
基于Fisher两类判别的机库目标识别
2020-06-30 09:08高嘉彬孙梦南
科学技术与工程 2020年15期
高嘉彬, 潘 军*, 孙梦南
(1.吉林大学地球探测科学与技术学院,长春 130026;2.北京北机机电工业有限责任公司,北京 101109)
机库是机场内用于检修飞机、保障飞行的主要建筑,是军事打击的重点,也是在遥感影像上需要被解译的重要目标之一。如何定量构建机库目标的识别特征,以及采用何种方法识别是当前需要解决的科学问题。目前,基于高分可见光遥感影像的目标识别方法,主要是利用形状、大小等几何特征而较少使用波谱特征[1-3]。文献[4]提出的机库目标识别方法也是基于空间特征而非波谱特征。对此,需要研究是否可以利用波谱特征识别高分可见光遥感影像中的机库目标。通过选取训练样本分析机库目标与其他地物之间的波谱差异,根据机库目标在特征空间上与少量地物存在一定区分难度的情况,选用Fisher两类判别法进行分类识别。针对常规的Fisher两类判别法在聚类后判别结果不够精确的情况,构建逐层剥离法对其进行改进,以实现利用波谱特征识别出高分可见光影像上机库目标的目的。
1 机库目标及其识别特征
飞机修理库,简称机库,是飞行维修区的主要建筑,机场的重要组成部分之一。机库是用于对飞机进行定期检修的大跨度单层建筑物,多为钢筋混凝土结构,数量随机场具体情况而定。机库通常位于机场的一侧,周围有停机坪,并有滑行道相连接。机库的建筑样式可分为单跨和多跨,库房面积一般较大,顶部多为钢结构,形式主要有单坡面式、双坡面式、多坡面式和拱形等。机库通常由维修机库大厅、航材库以及与之配套的办公、车间、动力站房、特种车库和餐厅等附属用房组成。
在目视解译时,通常是根据形状、大小、颜色、阴影、位置和活动等特征来识别目标[5]。这些识别特征又可以分为几何特征和波谱特征。机库在可见光遥感影像上反映出的波谱特征主要是颜色特征,是由其顶部的建筑材料涂装所决定的。在同一幅遥感影像上,机库目标通常具有相同的颜色,虽然由于建筑顶部样式等原因会产生细微变化,但总体颜色大致相同,且同一坡面一般呈单一均匀色调。这种颜色特征使得机库目标与周围背景存在差异,可以被区分识别。
在计算机解译时,目标的识别特征一般由目视解译的识别特征决定。机库目标的颜色特征实际上是构成机库目标像元的各波段地物灰度值(DN)的综合反映。而计算机目标识别的本质是对像元的重分类,且基于波谱特征的分类方法通常有阈值分割法和特征空间聚类法等[6]。对此,通过分析影像上机库目标和其他地物的像元DN的分布情况,以判断机库与其他地物之间是否具有可分性并选择适当的分类方法。
2 典型地物波谱特征分析
2.1 训练样本的选取
选用“吉林一号”卫星获取的某机场可见光卫星影像,如图1所示。该影像有蓝(B1:450~520 nm)、绿(B2:520~600 nm)、红(B3:630~690 nm)三个波段,空间分辨率0.72 m。在影像上,机库目标主要有白色和红色2种颜色的屋顶。结合研究区域内的目标情况,选取具有代表性的10类地物作为训练样本,分别记为白顶机库、红顶机库、飞机、道路、植被、裸地、跑道、停机坪、白顶建筑和红顶建筑。

图1 某机场可见光卫星影像图Fig.1 Visible satellite image of an airport
2.2 灰度分布特征
灰度阈值法是一种基于像素的灰度值对影像进行分类的方法,主要是反映单波段上目标像元的分布特征。假设目标与背景之间的像元灰度值在总体分布上存在一定差异,那么根据这种差异设定分割阈值,可以将目标与背景分开。该方法计算简单,应用广泛,对于目标与背景存在明显对比的影像十分适用[7]。通过统计训练样本在各波段上的DN得到灰度分布图(图2)。由图2可以看出,在机库目标的灰度分布区间内,也有其他较多地物的灰度分布。这表明看出,在各单一波段上机库目标与其他地物的对比并不明显,不能通过设定阈值将机库目标与其他地物分割开,即无法利用灰度阈值法对机库目标进行分类识别。

图2 各训练样本不同波段灰度分布Fig.2 Gray-scale distribution of training samples in different bands
2.3 点群分布特征
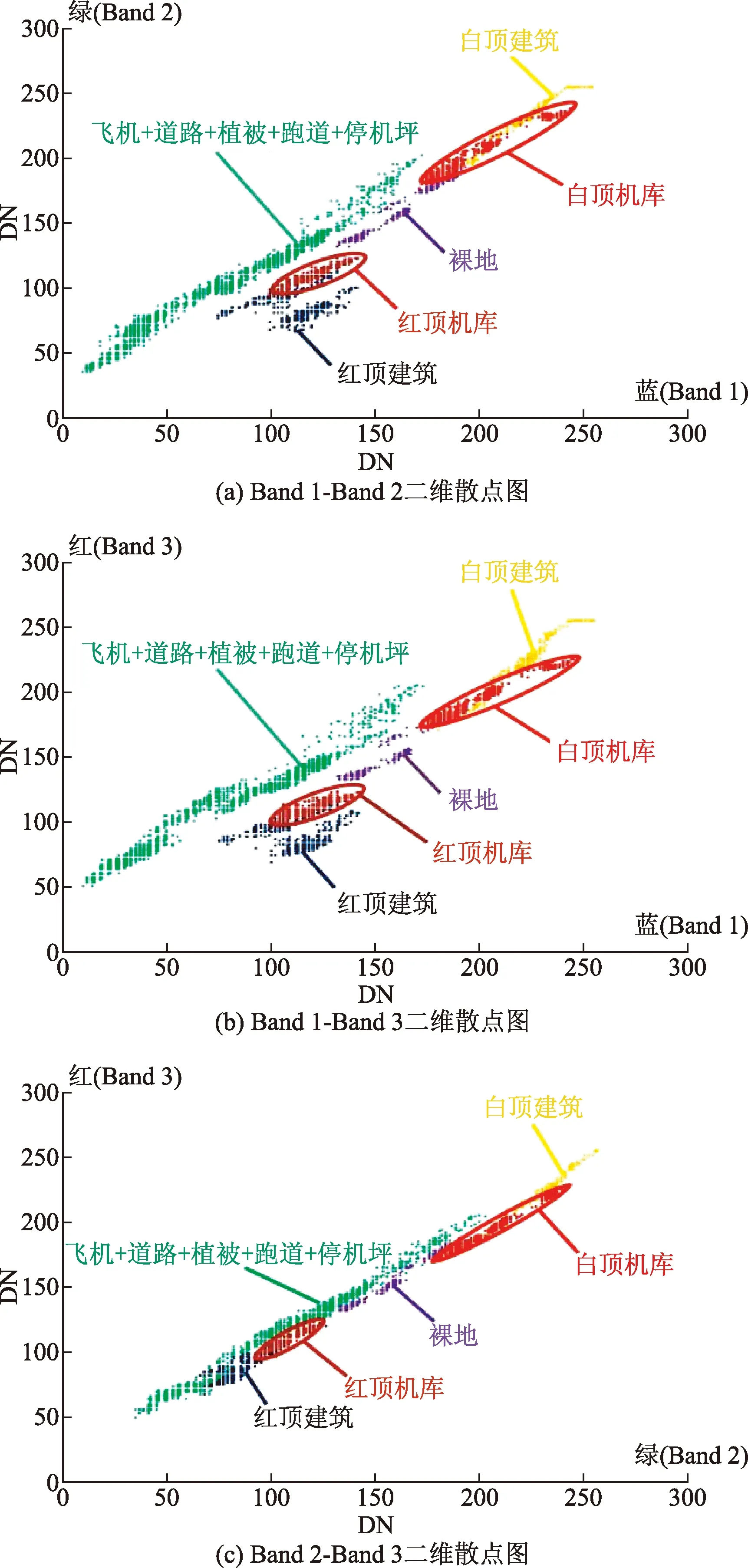
图3 各训练样本二维散点图Fig.3 Two-dimensional scatter plots of training samples
遥感影像可以看作由波段和灰度值构成的特征空间,其中波段代表特征空间坐标轴,灰度代表坐标取值,像元则是分布在特征空间上的点。与灰度阈值法不同,特征空间聚类法主要是反映了多波段下目标像元的分布特征。由于同类地物一般具有相似的波谱特性,其像元在特征空间上会聚集为点群,可以采用决策理论或统计方法将这些点群区分开。通过统计训练样本各波段的DN并将各波段两两组合,得到二维散点图,如图3所示。这些二维散点图是三个波段构成的特征空间向任意两个波段构成的二维平面的投影。这些点群在各二维平面上的分布位置不同,可以得出这些点群在三维的特征空间中是分离开的,即可以利用波谱特征识别机库目标。通过计算训练样本Jeffries Matusita和Transformed Divergence的值可以进一步判断训练样本之间区分的难易程度。这两个值大小在0~2.0,数值越大则样本越容易区分,通常认为在1.8以上即可以达到良好的区分效果。而机库目标与其他大部分地物的训练样本的值均在1.8以上,表明机库目标与其他大部分地物目标较易区分。其中,机库目标与飞机、道路、跑道、植被和停机坪等五类地物的点群较易区分;而白顶机库与白顶建筑、裸地,红顶机库与红顶建筑的点群分布相对较近且分离度均小于1.8,存在一定分离难度。这也与目视解译时观察到的情况基本一致。基于以上分析结果,分类难点主要是机库目标与少数地物之间,而在多光谱影像中Fisher两类判别法可以对类似情况实现较为准确的分类识别[8]。因此选用更适合在少数样品间分类的Fisher两类判别法对影像进行分类。
3 Fisher两类判别法
3.1 基本原理
Fisher两类判别法由Fisher在1936年提出,是根据样品的多个特征确定待分样品归属的一种监督分类方法[9]。Fisher判别的核心思想是降维,即将样品在多维变量空间上的观测值投影到低维空间(直线)上,使得两类样品的点群得以显著区分。如图4 所示的二维情况为例,设有A、B两类总体,其在各轴上的投影均有重叠,无论利用变量x1或x2,均不能得到很好区分。但是若投影到直线R上,则两类样品投影差别显著,并可找到分界点R0。这就相当于寻找线性组合R=c1x1+c2x2,使两类样品显著区分,并根据特征值x1、x2进行计算,与R0比较来判定未知样品的归属。
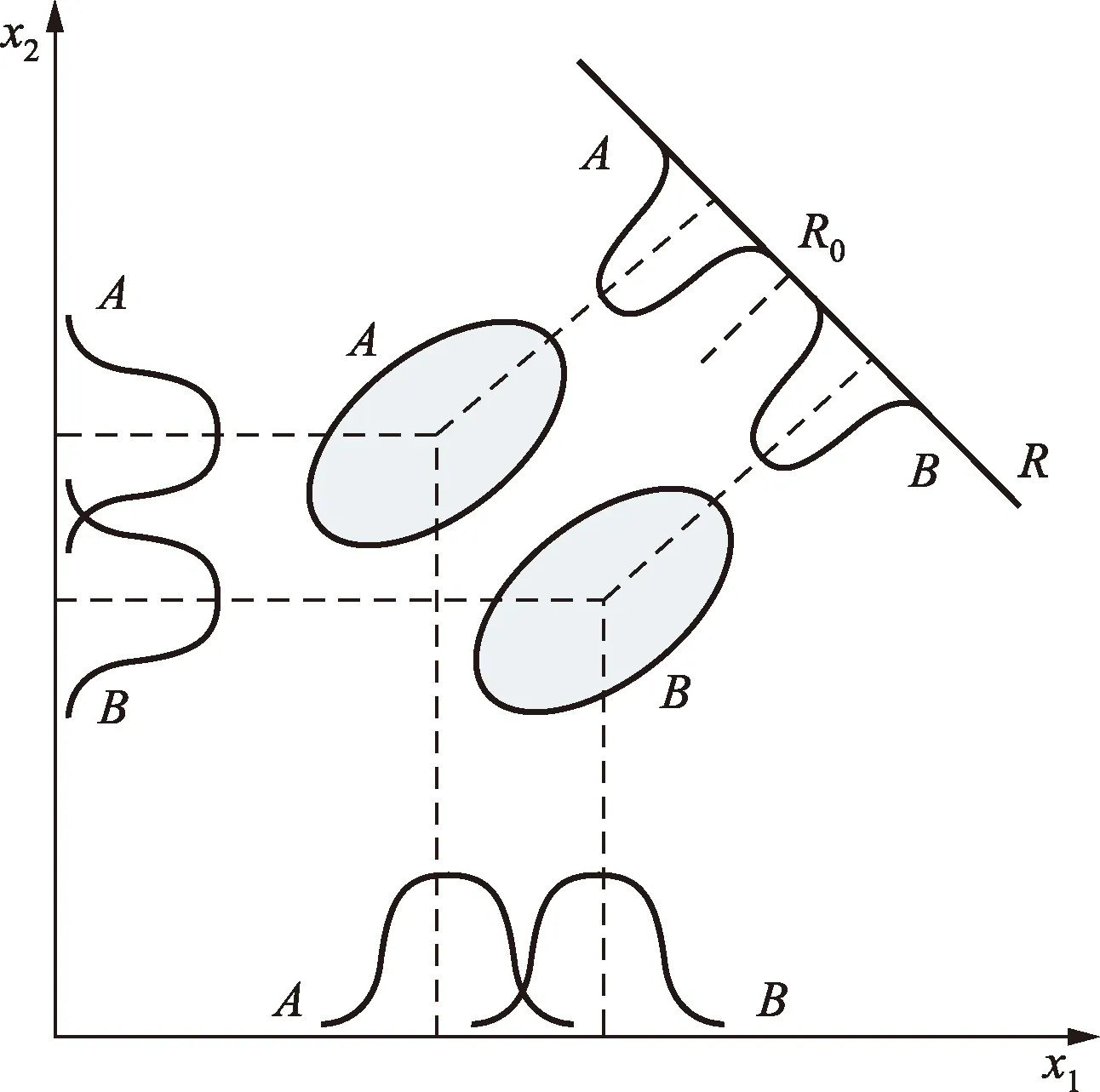
图4 Fisher两类判别原理图Fig.4 Fisher two kinds of discrimination princeples
3.2 判别函数

设判别函数为
R=c1x1+c2x2+…+cmxm
(1)

(2)
则判别函数的类间离差为
(3)
而判别函数的类内离差为
(4)
为建立最优的判别函数,应使函数类间离差最大、类内离差最小,即I=Q/F达到极大,推导可得:
(5)
式(5)中:
(6)
式(2)的矩阵形式为Lc=d。当L满秩时,有唯一解c=L-1d,从而可求得判别函数R。
3.3 判别准则
(7)
式(7)中:σA=(FA/nA)1/2,σB=(FB/nB)1/2。

对于判别效果,可以用错判率E来检验。
(8)
式(8)中:ne为错判样品个数;n为已知归属的样品数。E越小则判别效果越好。
4 实验过程及结果分析
4.1 常规的Fisher两类判别法
常规的方法是指在利用Fisher两类判别法对多类样品进行判别时的通常方法。该方法先通过对样品的聚类分析以减少每次判别时的样品数量,使得每次判别只在两到三类间进行。然后根据聚类结果,对包含目标样品的类别逐级区分,直到区分出目标样品。以下是利用常规方法进行的实验。
(1)利用各训练样本不同波段的灰度均值作为其特征空间的点群中心,通过Ward法(最小离差平方和法)进行聚类分析,如图5所示。
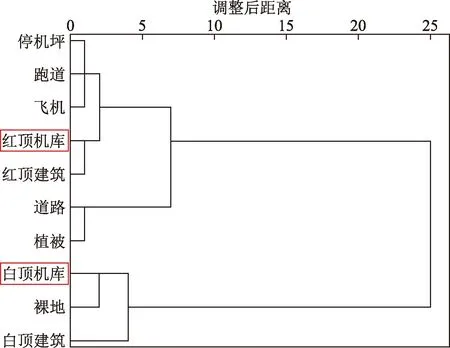
图5 10类地物聚类谱系图Fig.5 10 classes of ground objects cluster genealogy
(2)根据聚类结果以每次分类为节点,利用Fisher两类判别法逐级分类识别。①将停机坪、跑道、飞机、红顶机库、红顶建筑、道路、植被与白顶机库、裸地、白顶建筑进行分类识别,记为1-1;将白顶机库、裸地与白顶建筑进行分类识别,记为2-1;②将停机坪、跑道、飞机、红顶机库、红顶建筑与道路、植被进行分类识别,记为2-2;③将白顶机库与裸地进行分类识别,记为3-1;④将停机坪、跑道、飞机与红顶机库、红顶建筑进行分类识别,记为3-2;将红顶机库与红顶建筑进行分类识别,记为4-1。
(3)将B1、B2、B3三个波段的值分别记为x1、x2、x3,计算出Fisher判别函数式和判别系数,结果如表1所示。
(4)将Fisher判别结果代入到影像中运算得到结果,如图6所示,其中红色标记部分为被识别出的像元。
4.2 逐层剥离Fisher两类判别法
从利用常规方法的实验中可以看出影像中被错分的像元较多。这是因为聚类后形成的新点群集合包含了多类样品,导致在判别时投影方向的选择和函数的建立并不一定针对目标样品,使得在新点群间进行判别分类时产生误差。这些误差逐步累积最终影像了分类结果的精度。针对这一情况,构建逐层剥离法对其进行改进。
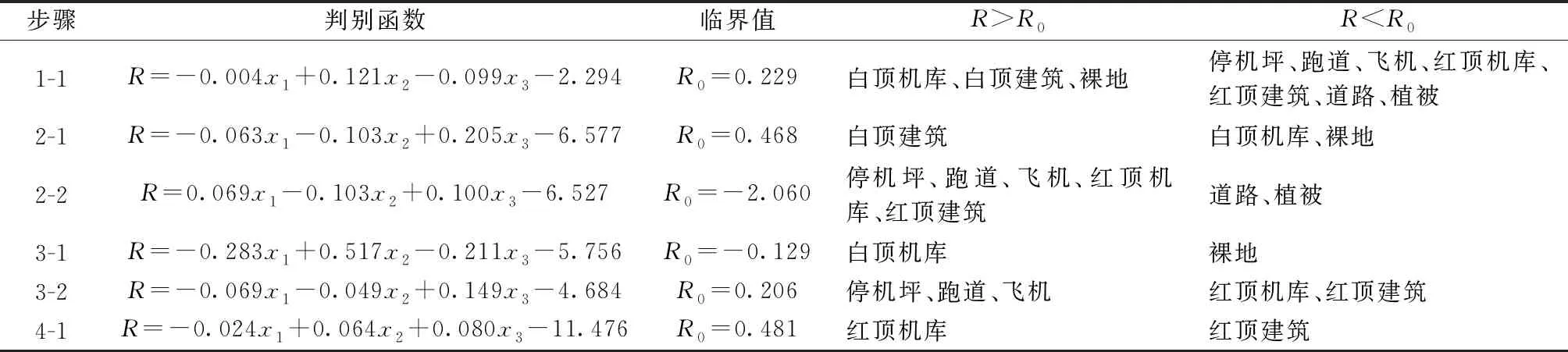
表1 常规Fisher两类判别结果表Table 1 Two classes of discriminant result for conventional Fisher
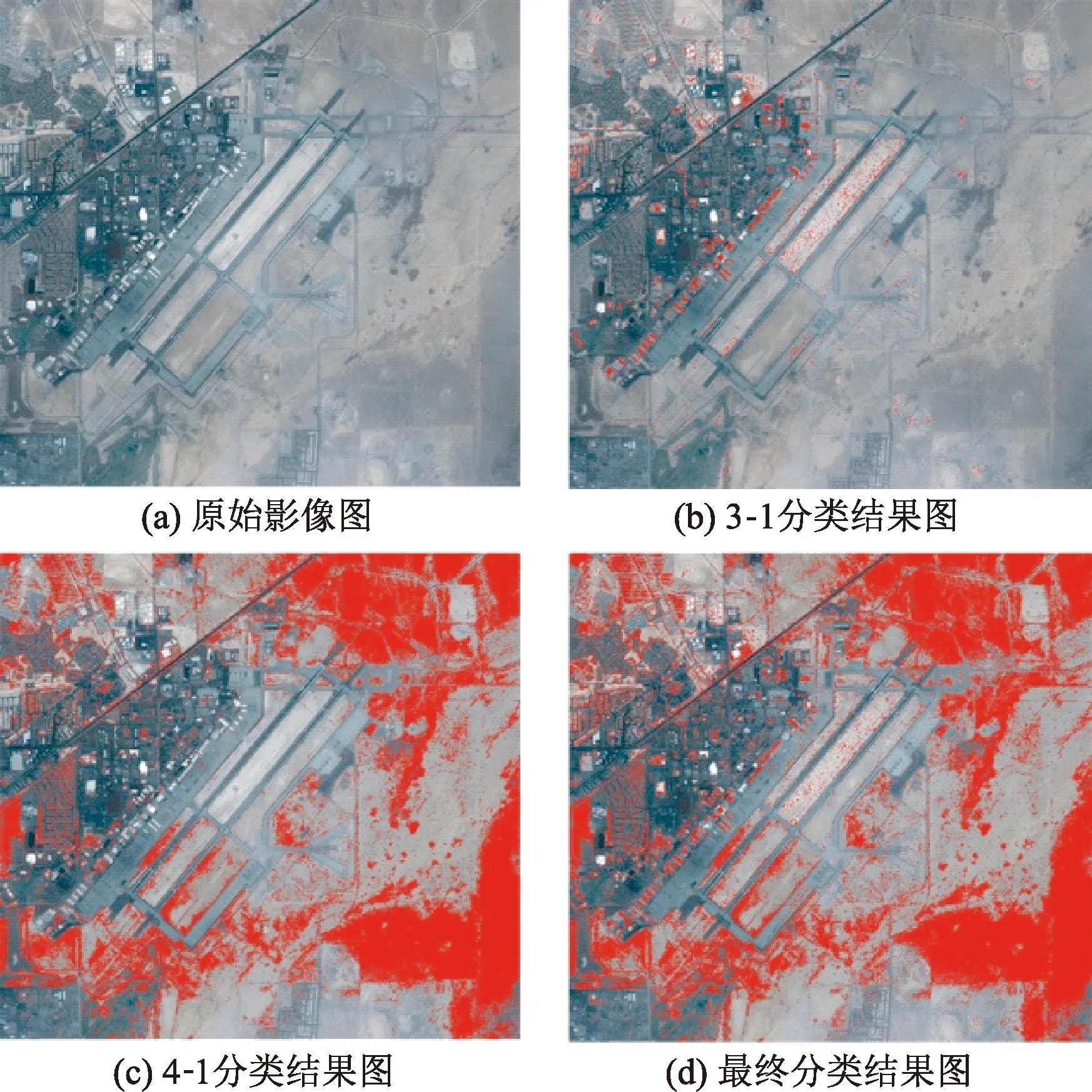
图6 常规Fisher两类判别结果Fig.6 Result of two classes of discriminant method for conventional Fisher
逐层剥离法是指以识别目标为核心,不进行聚类分析,而是直接将目标样品与其他地物两两之间逐个判别分类,通过剥离其他地物的干扰,即在特征空间中划定一个只包含目标点群的区域达到分类识别的目的。这种方法实质上仍然是在两类样品间进行分类判别,但是判别依据仅是各个样品的点群分布特征且只在两类样品间进行,这就使得无论是投影方向的选择和判别函数的建立都要更加准确,识别精度也就更高。以下是利用常规方法进行的实验。
(1)将红顶机库与白顶机库进行分类,记为1-1。
(2)将白顶机库分别与其他训练样本进行分类,分别记为2-1(飞机)、2-2(道路)、2-3(植被)、2- 4(裸地)、2-5(跑道)、2- 6(停机坪)、2-7(红顶建筑)和2- 8(白顶建筑)。
(3)将红顶机库分别与其他训练样本进行分类,分别记为3-1(飞机)、3-2(道路)、3-3(植被)、3- 4(裸地)、3-5(跑道)、3- 6(停机坪)、3-7(白顶建筑)和3- 8(红顶建筑)。
(4)将B1、B2、B3三个波段的值分别记为x1、x2、x3,计算出Fisher判别函数式和判别系数,结果如表2所示。
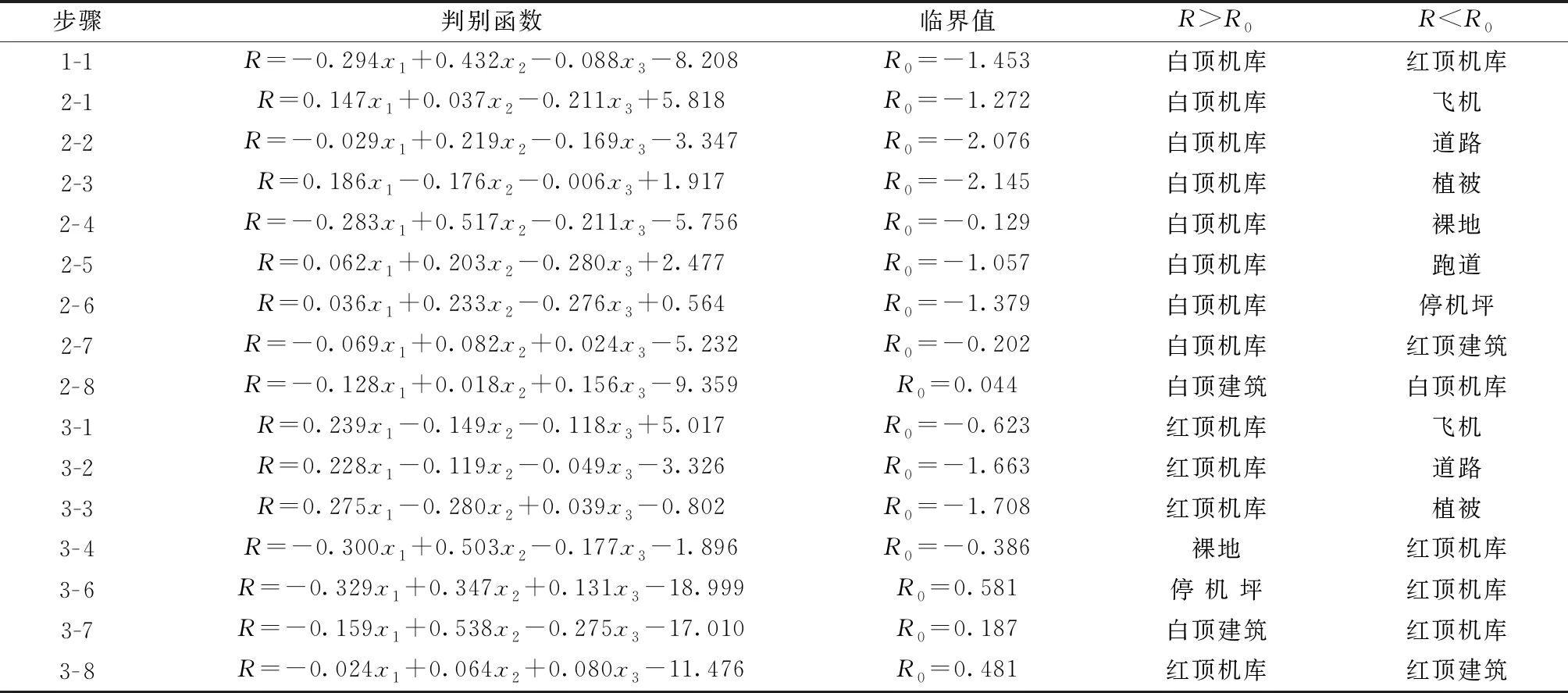
表2 逐层剥离法Fisher判别结果Table 2 Fisher discriminant result of layer-by-layer stripping method
(5)将Fisher判别结果代入到影像中运算得到结果,如图7所示,其中红色标记部分为被识别出的像元。
4.3 实验结果分析
通过目视解译和掌握资料得出该机场共有机库19座,如图8所示,其中黄色标记部分为机库,并以此作为验证识别结果精度的标准。经过分别统计两种方法结果中的机库实际总像元数、分类识别总像元数、正确分类识别像元数和错误分类识别像元数,并计算正确分类/分类总数、正确分类/实际总数和E得到基于像元的分类结果统计如表3所示。其中,逐层剥离法与常规方法相比较,分类识别
的总像元数由14 786 495个降至2 220 938个,但正确分类识别的像元数由83 428提高至83 656个,正确分类与分类总数的比例提高了3.21%,且E下降了0.21%。这表明逐层剥离法的分类精度和效率均优于常规方法。通过目视解译对比分析发现,逐层剥离法对影像中的裸地、植被等地物具有更好的区分效果。这是因为逐层剥离法能够减少常规方法中因聚类分析后判别而产生的误差,并且通过减少每次参与判别的样品数以提高判别精度。但是无论是常规法还是逐层剥离法,在最后的结果中仍有其他地物的像元被错分进来。这表明仅利用波谱特征并不能完全准确识别出机库目标,在日后研究中可以进一步结合机库目标的几何识别特征提高识别精度。
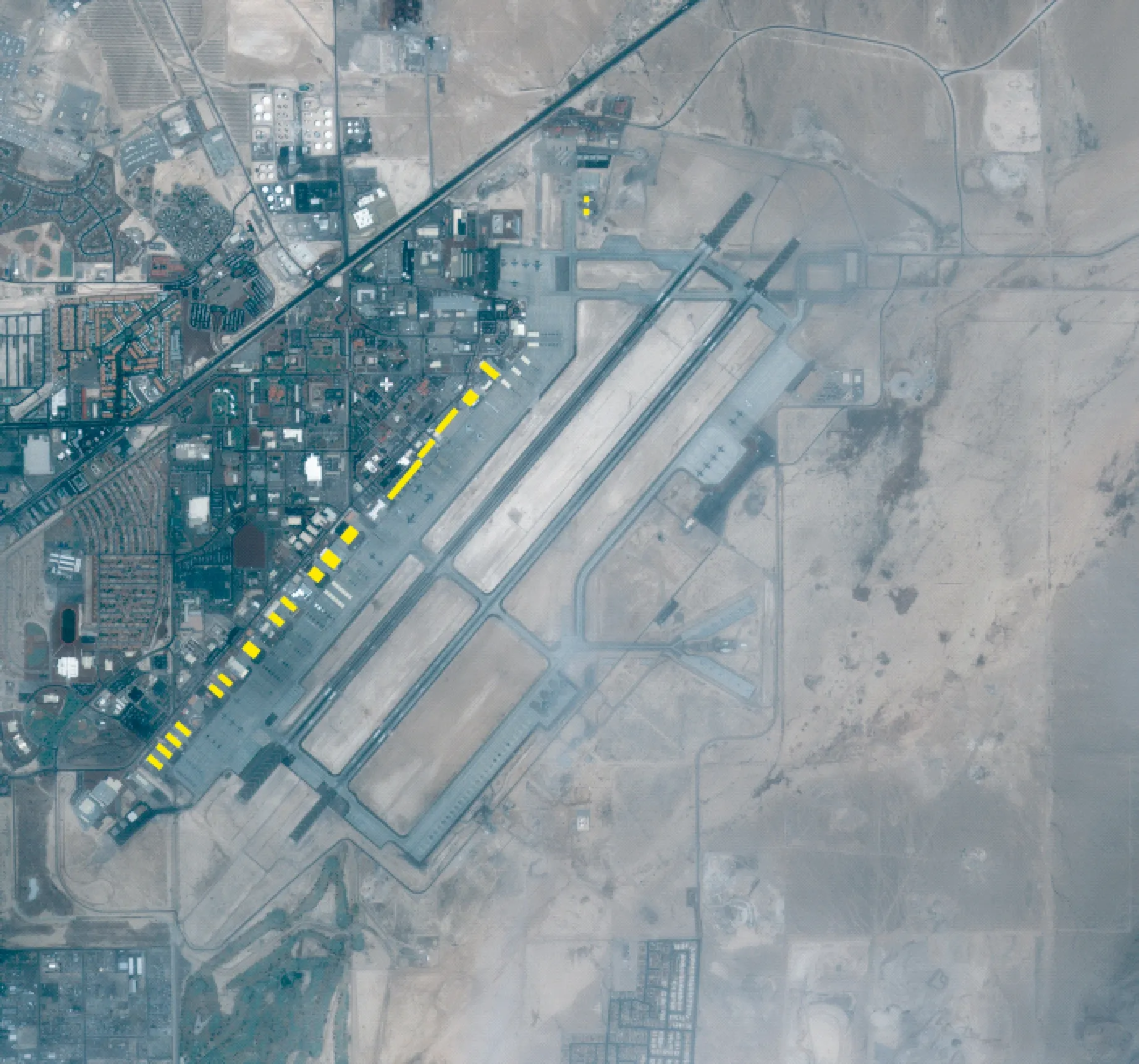
图8 某机场机库目标位置示意Fig.8 The target location of an airport hangar

表3 基于像元的分类结果统计Table 3 Pixel-based statistic of classification results
5 结论
通过上述研究,得出以下结论。
(1)在高分可见光遥感影像中,利用波谱特征并结合Fisher两类判别法可以有效识别出机库目标,正确识别像元数占机库目标实际像元数的77%以上。
(2)在针对多类样品进行Fisher两类判别时,逐层剥离法虽然在计算上较常规方法略微复杂,但错分像元数能够减少85%以上,具有更高的识别的精度和效率。
猜你喜欢
指挥控制与仿真(2021年3期)2021-06-15
人民交通(2020年10期)2020-06-09
科技创新与应用(2020年6期)2020-02-29
小猕猴学习画刊(2019年9期)2019-11-08
航空维修与工程(2019年3期)2019-09-10
领导决策信息(2018年5期)2018-03-20
现代电子技术(2016年23期)2017-01-12
北京理工大学学报(2016年6期)2016-11-22
幼儿教育·父母孩子版(2009年2期)2009-07-01
