智能物流机器人中的SLAM自主导航技术研究
2020-07-04 04:40陈立钢
机电信息 2020年14期
摘要:首先介绍了SLAM自主导航技术的含义,然后对SLAM系统结构进行了分析,在此基础上,对SLAM算法进行了研究,从实际建模角度出发,对现阶段SLAM存在的关键性问题进行了详细阐述,旨在为我国物流产业的智能升级提供一定的理论参考。
关键词:SLAM自主导航技术;系统结构;算法
0 引言
在仓储管理系统中,用机器人作为物理载体,综合机器人、人工智能、机电一体化控制等先进技术,能有效提高仓库物资的出入库、移库和盘库的智能化程度。而将SLAM自主导航技术应用于物流机器人中,能保证机器人高度的智能化及强大的环境适应能力,从而有效提升企业物流效率,降低生产成本。
1 SLAM自主导航技术
SLAM技术是通过机器人的位置信息构建环境地图,再从已构建的地图确定机器人的当前位置,即机器人通过传感器获取环境信息,系统根据获取的信息,求解自身方位并确定环境地图。物流仓储环境较为复杂,且机器人需要完成较多的工作,因此其位置信息将不断发生变化,利用SLAM技术,可完成机器人自主定位、对目标进行有效跟踪和操作、实现自主路径规划和导航、自动避开障碍物等操作,可大幅提高仓储系统的智能性和自主性。
2 SLAM系统结构
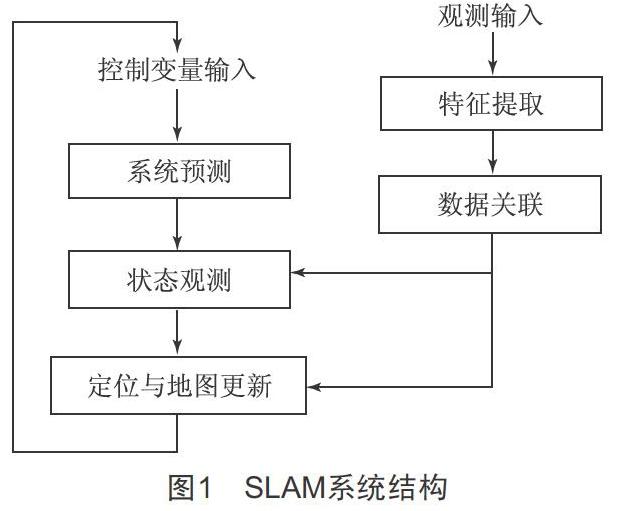
机器人自身配备有传感器等设备,其移动过程的位姿是通过对传感器信息进行估算而得到的。但传感器受自身精度等因素影响,其获取的信息会存在一定误差,因此还必须对环境路标进行有效观测,通过获取的环境路标信息,对机器人位姿进行矫正,环境信息中可识别的特征越多,估算的位姿也越精确,其系统结构如图1所示。
如图1所示,SLAM对机器人的位姿估算可分为4个部分:(1)对机器人的当前位姿进行确认,并输入相应的控制变量信息,从而预估出机器人在下一时刻的位姿;(2)提取传感器获取的环境特征数据,并进行数据关联;(3)对路标特征进行状态观测;(4)将观测到的路标信息用于矫正机器人的预测位姿,同时更新环境地图。
3 SLAM算法研究
SLAM技术中对不确定的环境信息是通过概率计算的方法进行估算处理,现阶段常用的有卡尔曼滤波算法和基于粒子滤波的算法。
3.1 SLAM的卡尔曼滤波算法
卡尔曼滤波算法是将机器人的位姿和环境特征信息建立一个动态循环,并将其进行迭代校正,其公式为:
X=[r m]T
式中,r为移动机器人的位姿;m为地图信息;将r和m共同储存在状态向量X中。
卡尔曼滤波算法是符合高斯分布条件的最优贝叶斯估计方法,但该方法只适用于解决线性问题。由于实际环境中非线性问题较多,所以将标准卡尔曼滤波算法用一阶泰勒进行展开,即EKF算法,EFK算法是把环境特征和机器人的位姿构建到一个高维状态空间中再进行估算。因此,EKF算法在进行不确定信息的处理时有较多优点,现阶段已被较多地应用于SLAM的研究中。
3.2 SLAM的粒子滤波算法
粒子滤波算法是用许多的粒子去获取更为精确的地图环境信息,如常用的基于Rao-Blackwellised粒子滤波器(RBPF)算法,RBPF算法是对大量的粒子运动重复采样,并通过粒子运動的轨迹信息对地图进行完善,使得由粒子构建起的“粒子地图”更加准确。在计算过程中,卡尔曼滤波、EKF算法都要求系统满足高斯分布条件,而实际模型中往往非高斯、非线性的系统较多,用粒子滤波算法能更好地处理该类问题。
4 SLAM技术中的关键性问题
4.1 SLAM的不确定性
不确定性是SLAM技术中的最主要问题,造成构建地图不够精确的主要原因有两点:一是机器人自身配备的传感器受精度等因素影响,造成其获取的信息与真实值有一定误差;二是外界如环境噪声产生的干扰导致的误差。其具体表现如下:(1)机器人在移动过程中出现打滑、未知外力的干扰等现象造成的不确定性;(2)机器人自身的传感器,如测量精度、分辨率等造成的对环境特征观测结果误差;(3)由于环境噪声的存在,将观测数据与地图数据进行匹配时,数据关联发生错误造成的不确定性。
由于存在种种不确定性,所以运用SLAM技术建立的模型往往不够精确,在实际测量时,可以采用给机器人配置分辨率更高的传感器,以提高获取信息的精度,抑或是采用多传感器获取信息,并将数据进行融合,提高测量准确度,同时也应注意对环境噪声进行排除,以减小误差。
4.2 SLAM技术中的数据关联
数据关联是将地图中已观测的数据与当前观测的数据建立对应关系,并判断数据特征是否相同,SLAM技术的准确性在很大程度上由数据关联性决定,其影响因素主要有3点:(1)将数据进行错误关联后,会对数据特征的来源判断错误,从而导致对移动机器人位姿的估计、对地图的构建错误;(2)地图环境中存在着较多的不确定因素,如环境噪声等,也会影响数据关联的准确性;(3)对数据进行关联计算有多种算法,不同的算法对SLAM的影响较大,常用的算法有最近邻数据关联法、概率数据关联法、几何关系数据关联法等,对不同的模型应选择不同的算法,以提高计算的准确度。
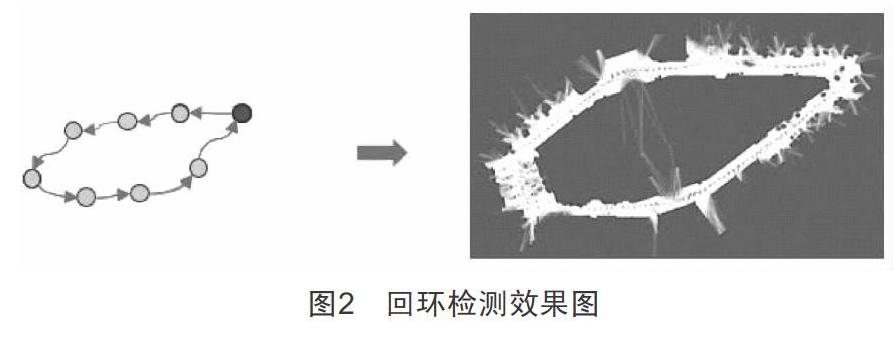
数据关联在视觉SLAM上也被称为“回环检测”,其本质是当机器人移动到当前位置时,对该位置的信息进行判断,确认其是否为之前经过的同一位置,机器人的移动随着时间推移,其误差将会逐渐积累,导致建图中会存在较大的累计误差,因此必须对其进行回环检测。回环检测效果图如图2所示。
当回环检测形成闭环,则意味着当前生成的地图与之前的地图更加匹配,构建的地图更加精确,机器人能更好地完成导航工作;若回环检测的结果无法形成闭环,则意味当前对地图的构建与实际相差较大。因此,回环检测在大面积、大场景地图构建上是非常有必要的。
4.3 SLAM对环境地图的表达问题
移动机器人对地图的构建主要用于自身的导航,因此必须符合以下要求:(1)构建的地图信息必须能准确描述并充分展示环境特征;(2)构建的地图需和任务目标相匹配;(3)构建的地图应足够精确,以保证受环境噪声干扰时,仍能准确估计出机器人的当前位姿。
5 结语
近年来,我国的物流行业发展十分迅速,在仓储管理过程中,充分运用移动机器人,可大幅降低企业的用人成本,并提高仓储系统的工作效率。在复杂的仓储物流环境下,将SLAM导航技术应用于移动机器人中,能更好地实现机器人的避障功能,从而提高其自主作业能力。
[参考文献]
[1] 刘浩敏,章国锋,鲍虎军.基于单目视觉的同时定位与地图构建方法综述[J].计算机辅助设计与图形学学报,2016(6):855-868.
[2] 王辉.基于ROS的机器人路径导航系统的设计与实现[D].沈阳:中国科学院大学(中国科学院沈阳计算技术研究所),2019.
[3] 黄鹤,佟国峰,夏亮,等.SLAM技术及其在测绘领域中的应用[J].测绘通报,2018(3):18-24.
[4] 范朝辉,石宏,陈其志.一种基于SLAM技术的智能导航小车的设计[J].机械研究与应用,2019(6):119-122.
[5] 杨建松.基于SLAM技术的移动机器人定位关键技术研究[D].南昌:东华理工大学,2019.
收稿日期:2020-05-06
作者简介:陈立钢(1972—),男,山东淄博人,工程师,研究方向:无轨迹导航物流机器人系列产品。
猜你喜欢
海南金融(2022年3期)2022-04-14
阅读与作文(英语初中版)(2019年8期)2019-08-27
中学生数理化·高一版(2017年1期)2017-04-25
中学生数理化·高一版(2017年1期)2017-04-25
中学生数理化·高一版(2017年1期)2017-04-25
中国高新技术企业(2016年34期)2017-02-10
山东工业技术(2016年23期)2016-12-23
科技视界(2016年17期)2016-07-15
数学大世界·小学低年级辅导版(2009年7期)2009-07-28