊控制策略的液压混合动力汽车的研究,但由于在仿真循环中的某些特殊工况,模糊逻辑的判断过于平缓,导致其车速失真,从而使车辆的经济性降低。
传统规则PID控制[1-2],限于精度的要求,虽然控制器简单,但在实际运行中控制参数不变,不能与实时变化的工况相适应。模糊控制尽管可以解决在极限工况下的特殊变化,但其模糊程度过大,也导致控制精度在某些工况时大大低于预期。基于这2种控制策略的优劣互补及各自局限特性,本文研究设计了一种模糊PID控制策略,建立模糊PID控制,以期实现良好的燃油经济性,达到节能减排的目的。
1 规则PID控制和模糊控制
1.1 规则PID控制
传统规则PID(Proportional Integral Derivative)控制,是比例、积分、微分并联的协调控制,组成部分包括模拟控制和被控对象(图1)有着简单的结构(比例、积分、微分参数间调整),明确的物理涵义,较好稳定性等优势,对于数学模型确切或被控对象数学模型易建立的系统,尤其适用。
在工业、科技实际应用中,被控对象往往表现为非线性、时变性特点,数学模型难以精确建立,规则PID控制较难达到理想控制目的,不利于规则PID控制的广泛应用。
1.2 模糊逻辑控制
模糊逻辑控制(Fuzzy Logic Control),作为一种高级的算法策略,通过模糊控制语言来表达及实现人们复杂思维的变化,具有数学模型的表达被控对象的模糊性、与人类的思维方式相类似和容易建立模糊规则、较好的鲁棒性等特点。模糊控制的结构组成如图2所示。
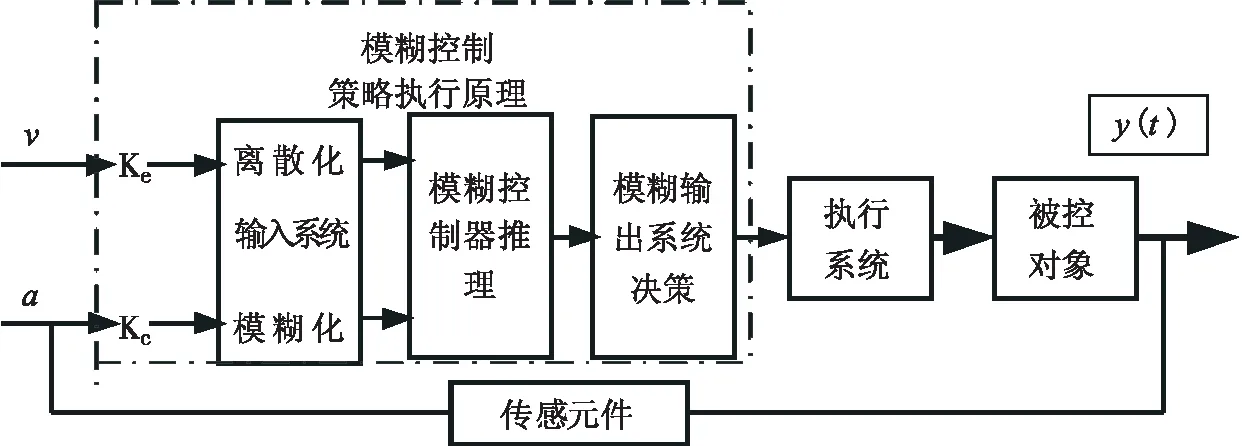
图2 模糊逻辑控制策略执行原理Fig.2 Execution principle of fuzzy logic control strategy
尽管模糊控制与基于规则PID控制相比,已经有了很大的发展,但仍借助经验与模拟方式对系统分析、设计;作为一种非线性的控制,还会出现规则移除问题,故其控制模型不能过于复杂或繁琐。另外,作为一种模糊试凑方法,会产生精确控制模型的被控对象,稳定性较差,容易发生控制系统的激荡问题,尤其模糊语言规则设计不足以覆盖系统变化范围领域时,此问题更为突出。
1.3 模糊PID逻辑控制
由于规则PID控制和模糊控制都有其应用的局限性(文献[4]研究了基于规则的控制策略对液压混合动力汽车性能分析;文献[5]研究了模糊控制策略对液压混合动力汽车的整车性能),各种对规则PID控制的修正控制也不能满足实际控制需求,因此,笔者将非线性的模糊控制与适宜精确数学模型的规则PID控制相结合,以提高液压混合动力汽车的性能。
2 模糊PID控制策略设计
2.1 模糊控制器
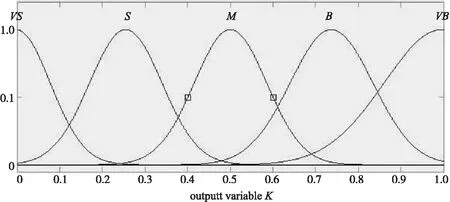
图3 控制车辆状态决定因子K隶属度函数Fig.3 Control vehicle state determining factor K membership function
将仿真车速(目标车速与实际车速之差的绝对值)误差和车速变化率作语言变量输入模糊控制器,设定它们在模糊集上的论域变化是:
v={0,1,2,3,4,5};α{0,1,2,3,4,5};
车速v误差和车速变化率α在模糊集上的论域:
v{零(0),很小(VS),小(S),中(M),大(B),很大(VB)};
α{零(0),负小(NB),负小(NS),中(M),正小(PS),正大(PB)}。
控制车辆状态决定因子K的论域:
K={VS,S,M,B,VB};
相应的决定因子K的隶属度函数如图3所示。
2.2 规则库表
为使得模糊PID控制系统有良好的稳定性、精确灵敏的响应和稳态可持续精度,建立了模糊PID控制规则库表(表1)。
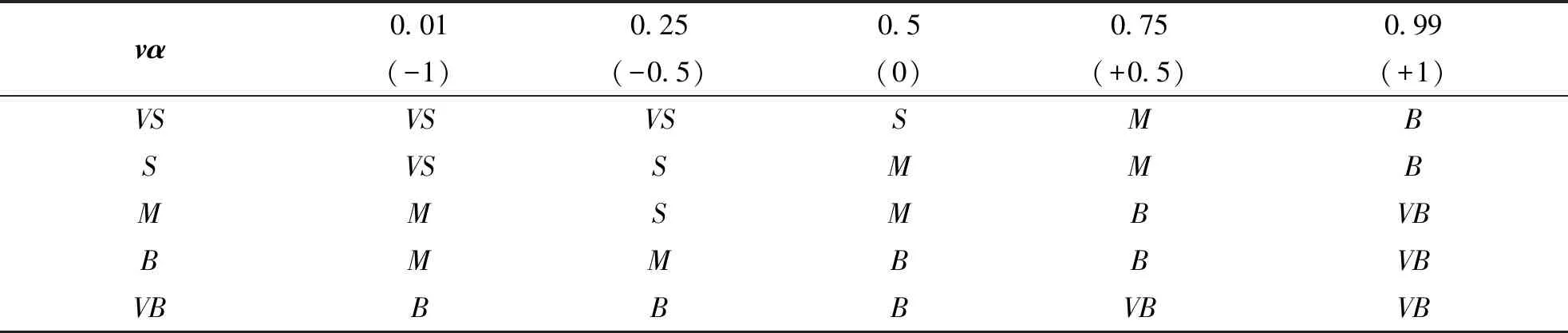
表1 模糊规则库表Tab.1 Fuzzy rule base table
2.3 模糊PID控制策略设计
根据仿真车速误差和车速变化率,模糊控制推理规则库,判断模糊控制车辆状态决定因子K的值,最后经过去模糊化程序,输出确定PID控制量KP、KI、KD,各控制量的被设定归一为(0,1)。模糊PID控制策略原理如图4所示。
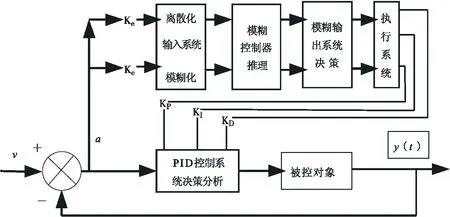
图4 模糊PID控制策略执行机理Fig.4 Execution mechanism of fuzzy PID control strategy
3 仿真验证
在Matlab/Simulink的模糊控制模块Fuzzy下模糊PID仿真模型,仿真验证选用国际通用重型汽车(车辆总质量15 t左右),在城市工况下运行(因重型车辆的城市工况比郊外路况燃油经济性更差,其节能减排的研究更具现实意义),FUDS(Federal Urban Driving Schedule)仿真模型如图5所示。其中,Fuzzy Control为模糊控制模块;PID Control 为PID参数整定模块;最终输出车辆状态决定因子(Vehicle Status Parameter)K,控制被控对象完成车辆运行状态。
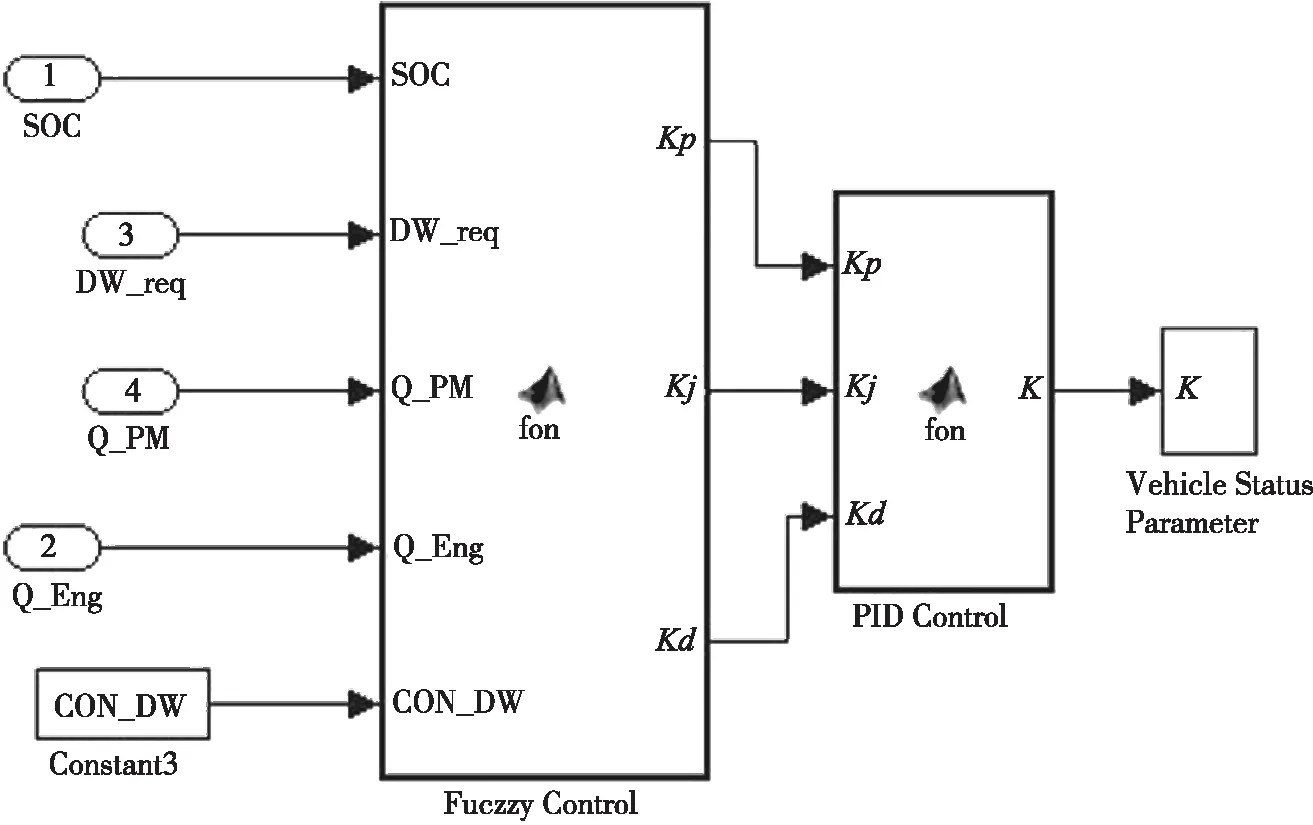
图5 模糊PID控制策略Simulink执行原理Fig.5 Execution mechanism of fuzzy PID control strategy Simulink
3.1 模糊PID控制策略下HHV汽车发动机扭矩工作点分布
图6为模糊PID的控制策略下,应用于整车控制中的HHV汽车发动机在全工况下的扭矩工作点分布情况。
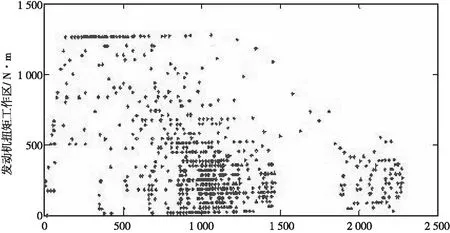
图6 模糊PID控制策略发动机扭矩工作点分布 Fig.6 Engine torque operating point distribution of fuzzy PID control strategy
可以看到,发动机扭矩在300~800 Nm分布较多(符合重型车辆的功率驱动负载需求),仅在少数极变工况下(如急加速或紧急制动等),扭矩工作点会超过 1 000 Nm 或低于100 Nm,在本仿真研究中是允许的。故多数的运行时间中,发动机扭矩工作点沿最佳燃油经济性曲线运行,所设计的控制策略是有效的。
3.2 动力源(发动机和蓄能器)功率分配切换
作为传统燃油汽车,发动机供给整车行驶的所有能量(除启动时蓄电池电能),在车辆制动过程中,车辆制动的动能转换为热能,分散于所处环境中。
在模糊PID的控制策略下,本液压混合动力汽车,不仅能将制动动能回收于双向变量马达(P/M)泵工况,给蓄能器充压,还可使动力源(发动机)运行于高效区域;在加速、上坡等高负载工况下,将蓄能器的存压用于驱动车辆工作。其动力源(发动机和蓄能器)功率分配模式原理如图7所示,其中SOC(State of Charge)为蓄能器存压参数。
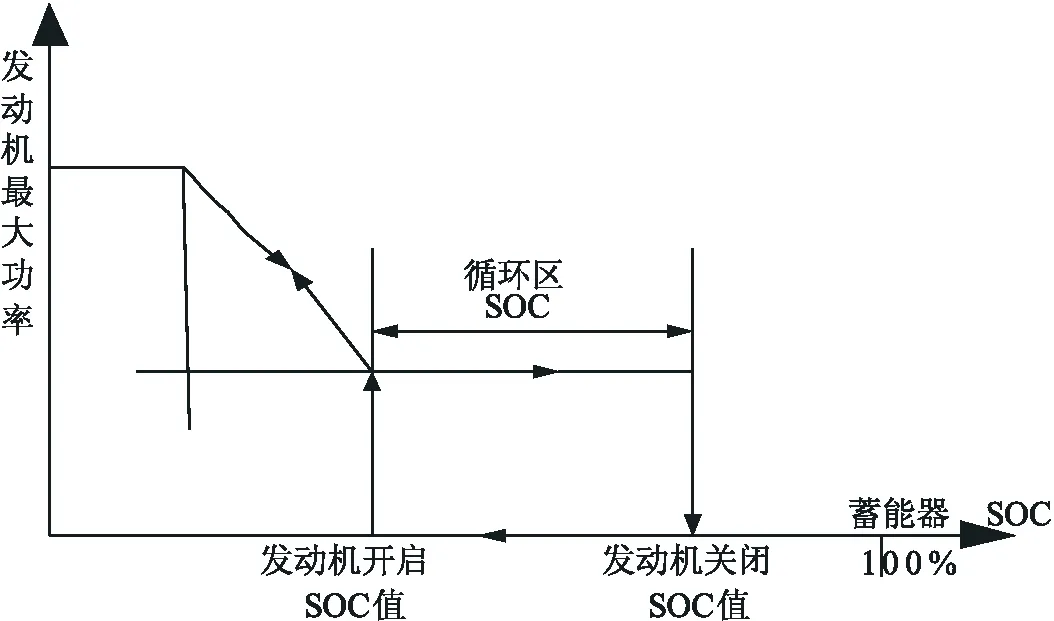
图7 基于模糊PID的HHV汽车动力源(发动机和蓄能器)功率分配原理Fig.7 Power distribution mechanism of HHV vehicle power source (engine and accumulator) based on fuzzy PID
3.3 综合平均燃油经济性分析
本文分析了发动机开启SOC值为0.25,发动机关闭SOC值为0.55时,液压混合动力整车燃油经济性曲线(图8)。图8显示了不同控制策略下的平均燃油经济性曲线。
传统汽车在仿真验证的结束时刻,总平均燃油经济性为10 mpg;基于模糊PID控制的液压混合动力汽车总平均燃油经济性是13.1 mpg,比单纯性模糊控制策略下燃油有效经济性提高约3%。仿真验证表明,所验证的控制策略是有效的,符合验证的要求。
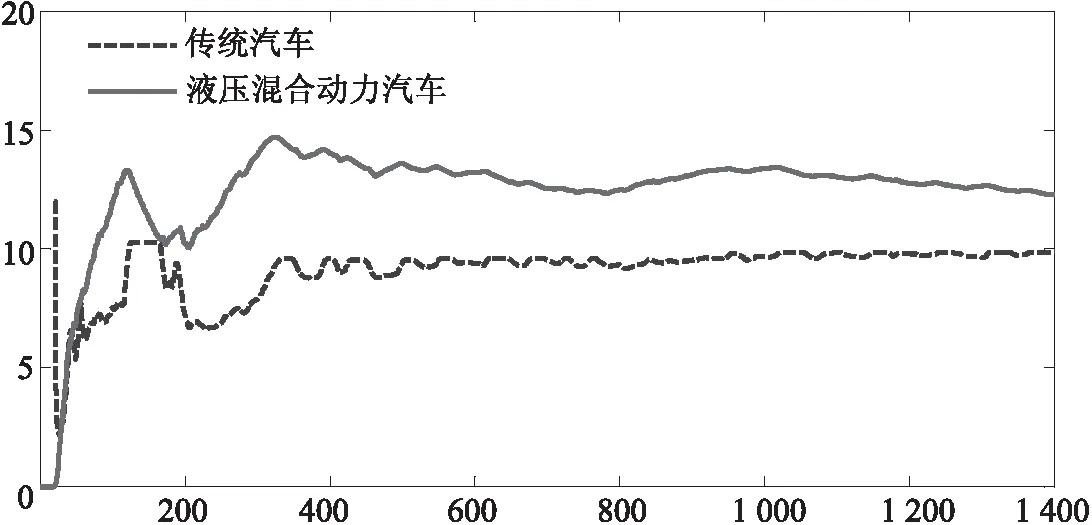
图8 基于模糊PID控制策略的平均燃油经济性比对Fig.8 Average fuel economy comparison based on fuzzy PID control strategy
4 结 论
本文介绍了当下汽车产业状况及国家节能减排的导向,认为传统化石燃料汽车已不能适应现今发展,液压混合动力汽车的先期功能元件的工业化日趋成熟,符合当前的可持续发展要求。笔者通过结合应用规则PID的控制策略和单纯性模糊控制策略,燃油经济性有一定提高;但在车辆特需工况下,燃油经济性降低明显。
本文将一种基于模糊PID的控制策略应用于液压混合动力汽车。仿真验证表明:模糊PID控制策略下HHV汽车发动机扭矩工作点分布,动力源(发动机和蓄能器)功率分配切换,综合平均燃油经济性等重要指标均符合验证需求,所设计的控制策略是有效的。
猜你喜欢
汽车与驾驶维修(维修版)(2022年8期)2022-09-20
房地产导刊(2022年4期)2022-04-19
汽车工程师(2021年12期)2022-01-17
汽车工程师(2021年11期)2021-12-21
建材发展导向(2021年15期)2021-11-05
新疆钢铁(2021年4期)2021-03-23
成都信息工程大学学报(2021年6期)2021-02-12
电子制作(2019年16期)2019-09-27
汽车零部件(2018年4期)2018-05-16
电子制作(2016年21期)2016-05-17
