
基于Simscape的计算机控制系统仿真实验平台
2020-06-30 10:15刘海玲
微型电脑应用 2020年4期
刘海玲

摘 要: 计算机控制系统相关课程对硬件的需求较高,极大地增加了实验成本。传统的单纯数字仿真难以提供生动形象的实验过程,阻碍了课程教学效率。为了解决问题,对计算机控制系统仿真实验平台进行了研究,完成了基于Simscape仿真实验平台的设计,模拟迭代计算差分方程的过程,通过物理模型模块完成被控电路系统的构建,结合使用触发子系统及相应程序进行计算机系统仿真,实现对计算机周期性采样过程的模拟。以二阶电路系统的最少拍控制为例对仿真设计过程进行阐述,为搭建相关课程的仿真实验平台提供参考。
关键词: Simscape; 计算机控制系统; Matlab; 仿真实验平台
中图分类号: TP 273.5-4 文献标志码: A
Computer Control System Simulation Experiment Platform Based on SIMSCAPE
LIU Hailing
(Department of Foundational Courses, Qilu Medical University, Zibo, Shandong 255300, China)
Abstract:
The computer control system related courses have higher requirements on hardware, which greatly increases the experimental cost. The traditional simple digital simulation is difficult to provide a vivid experimental process, which hinders the efficiency of the course teaching. In order to solve the problem, a system simulation experiment platform was studied. The design of the simulation platform based on Simscape was completed. The process of iteratively calculating the difference equation was simulated. The construction of the controlled circuit system was completed by the physical model module. The system was simulated by using the trigger subsystem and the corresponding program. The simulation of the computer periodic sampling process is realized. The simulation platform is explained by taking the minimum beat control of the second-order circuit system as an example to provide a reference for the simulation experiment platform of the relevant course.
Key words:
simscape; computer control system; matlab; simulation experiment platform
0 引言
作为自动化类专业的重要课程计算机控制系统的显著特点在于理论联系实践,该课程教学质量提高的关键在于实验效果的提升,计算机控制系统相关课程对硬件的需求较高,极大的增加了实验成本,传统的单纯数字仿真难以提供生动形象的实验过程,阻碍了课程教学效率的提高,目前被控对象在硬件实验平台中大多由电源、放大器及电气元件(电阻、电容和电感等)等构成,维护成本较高且灵活性差,需要学生在实验前做到充分准备,提高操作的准确率以提升硬件实验系统的使用寿命,为有效硬件实验教学,降低成本提高实验的效率,通过仿真实验台的开发实现仿真演示实验,本文主要对计算机控制系统仿真实验平台进行了研究,所建立的仿真实验平台在计算机控制系统教学中具有较高的实用性,其搭建过程同实际硬件连线过程一致,使课程的相关理論和分析方法更加直观的展现给学生,有效提高了物理实验的效率。
1 功能设计
计算机控制系统相关课程对硬件的需求较高,目前多以数学模型代替仿真系统,传统的单纯数字仿真难以提供生动形象的实验过程,阻碍了课程教学效率,利用数字仿真及Matlab工具可有效解决这些问题,计算机控制系统仿真平台主要功能在于:(1)模拟被控对象,提高实验过程的直观性;(2)模拟计算机系统,其关键在于实现差分方程求解,可结合使用Matlab相应模块及控制器的脉冲传递函数D(z)实现。但比较抽象,不利于学生接受,仿真系统运行过程同实际工作过程的一致性还有待提高。本文主要完成了基于simscape仿真实验平台的设计,simscape工具箱包含于simlink库里,物理模型完成被控对象电路系统的构建,通过使用simscape中的物理模型模块(同实际物理元部件相对应)模拟实际硬件系统组装过程,实现一个直观的应用系统的构建,同实际硬件连接过程一致的仿真平台能够使学生的实验兴趣得到显著提升。该仿真平台的计算机系统通过触发子系统(位于simlink模块库中)的差分方程求解函数迭代求解实现,并实现对计算机周期性采样过程的模拟,从而使仿真运行过程同实际控制过程具备较高的一致性,增强实验的工程感。以仿真平台通过二阶电路系统的最少拍控制为例对仿真设计过程进行阐述,仿真实验过程具备较高的准确性和一致性,可作为硬件实验前的有效补充,在计算机控制系统教学中具有较高的实用性,从而有效提高了物理实验的效率[1]。
2 仿真实验平台构成
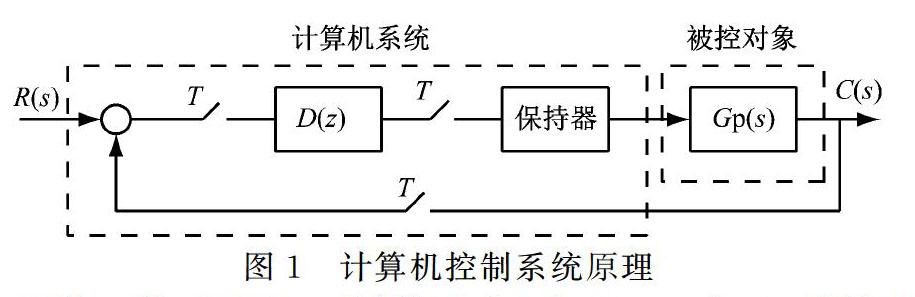
计算机控制系统原理典型方框图如图1所示。
具体工作过程为:对被控对象(由Gp(s)表示)的输出信号进行采集后将其转换成数字信号(通过编码量化实现),接下来同参考输入进行比较完成误差信号的计算,再向控制器D(z)中输入计算结果,控制输出的获取由D(z)根据实际情况选择一定的控制算法实现,再由保持器完成输出信号到模拟信号的转化,从而实现对执行机构的驱动及被控对象的控制。据此针对计算机控制系统本文所设计的仿真实验平台由被控对象和计算机系统两大模块构成,整个闭环系统通过二者间的反馈形成,通过电子元件构成的电路系统(包括電阻、电容、放大器等)实现被控对象的模拟,具备较高的线性化程度,适用于对基于控制算法的实验平台进行验证。计算机系统的功能在于采样、模数转换、计算控制量等。本文仿真实验平台以最少拍控制二阶电路系统为例完成对构建过程和方法的描述[2]。
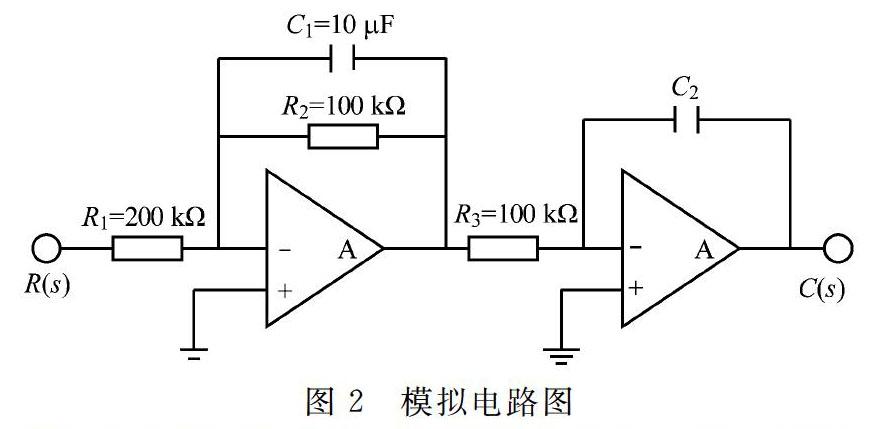
二阶系统的模拟电路系统具体如图2所示。
可将该系统视为典型二阶线性系统的一种(忽略部分非线性因素),R1、R2、R3的取值分别为200 kΩ、100 kΩ、100 kΩ,C1和C2的取值分别为10 μF,以电路特性为依据即可获取该系统的传递函数[3],具体表达式,如式(1)所示。
作为一种面向对象的物理建模工具,simscape基础模块库涵盖众多功能的子模块组(包括电力、液压、气动磁等),电路系统的物理模型通过选用simscape(mathworks公司)中相关模块完成构建,构建本系统主要运用其中的电模块组,由电元件(包括电容、电感、电阻、运算放大器等)、电输入源、电传感器(包括电压、电流传感器)构成,电路仿真系统通过使用simscape模块库中的对应元件建立更加方便,建立该子系统时通常有两类信号会出现在simscape仿真框架下,即物理信号(对应物理模型)和常用simlink信号。并存于仿真框图中的这两类信号线不能直接互连,通过物理信号直接相互转换模块的调用完成转换后实现二者的混用(simlink-PSconverter、PS-simlink converter)。并通过对所建立的系统进行封装增加了适用性,封装后的输入端口需完成数值信号到物理信号的转换,再转换为电压信号(通过受控电压源模块完成),到输出端后再转化为数值信号。物理信号再仿真平台中传递时通过相应传感器完成检测和测量(如用电压传感器测量电压信号)[4]。
3 计算机系统的实现
3.1 系统的Simlink实现
作为仿真平台的关键模块,计算机系统的功能包括计算控制量、信号转换及保持、A/D及D/A转换等,本文以控制量的计算为重点,该部分主要涉及到控制器脉冲传递函数(D(z)),跟踪误差脉冲序列(由E(z)表示)由控制器接收后根据D(z)获取差分方程,进而完成控制量序列的计算,再转换为模拟信号(通过保持器)最终实现对被控对象的控制。计算机系统运行时能够完成周期性的采样和计算(周期可根据实际需要进行调整)及差分方程的运算,并能完成离散的序列到连续模拟信号的转换。本文用触发子系统模块(位于Simlink基本模块库中,带有脉冲信号发生器)对仿真平台的计算机系统进行模拟,Simlink中端口与触发子系统模块间的关系具体如图3所示。
该模块功能的执行与否取决于其触发端口,表现为下降/上升沿的外接周期矩形脉冲输入信号促使被触发的模块工作,大小和性质在数值上表现的信号进入子系统,这一过程可用来对量化特性的周期性采样进行模拟(通过触发脉冲周期值的设置即可对采样周期进行调整),输出端在无触发信号的情况下则表现为零阶保持器的特性(即保持之前的数据不变)。完成离散序列到模拟信号的转化。通过自定义Matlab函数模块的添加(在触发子系统输入输出端),将求解差分方程函数文件名称填写到该模块中,从而实现调用计算机控制算法[5]。
3.2 计算机控制仿真闭环系统
基于Simscape的计算机控制系统仿真平台在计算机系统中输入二阶电路系统的输出和参考信号,由计算机系统实现误差信号的计算(通过比较器功能),采用控制算法完成控制量的求解及信号保持功能。可根据实际需要将属于斜坡信号的输入参考信号设定成相应的典型输入信号。
4 最少拍控制算法的实现
相应程序编制思路及运行结果以实现二阶电路系统最少拍有纹波及无纹波控制算法为例,在建立仿真系统的基础上需完成差分方程求解过程以实现计算机控制算法,将自定义Matlab函数嵌入到触发子模块中,再通过调用该函数实现本文的仿真方法。
经过最少拍误差E(z)只有有限项(在典型输入信号作用下,跟踪误差e(k)恒为常量),设计该控制系统,最少拍控制器脉冲传递函数[6],如式(2)所示。
误差脉冲传递函数表达式为:φe(z)=1-φ(z)
被控对象Gp(s)(带有保持器)的z变换由G(z)表示,闭环脉冲传递函数如式(3)所示。
加零阶保持器的二阶受控对象的传递函数如式(4)所示。
在采样周期为T的情况下,对上述传递函数进行离散处理,结果如式(5)所示。
为使E(z)具有最小的有限项,根据最少拍控制原理R(Z)需选择e(z)=(1-z-1)2,则最少拍算法的控制量表达式如下(斜坡输入下),属于典型的差分方程如式(6)所示。
主要由两个M文件构成该程序:独立的初始化文件和嵌入在模拟计算机控制系统中最少拍控制算法函数(My controller(x),可自定义),分别负责对差分方程变量进行初始化处理、通过触发子系统模块完成对控制量的计算。该函数在触发模块经方波下降沿触发时执行[7]。求解该差分方程的步骤如图4所示。
在初始化文件运行完的基础上运行仿真系统,设定触发系统的矩形脉冲周期即采样周期为0.2 s,运行上述仿真系统,斜坡输入下最少拍有纹波控制仿真结果如图5所示。
闭环系统的输出在控制器(按最少拍无差系统设计)的控制下可在两个采样周期(第2拍)跟上在采样点上达到无差。由于经过2拍后数字控制器的输出是振荡收敛(非零或常值),输出在非采样时存在纹波如图5(a),考虑最少拍无纹波控制算法,其仿真过程同样只需修改自定义的函数中相应算法,在同样仿真条件下最少拍无纹波控制的仿真结果如图6所示,u(k)在控制系统经过3拍以后达到恒值状态,在采样点间系统输出无纹波存在。
系统仿真结果表明同实际硬件运行程序相比平台程序调用方式和运行过程较为一致,能够在仿真系统中有效运行的控制算法程序结合设计情况改动语法即可在单片机等装置上运行,计算机控制算法、函数同样可根据需要修改实现对各类计算机控制算法的验证,该仿真实验平台可作为硬件实验前的有效补充,同实际硬件实验过程相比,仿真实验过程具备较高的准确性和一致性,在提高实验效率的同时可使学生的实验兴趣得以显著提升。
5 总结
本文主要对计算机控制系统仿真实验平台的设计,物理模型完成被控对象电路系统的构建,通过使用Simscape中的物理模型模块(同实际物理元部件相对应)模拟实际硬件系统组装过程,实现一个直观的应用系统的构建,实验结果表明该仿真实验平台可作为硬件实验前的有效补充,同实际硬件实验过程相比,仿真實验过程具备较高的准确性和一致性,在计算机控制系统教学中具有较高的实用性,其搭建过程同实际硬件连线过程一致,使课程的相关理论和分析方法更加直观的展现给学生,在显著降低实验成本的同时提高学生的实验效果及学习积极性,从而有效提高了物理实验的效率。
参考文献
[1] 付宗运.计算机通信与控制系统运行可靠性的提升策略[J].科技风, 2017(8):108-109.
[2] 马宏.关于计算机网络工程与信息系统工程质量控制的研究[J].电子世界,2018(23):74-76.
[3] 东述樾,赵娜.关于医院计算机网络安全管理工作的维护策略分析[J].世界最新医学信息文摘, 2018(74):198-199.
[4] 张翰英,张艳华.计算机网络远程控制系统及应用研究[J].科技创新与应用, 2017(4):88-89.
[5] 赵文驰.计算机技术在工业自动化控制系统中的应用[J].山东工业技术, 2017(5):122-123.
[6] 王启光.计算机控制系统的可靠性技术研究分析[J].现代工业经济和信息化,2016(3):86-87.
[7] 李敏艳.唐鸿儒.李生权.等.基于CDIO+PBL模式的计算机控制技术的实践与创新[J].高教学刊,2018(22):41-43.
(收稿日期: 2019.07.03)
