
基于Simulink的偏置摇杆滑块机构运动仿真分析
2020-07-04 02:27曾鹏李永平
智能计算机与应用 2020年3期
曾鹏 李永平

摘要:针对偏置摇杆滑块机构,综合利用函数解析法与矢量法对其机构建立运动模型,在Simulink软件环境下建立该方程的运动仿真模型,并进行运动学仿真分析,以滑块为主动件,输入滑块的不同运动状态,研究其他构件的运动特性,并得到相关的运动曲线。通过分析各构件的运动特性,能清晰地掌握其运动规律,该研究方法及结论为进一步机构设计与控制提供依据。
关键词: 偏置摇杆滑块机构; 运动分析; Simulink仿真
【Abstract】 For the offset rocker-slider mechanism, the function analysis and vector method are used to establish the motion model. The motion simulation model of the equation is established in the Simulink software environment, and the kinematics simulation analysis is performed. The active part inputs the different motion states of the slider to study the motion characteristics of other components and obtain the relevant motion curve. By analyzing the motion characteristics of each component, the motion law can be clearly grasped. The research method and conclusion provide the basis for further mechanism design and control.
【Key words】 offset rocker-slider mechanism; motion analysis; Simulink simulation
0 引 言
[JP2]随着工业机械日益发展,对机构设计则提出更高的要求。平面连杆机构是由若干刚性构件用低副联接而组成,由于连杆机构具有承载能力强、工作可靠、结构简单、制造方便等优势,故被广泛应用在各种机械和仪器设备里[1-3]。偏置摇杆滑块机构是一种特殊的平面四连杆机构,通过对其构件状态及尺寸进行仿真调整,并配合相应的运动控制能有效地获得机构各铰链的运动状态,以解决工程上的实际问题。李献奇等人[4]、李建平等人[5]等人基于摇杆滑块机构各个构件的几何关系详细地介绍了摇杆滑块机构的定义以及种类和相关特性,并分析在农业机械领域的相关运用,为相关机构组合设计提供了思路。周舟等人[6]利用Pro/E软件和Adams仿真软件对摇杆滑块及同步带送料机构进行运动学仿真分析,最终获得理想的输出曲线,验证其设计的可行性。许海强等人[7]通过Matlab與SolidWorks软件建立机构的优化设计数学模型,并求解最优参数与运动分析。卢全国等人[8]基于TRIZ理论介绍了四杆机构演化仪的创新设计,并运用复数矢量法对其机构进行运动分析及仿真,获得机构的精确运动特性。由于Matlab具有先天的参数化特征,并在Simulink环境下建立机构模型,通过仿真分析可以方便观察机构运动特性的变化,为后续产品设计提供了一种快速修改参数达到理想物理性能的解决方案[9-11]。
由于大量文献都是以曲柄或摇杆为主动件,对其滑块进行运动仿真分析,本文在研究目前已有相关文献后,以滑块为主动件,通过解析法与矢量法对偏置摇杆滑块建立数学建模,然后在Matlab/Simulink环境下建立机构模型,研究在滑块匀速或匀加速运动下,仿真出连杆和摇杆的运动特性,为后续进一步工程运用研究提供了可靠依据。
1 摇杆滑块机构运动学方程
1.1 摇杆滑块机构的组成
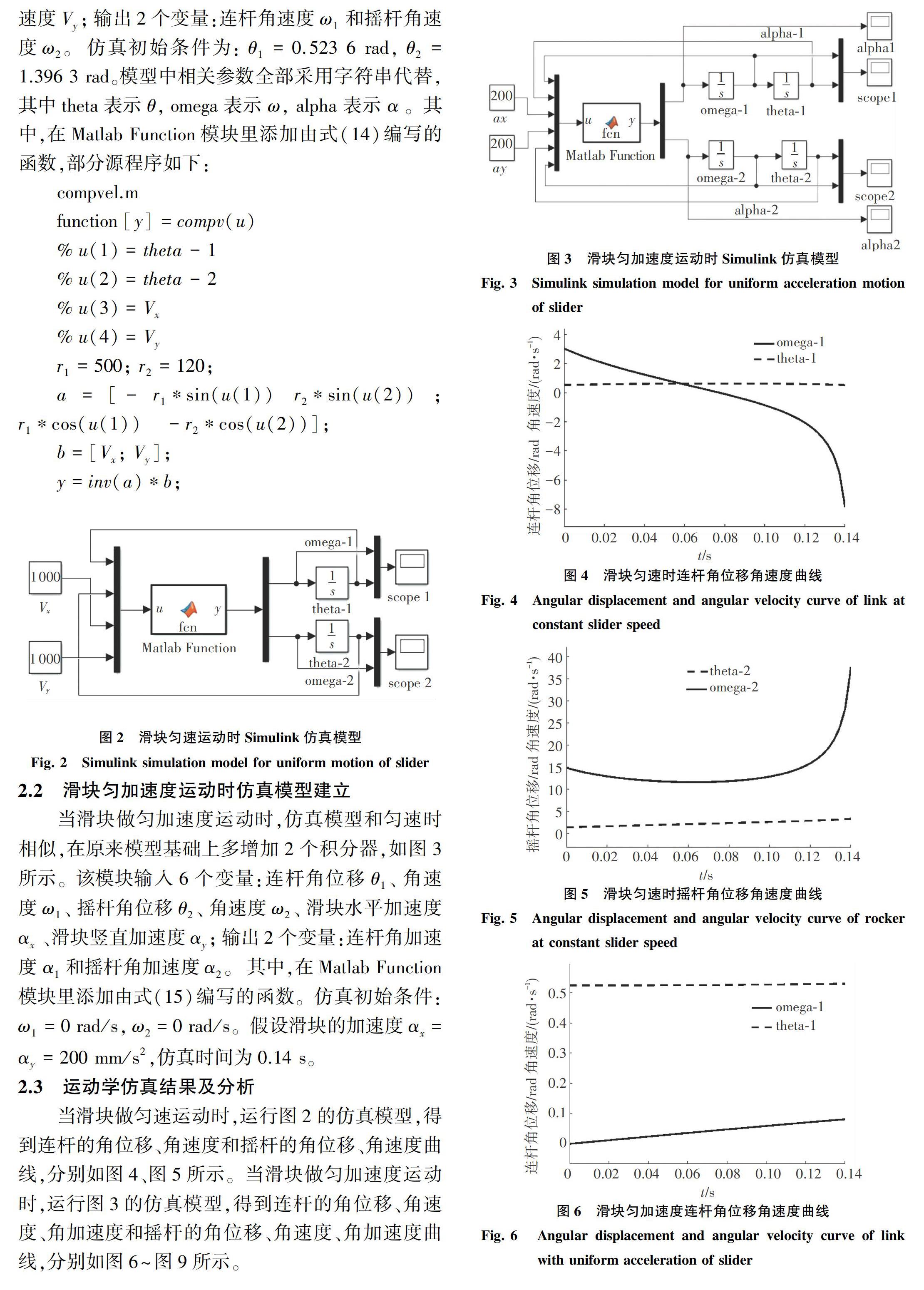
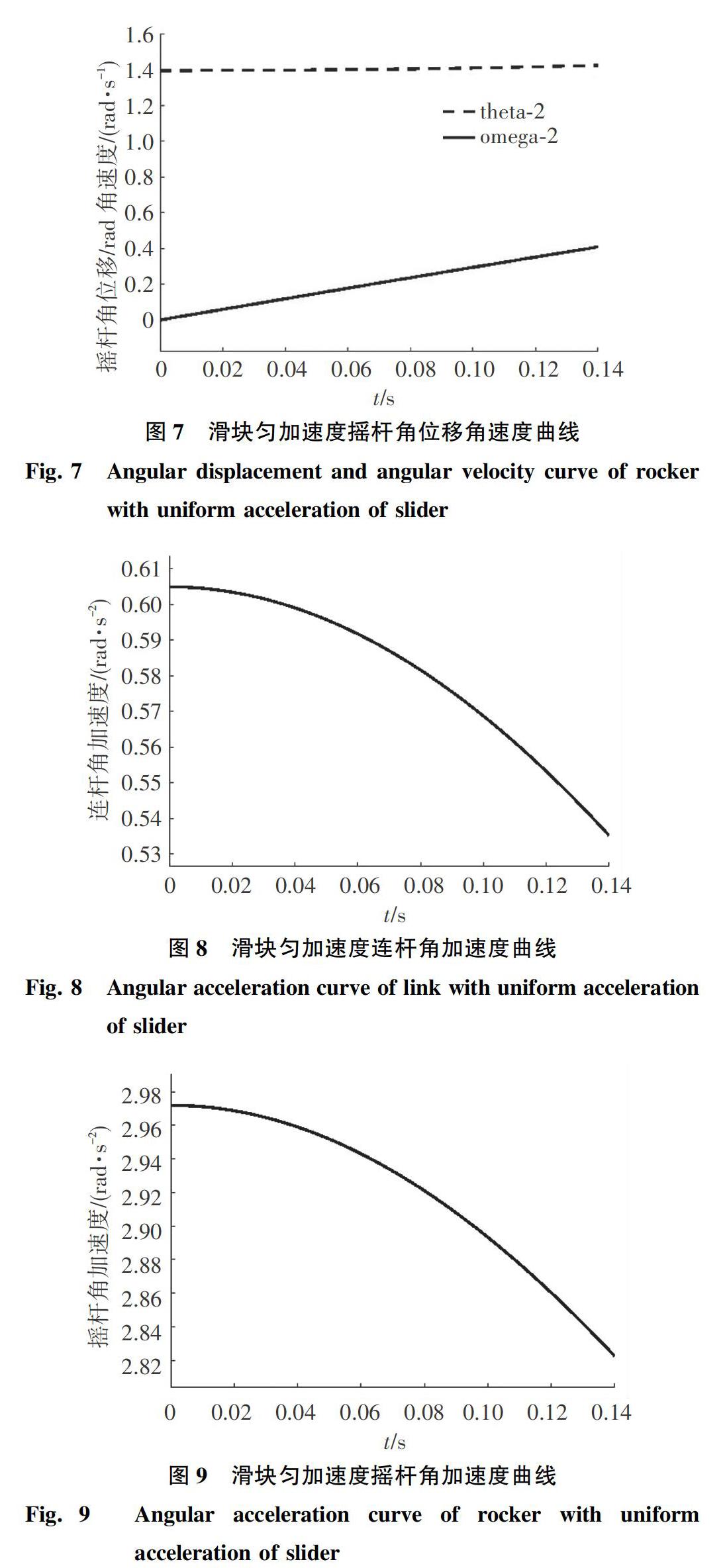
分析仿真结果曲线可以看出,当滑块输入状态不同时,仿真曲线具有较大的差异。连杆和摇杆的角位移曲线变化趋势相近,而角加速度曲线相差较大,当滑块匀加速度时,其他构件的角速度变化趋势[CM(22]都比较平稳且相似,而当滑块匀速时,连杆与摇杆的[CM)][LL]角速度曲线呈现互补的状态,但从两者的角速度曲线不难发现,其变化率大致相同,即加速度相似。从图6~图9各曲线可以看出,各构件的运动特性都比较吻合,说明当控制滑块匀加速度时,整个机构更容易达到稳态,也更方便控制,可为工程领域里提供有效的参考基础。
3 结束语
本文通过对偏置摇杆滑块机构进行运动学建模与Simulink仿真分析,得到相应的函数模型及各构件在滑块不同状态输入下的运动特性。基于仿真软件强大的参数化与矩阵计算能力,该方法只需修改参数和函数模块,就能得到各参数间的相互关系,精度效率高。通过分析各构件的运动特性,能清晰地掌握其运动规律,可以在模型里调节各参数来达到预期的运动轨迹,为机构设计与控制提供依据,并将结论运用到工程领域里,解决实际问题。
参考文献
[1] 孙桓,陈作模,葛文杰. 机械原理[M]. 8版. 北京:高等教育出版社,2013.
[2]HAN S S, KAWAI T, NISHIKAWA A, et al. Spherical-coordinate manipulator with circular telescopic rail driven by slider-rocker mechanism[J]. The Proceedings of JSME annual Conference on Robotics and Mechatronics (Robomec),2017,2017.
[3]NAEENI I P, KESHAVARZI A,FATTAHI I. Parametric study on the geometric and kinetic aspects of the slider-crank mechanism[J]. Iranian Journal of Science and Technology, Transactions of Mechanical Engineering,2019,43(3):405.
[4]李献奇,刘维维,高连兴. 摇杆滑块机构及其在农业机械上的应用研究[J]. 农业科技与装备,2014(1):20.
[5]李建平,刘俊峰,刘洪杰,等. 基于摇杆滑块机构的割草机割茬高度机构设计[J]. 农机化研究,2013,35(4):96.
[6]周舟,王志明,蔡正龙,等. 摇杆滑块及同步带送料机构仿真分析[J]. 计量与测试技术,2017,44(12):76.
[7]许海强,唐海平. 曲柄滑块机构的MATLAB优化设计与SolidWorks运动仿真[J]. 宝鸡文理学院学报(自然科学版),2019,39(2):63.
[8]卢全国,段年嵩,聂勤,等. 四杆机构演化仪的设计与运动分析[J]. 机械设计与制造,2018(4):206.
[9]蔡玉强,朱东升,吴楠. 基于Matlab/Simulink的高速压力机曲柄滑块机构的动力学研究[J]. 机械设计与制造,2018(1):192.
[10]刘勇,王卫华,李志刚,等. 基于Simulink的偏置曲柄滑块机构运动学和动力学分析[J]. 科学技术与工程,2014,14(1):186.
[11]陈江义,刘竹丽,王迎佳. SIMULINK环境下双曲柄滑块机构的运动学分析[J]. 郑州大学学报(工学版),2009,30(3):79.
