
轨道交通列车前视障碍物智能检测系统相关研究
2020-06-30 05:51:40刘建锋赵靖许珲
工程技术与管理 2020年5期
刘建锋 赵靖 许珲
浙江众合科技股份有限公司,中国·浙江 杭州 310051
轨道交通列车;前视障碍物;智能检测系统
1 世界各国研究现状
轨道交通系统在运作过程中需要进行轨道障碍物检测分析工作,可以使用激光雷达、计算机系统,缩小事故发生的范围。其他国家在进行轨道交通研究过程中起步较早,尤其是在进行列车障碍物检测过程中,常用的有专用的轨道障碍物探测机车、固定轨道沿线的探测设备、以及障碍物的自动检测设备等。在进行以上列车障碍物检测时,首先,对于专用的轨道障碍物探测机车来说,它是一种新型的自动轨道探测机车,具有高能疝气灯扫描探灯组合,主要运用计算机系统的图像处理技术,能准确的判断障碍物的路线。而固定在轨道沿线的探测设备,能够对固定区域内的障碍物进行检测,它是铁路站台区域的安全系统,使用的是激光雷达技术,能有效地检测障碍物出现的范围、响应时间等,主要是基于智能光学,它是一种固定检测装置,可以分别在轨道两侧安装红外线发射以及接收系统,判断轨道上存在的障碍物。在进行自动检测设备使用过程中,可以通过视频相机、红外线雷达检测、了解轨道上存在的障碍,使用障碍物和轨道检测算法,进行危险事故的判定工作。
目前,在进行轨道交通列车前障碍物智能检测系统探究过程中,中国绝大部分的研究主要以非接触式、随动探测等为依据,仍然处于实验研发阶段。通过机器视觉和图像处理,对列车的轨迹进行分析,它是一种自动检测装置,可以使用车载的CCD 摄像机,能够及时地记录列车实时画面,进行路轨图像的预处理工作,全面提高图像识别率。除此之外,列车运行前方动态监控系统可以使用两个摄像装置进行图像采集,能有效的模拟人机交互,进行轨道障碍物的检测和扫描工作。尤其是高德红外股份有限公司在进行智能列车交通监控系统分析时,将红外热成像仪安装在列车到头部,做好前方障碍物、分叉道等危险情况的报警工作,避免恶劣环境产生的影响。
2 轨道交通列车前视障碍物智能检测系统的发展趋势
基于世界各国的研究,路障检测物在进行检测时,可以使用计算机视觉铁路障碍检测方式,能够在列车沿线安装摄像头进行障碍物的检测工作,可以采用无线传输的方式,然而在运作过程中成本较高。除此之外,也可以在列车上安装光学传感器进行路政检测。在进行世界各国轨道交通列车障碍物系统检测过程中,通过各种调研资料,需要进行监视障碍物系统的实时检测,做好目标细节、分辨率以及全天候的管控工作。和列车进行实时通讯,即时获得轨道交通的行车方向、速度、距离等进行以上数据的综合分析,能够及时地检测到障碍物,强化安全装备的试用效果,保证列车行车安全[1]。
3 轨道交通列车前视障碍物智能检测系统技术实现路线
3.1 系统结构设计
只有确定各系统模块的组织形式,才能够对列车前障碍物检测系统进行总体的优化设计,全方位地分析系统的性能。通常情况下,系统结构设计主要包括列车的地理位置、激光雷达、无线电雷达、红外线传感器、3D 摄像机、超声波传感器等。能够进行全局服务模块的控制,做好列车行为方式的分析,对列车的运行状态进行实时监管,做好数据库和日志的记录工作,提高服务的可视化[2]。
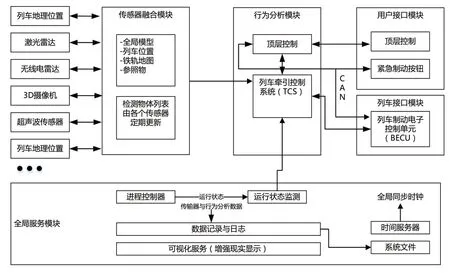
图1 系统总体结构
3.2 传感器与模块化集成
为了确保前视障碍检测系统,满足列车的行驶需求,需要使用传感器,做好系统特性的检测和分析工作。在进行传感器产品筛选分析时,可以通过外围的电路或者是AD 转换电路,做好控制系统和传感器之间的控制控制工作,由于绝大多数的图像传感器在经过信号特殊性处理以后,会使用具有高速串行总线的图像传感器与系统进行直接连接,可以使用统一/通用接口的模块化传感器,降低系统升级存在的故障,提高模块升级的便捷性和准确性[3]。
3.3 传感器融合软件模块
在融合软件模块研发过程中,为了帮助不同传感器能够及时地采集到信息,提高信息传递的真实性和精准性,可以通过高精度时钟协议进行个传感器节点的控制工作,保证传感器信号能够在时间上进行精准融合,全面提高计算机系统的运行效率。一般情况下,传感器都是由数据总线进行传递的,进行数字信号的处理。可以使用综合性能最优的集中方式,使用最近邻域法、联合概率、数据互联等多种方式将获得的雷达信号和各相机信号在空间上进行重构和融合[4]。
3.4 相机成像原理
通过建立相机成像模型,确定铁轨所在平面上的点与屏幕像素点之间映射关系,如图2所示。
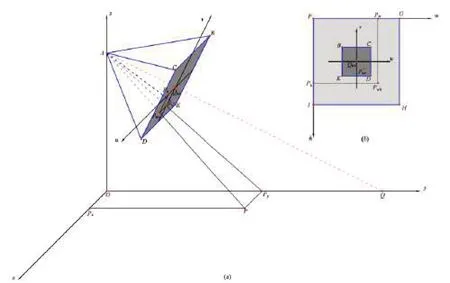
图2 相机成像示意图
在上图a 图中,点A是相机所在位置,是相机的朝向,线段AQuv和uQuvv平面分别是相机的焦距和成像平面,而xOy平面是铁轨所在平面。现在已知xOy平面上的一点P,在成像平面uQuvv上对应于点Puv。另外成像平面上的点与屏幕空间上的像素点的对应关系如上图b 图所示,Puv是成像平面uQuvv上的点,Pwh是在屏幕上与其对应的像素点。
在已知相机的位置,OA=ZA;相机的朝向,∠OAQ=θ;相机的焦距,AQuv=f;
相机成像平面的大小,BC=cw,BE=ch;屏幕分辨率,FG=sw,FI=sh。求xOy平面上一点P(xP,yP,0)在屏幕上的像素坐标Pwh(wP,hP)的情况下得出:
先将点P(xP,yP,0) 投影到相机的成像平面上的点Puv(uP,vP),由已知可得:

所以Puv的坐标为

再将成像平面上的点Puv(uP,vP) 变换到屏幕上的点Pwh(wP,hP),由已知可得:
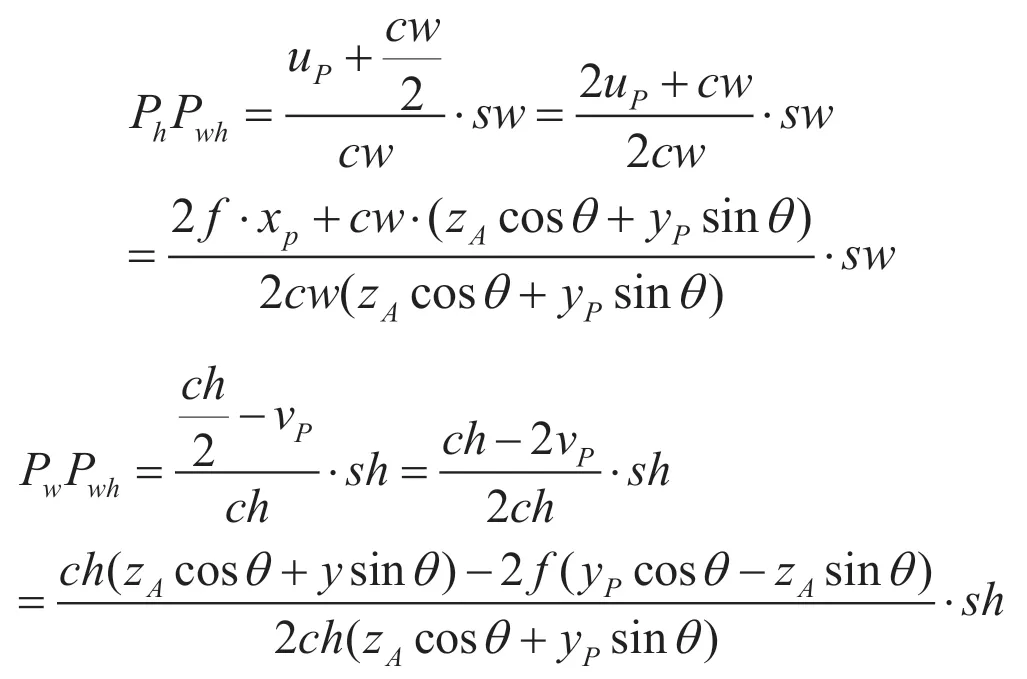
所以Pwh的坐标为

3.5 行为分析决策软件模块开发
在现行列车前方环境信息分析时,可以使用自动学习神经网络算法,对车前方的环境进行智能化检测,能够有效地判断障碍物的大小以及列车接近障碍物的速度,通过C 语言进行列车前方环境信息的决策,能有效地规避危险物,实现实时数据的交互,在障碍物确认完成之后,停止列车牵引。在保证行车安全的同时做好软件算法流程的分析工作,强化地理信息系统、全局系统时钟、列车位置信息的控制工作,可以采用对列车临界判断、运行状态判断、参照物识别等多种方式,降低地铁列车的运作成本。常见的软件算法流程如图3所示[5]。

图3 软件算法流程
4 结语
综上,在城市规模和人口的推动之下,中国轨道交通行业取得了突飞猛进的发展。绝大部分的轨道交通系统流量大、密度高、运营环境较为密闭,为了有效地解决城市交通存在的拥堵问题,要提高城市轨道交通运营的安全性和可靠性,做好设备、人员、轨道故障等分析工作虽然,相关部门已经采取有效的应对措施,但是不可避免会发生各种各样的事故。因此,为了完善城市轨道交通路障检测系统,提升地铁列车的安全性指标,应该做好地铁列车前视障碍物监测系统的研究工作,采取有效的方式,强化前视障碍物智能检测系统的优势作用,提高细节分辨率以及全天候的工作能力,实现列车的实时通讯,即时获取轨道以及列车的运行速度。
猜你喜欢
机械工业标准化与质量(2022年3期)2022-08-12 02:30:32
装备制造技术(2020年3期)2020-12-25 05:22:34
动漫界·幼教365(中班)(2020年3期)2020-04-20 11:03:27
铁道通信信号(2020年9期)2020-02-06 09:15:54
试题与研究·高考数学(2016年1期)2016-10-13 10:40:58
肇庆学院学报(2016年5期)2016-03-11 18:09:18
智能建筑电气技术(2015年5期)2015-12-10 05:52:26
数学教学通讯·初中版(2014年12期)2014-04-29 00:44:03
铁路通信信号工程技术(2014年6期)2014-02-28 16:58:31
城市道桥与防洪(2014年5期)2014-02-27 07:26:44
