面向分拣机器人的多目标视觉识别定位方法研究
2020-07-04 08:53王新新李文革
科学技术创新 2020年18期
郭 军 王新新 李文革
(山东电子职业技术学院,山东 济南250200)
传统的分拣机器人在进行工作的时候都是通过示教和离线编程的方法进行,但是如果在工作的时候目标位置发生变化就会出现分拣失败的请情况发生,严重影响工作效率。随着科技的不断发展,人们开始重视机器人的视觉感知能力和对环境的适应能力。通过不断的研究发现面向分拣机器人的多目标视觉识别定位方法能够通过视觉系统了解作业目标图像,之后对图像进行分割和识别,建立相应的图像信息位置模型定位,真正的实现面向分拣机器人的识别和定位。
1 面向分拣机器人的多目标视觉识别定位方法研究
我国的很多研究者在这段时间里面都对面向分拣机器人的多目标视觉识别定位方法进行研究。研究者王燕玲在研究的时候提出了一种基于改进背景减法的运动目标的自动检测方法,这种方法能够真正的实现双背景自动更新解决背景发生变化情况下的目标检测问题。我国的研究者王诗宇在研究的时候也提出了一种简单的控制方法,这种控制方法能够真正的让机器人对散乱物料进行快速抓取。
针对分拣机器人作业目标的结构形状的复杂和随机摆放等因素,利用面向分拣机器人的多目标视觉识别定位方法能够最大限度的对多目标图像进行分割,真正发挥出分拣机器人的作用。
2 分拣作业目标轮廓区域提取
2.1 预处理分拣作业目标。如图所示是预处理分拣作业目标图:
根据图片信息能够发现视觉在成像过程中一旦受到一些外界因素的干扰就会降低图像的对比度,影响分拣目标的提取。在成像过程中会使用高斯滤波器进行降噪处理,在提高图像对比度的时候使用光照归一化算法进行处理。
2.2 作业目标轮廓区域提取。因为分拣机器人在进行工作的时候会同时识别多个分拣作业目标,所以需要在提取作业目标的时候加入融合形态学算法的帮助,分拣目标里面有很多加工的孔,分割后的目标的背景都在黑色区域内,最后在现实的时候目标的边缘有时会存在一些不光滑现象发生,针对这样的问题都可以使用形态学来进行解决。
3 分拣作业目标的识别与定位
3.1 连通区域的标记。因为每个分拣作业目标的轮廓区都是独立的区域,连接这些区域的各像素就叫做连通域。在区域里面需要对不同的像素进行标记,这样就可以把图像中的连通域提取出来,这样就可以进行分拣。
在连通区域标记的时候连通域的数量就是分拣目标的数量。
4 实验数据分析情况
4.1 分拣机器人的手眼标定。在进行分拣控制的时候机器人和相机进行分离的时候会把相机固定在支架上,这样就可以利用图像坐标系的坐标点转化笛卡尔坐标系下机械臂相对的坐标点,进而获得需要的转换系数。在机器人归零之后手动移动机器人就会接触到对应的机器人坐标,之后就可以通过旋转矩阵了解机器人坐标系转换的系数。
4.2 实验数据分析情况。在进行实验的时候研究者根据实际情况开发了面向分拣机器人的视觉识别定位软件,之后对相应的分拣目标进行验证。因为分拣目标的形状各种各样,所以在实验的时候所有的目标都需要随机进行放置。
4.3 整齐放置的识别与定位分析。在实验进行的时候先选择不同形状的分拣目标,之后在画出运行结果图:
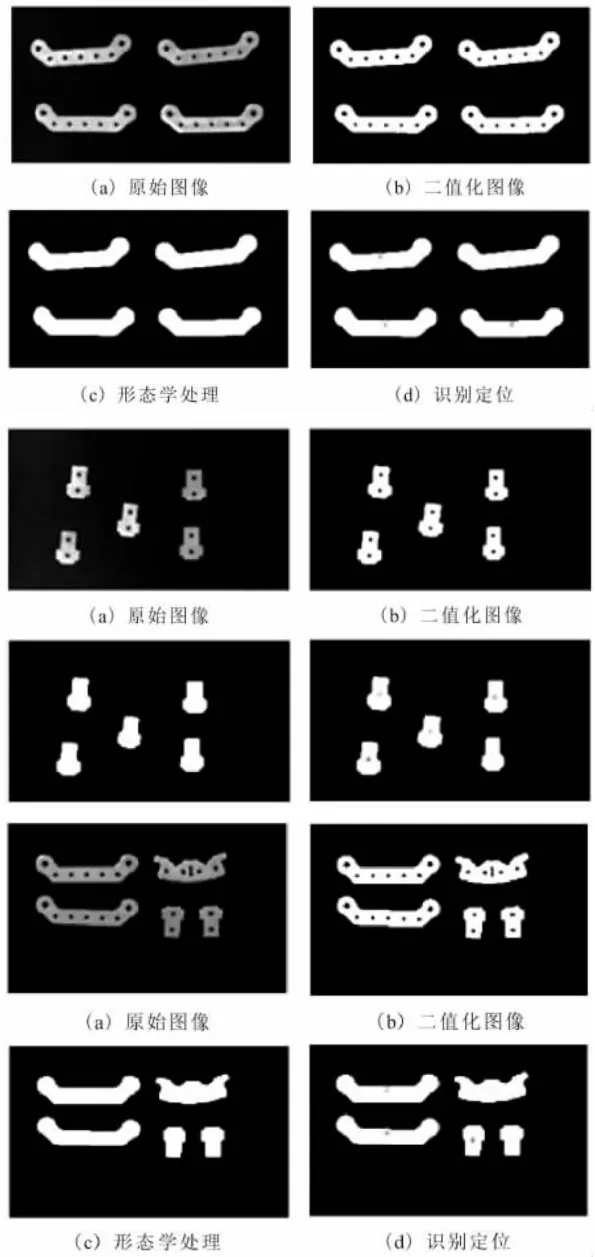
图2
从图上的数据信息能够发现对于整齐放置的分拣目标不管形状是否相同都可以通过此方法得到分拣目标的个数,并且找到质心的位置。知道质心定位的数据能够清楚的知道分拣目标在图像中的位置情况,同时还可以通过质心得到像素的位置。在实际进行操作的时候会通过手眼标定关系了解分拣机器人的空间位置,给机器人在工作的时候提供准确的位置信息。
4.4 随机放置的识别与定位分析。如图所示是选择不同目标的随机放置运行结果:
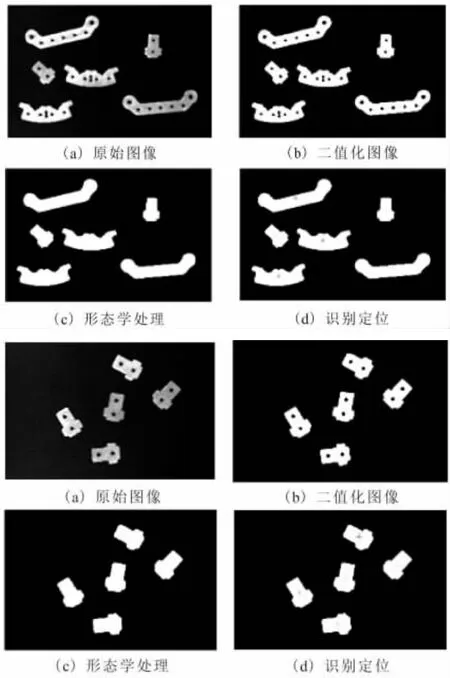
图3
通过图上的数据内容能够发现随机放置的分拣目标也可以通过这种方式来得到分拣目标的个数和每个目标的图像坐标。
通过了解内容和分析实验数据能够知道新出现的面向分拣机器人的多目标视觉识别定位方法不仅能够提高分拣机器人工作的效率,还能通过复杂的实验对分拣的目标进行个数的统计和目标的识别与定位。面向分拣机器人的多目标视觉识别定位方法在使用的时候能获得多个作业目标图像进而提高图像的对比度,之后在通过完整的分拣目标的轮廓区域进行统计目标和数量。在实验的时候还发现建立相应的质心坐标能够让分拣机器人的手眼标定得到需要的转换参数,真正的给分拣机器人提供准确的位置,让机器人能够准确的进行工作。
猜你喜欢
中学生数理化·七年级数学人教版(2022年6期)2022-06-05
中学生数理化(高中版.高考理化)(2021年5期)2021-07-16
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
导航定位与授时(2020年5期)2020-09-23
作文小学中年级(2020年6期)2020-07-24
铁道通信信号(2020年9期)2020-02-06
中国外汇(2019年20期)2019-11-25
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07