
无人机三轴云台视觉跟踪技术研究
2020-07-04 02:14王娜李强
电脑知识与技术 2020年14期
王娜 李强


摘要:无人机在执行跟踪或者拍摄任务时容易由于外界扰动和自身机械震动而产生视觉偏离,搭载云台的无人机需要克服运动状态下的载体方位、俯仰方位、横摆方位的干扰,在获取图像后还需要对目标进行光电耦合。本设计选用STM32103Z作为四旋翼无人机的三轴控制器,运用细分驱动算法对电机进行精准控制,采用ARM15作为图像处理模块,对摄像头获取的目标图像进行滤波、光电耦合、特征对比,采用高精度陀螺仪采集角度及加速度信息,搭建了一套四旋翼无人机云台控制的闭环系统,减小了搭载摄像机的云台及激光发射器在目标锁定过程中的惯性位移偏差。系统实现了四旋翼无人机在进行目标跟踪及拍摄过程中的稳定飞行。
关键词:四旋翼无人机;STM32103Z;ARMl5;细分驱动算法;闭环控制系统
中图分类号:TP311 文献标识码:A
文章编号:1009-3044(2020)14-0038-03
隨着无人机技术的快速发展及广泛应用,无人机搭载的任务载荷系统呈现向智能化、高精度化、多样化方面发展,无人机视觉跟踪及拍摄系统应用于各个领域中。由于执行飞行任务的无人机稳定性差干扰因素众多,研发一款稳定精准的目标锁定及自动跟踪的无人机已经迫在眉睫,本设计选用四旋翼无人机作为控制云台的载体,用STM32103Z实现无人机电机的角度控制及陀螺仪的输入输出信号处理,用ARMl5进行目标图像处理,以此搭建一个闭环的云台控制系统来实现无人机的视觉跟踪及拍摄任务。该系统需要克服飞行过程中载体的各种振动、颠簸、光照变化等干扰,保证搭载在云台上的高清摄像头能在干扰力的作用下实现自我调整,保证高质量地完成跟踪及拍摄任务。
1控制系统的总体设计方案
1.1云台电机控制系统设计
云台的结构方式取决于四旋翼的运动方式,四旋翼运动可以用横摆角、俯仰角、偏航角来描述,因此云台的结构采用横摆一俯仰一偏航三轴式设计,其中每一轴对应一个闭环控制系统,如图1所示,陀螺仪是利用高速回转体的动量矩敏感壳体相对于惯性空间绕正交于自转轴的一个或两个轴的角运动监测装置,可以精准地提供无人机的方向和位置信号,加速度计可以提供无人机的加速度信号。细分驱动芯片用来实现步进电机的平稳驱动,以此来控制云台的三个轴运动,采用细分驱动方法可以明显地提高步进电机的力矩,降低步进电机低速运转时产生的振动,大幅度有效地提高步进电机步长的分辨率,而且采用步进电机驱动芯片的实现方法比直接采用算法产生的细分驱动可靠性高,可控性强,可以直接配合其他算法进行步进电机的控制。
云台控制系统的主要功能及具体实现过程如下:该系统以STM32103Z为中央控制器。
根据来自视觉图像处理及拍摄系统的控制流信号,综合来自陀螺仪和加速度计的方向、位置、加速度信号来判断云台的3个转动角度:横摆角、俯仰角、偏航,同时在角度调整过程中接收陀螺仪和加速度信号和ARM的目标信号对角度进行微调。
其中细分驱动芯片选用东芝电子的THBl28,该芯片最高能实现驱动电流的256级细分,能满足本设计的电机稳定转动及控制需求。陀螺仪采用三轴陀螺仪组建MPU-6050,能够在恶劣的冲击和振动环境中提供高精度的监测,加速度计采用ADIS16445型号,能在复杂运动环境下精准提供加速度信息。
1.2视觉图像处理及拍摄系统设计
云台搭载的视觉处理系统包括如下五个子系统:供电电源系统、信息存储系统、图像获取系统、通信系统、LCD显示系统、调试接口。
本设计的图像处理及拍摄系统为嵌入式控制系统,该系统具备高集成化、低功耗、小型化的特点,主控制芯片是ARM处理器s3e2440,该系统对视频帧进行图像处理:图像预处理、目标检测、根据运动目标的图像位置计算偏差量,并运行控制算法,发送导引信号控制云台的合理转动。
由于本系统需要完成视频数据采集的任务,并经图像处理器对获取的图像进行运算,因此视频质量对跟踪效果影响很大,图像的分辨率很大程度上取决于感光芯片,感光芯片的作用是把获取的光子信号转化成电信号的传感器,目前国内外普遍认同的感光芯片分为两类:CCD与CMOS感光芯片,对于CCD(电荷耦合)芯片,其具备高灵敏度、小噪声、小信噪比、低成本、低功耗等特点,而CMOS在上述方面的性能明显不如CCD,因此本设计采用CCD类型的传感器用来完成视频采集的任务。
为了实现运动过程中的通讯任务,本设计采用RS232串口实现通讯,该芯片与ARM芯片s3e2440连接,采用芯片MAX3232进行电平转化。
本设计采用FLASH和SDRAM进行识别过程中的信息存储,可以自由扩展存储容量,海量存储各种信息。
调试接口采用JTAG方式来实现,其中JTAG接口分为四类:JTD0数据输出、JTDl数据输入、JTCK时钟、JTMS模式选择。
2电机细分驱动算法
步进电机是依据电磁原理由电磁力驱动的,由脉冲力来实现控制:对步进电机的两相绕组施加幅值不同的PWM波时,两组磁极线圈会产生不一样的磁力矩,步进电机的转子在磁力矩的合力作用下实现转动。但传统的控制方法容易产生电机的失步和抖动,使电机在执行任务时产生较大的误差。
为了改善步进电机的抖动和失步问题,可以采用细分驱动的方式来控制电机。细分驱动的基本原理:给电机输入一步一个台阶的阶梯波,使电机每输入一个阶梯波转动一个微小的步长,阶梯波细分的阶数越高,电击转动越稳定,控制越精确。
对于二项混合电机,假设在理想环境无互感干扰的情况下,可以建立平衡方程:
以上公式组成了步进电机的数学模型,其中Te,TL分别是电磁力矩和负转矩,J是步进电机的负载转动惯量,B是电机的阻尼系数,w是电机的角速度,θ是电机的位移角度。
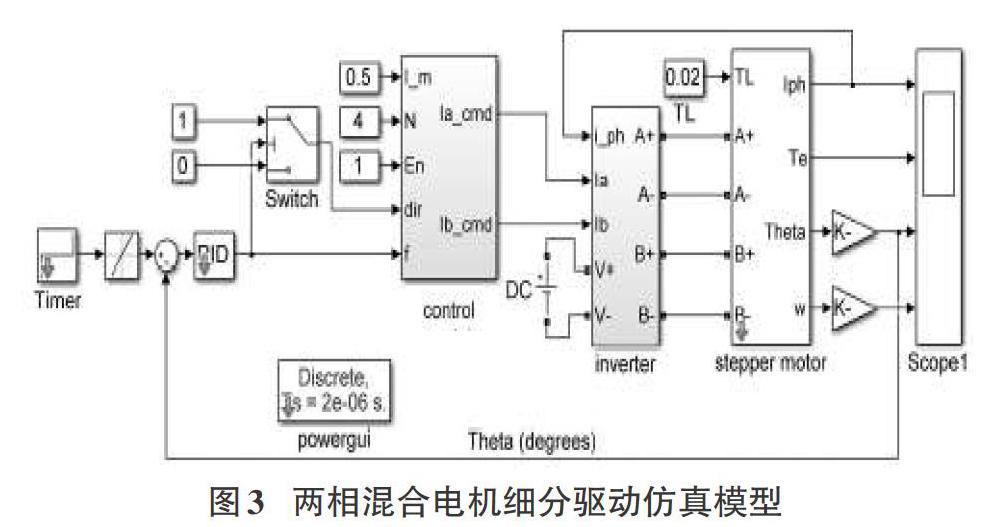
根据电机的数学模型来搭建两相混合式步进电机细分驱动模块,如图3,其中Inverter是细分驱动模块,step motor是根据公式x得到的电机模型。
利用仿真工具Simulink对该模型进行仿真,给电机输入出图4、图5、图6的4细分、8细分、64细分的控制电流波形图,可以得到电机转矩图如图7所示,从对比结果可以看出64细分能有效过滤电机干扰,实现电机平稳转动。
3结束语
本系统由两部分组成:图像采集及处理系统和云台细分控制系统,分别由ARM控制器s3c2440和STM32103Z作为主控制器芯片,外围电路分为:小型电源供电电路、陀螺仪驱动电路、加速度器驱动电路、电机驱动电路等。能根据图像识别的结果,用64步细分驱动的方式精确控制三轴云台的稳定运行,提高了系统精度,减少了电机抖动。综上,该系统能应用于对精度要求较高的场景比如无人机目标跟踪和无人机自动航拍,具有一定的实用价值,成本较低。
