多电飞机混合作动系统工作模式优化分析
2020-06-29 23:57范凯
科技创新与应用 2020年20期
范凯
摘 要:文章基于现阶段,多电飞机飞行控制系统结构设计中,所实践的非相似余度混合作动系统,对传统液压作动器、电动静液作动器所构建的作动系统工作模式优化展开研究。同时通过工况条件、系统功率特点、仿真参数分析等方式,对多电飞机混合作动系统新型工作模式的可行性做出简单阐述,希望给予相关从业者建议与参考。
关键词:多电飞机;混合;作动系统;工作模式
中图分类号:V227 文献标志码:A 文章编号:2095-2945(2020)20-0044-02
Abstract: This paper is based on the optimization of the working mode of actuation system constructed by traditional hydraulic actuators and electro-hydrostatic actuators in the non-similar redundancy mixed-action phase practiced in the structural design of the multi-electric aircraft flight control system at this stage. At the sametime, through working conditions, system power characteristics, simulation parameters analysis and other methods, the feasibility of the new working mode of the hybrid electric aircraft cooperative system is briefly described, in the hope of providing suggestions and references for relevant practitioners.
Keywords: multi-electric aircraft; mixing; actuation system; working mode
引言
我國现有多电飞机内部设计中,会利用具有稳定性、性能优势明显等特点的混合作动系统,健全多电飞机飞行控制体系。在此背景下,为进一步完善多电飞机混合作动系统功能,相关人员应重视该系统工作模式的创新改进工作。因此,本文对多电飞机混合作动系统工作模式优化展开分析,旨在解决该系统运行中,控制命令执行能耗大、不同工况条件下工作效率难以保障等问题。
1 多电飞机混合作动系统相关概述
在全电飞机发展中,多电飞机是在多电理论、相关产品、技术革新中,所衍生出的过渡型飞机。由于多电飞机需通过混合能源驱动实现,所以在多电飞机应用中,应预先建立混合作动系统。而功率电传、阀控液压伺服作动器是混合作动系统的主要组成部分,可用于飞机主飞行控制系统中。并且多电飞机混合作动系统,在维持系统安全、稳定性的基础上,节约液压源,以此减轻飞机重量,优化多电飞机能源系统性能[1]。同时该系统基于非相似余度配置,可高效控制系统内部故障。
2 混合作动系统优化思路
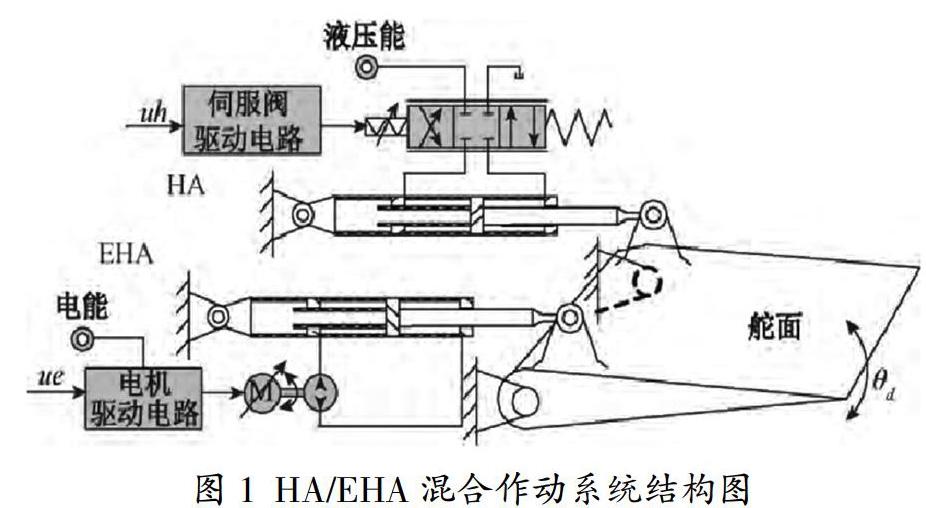
电动静液作动器(EHA)、液压作动器(HA)所构成的混合系统,其工作模式可分为“主动+主动”、“主动+被动”、“主动+空载”等模式。该混合作动系统结构图,如图1所示。从图1可见,多电飞机混合作动系统内部,含有的作动通道互为对方的非相似余度。该种设置形式,可有效提高飞行系统稳定性,且在不同应用场景中,系统能耗特性存在一定差异性。结合其单通道能耗特点,可以看出电动静液作动器,在面临节流效应时,系统控制命令生成、执行能耗明显大于传统液压作动器。但是在多电飞机舵面需要在加载力度增加,以及舵面负载抗衡期间,将舵面控制在某一水平位置时,则电动静液作动器能耗,却小于传统液压作动器[2]。因此,多电飞机混合作动系统的优化思路,是基于传统液压作动器、电动静液作动器面临不同工况时,其效率、能耗变化特点,改进通道工作模式,以此将多电飞机能耗控制在合理范围内。
具体来说,在多电飞机飞行期间,按照其速度x、实际负载力y,将飞机工况确立在不同的四个象限内。在飞机处于一、三象限的工况类型中,混合作动系统能耗在面临空气阻力后,会进入逆载状态做正功。而在二、四象限,在空气动力影响下,飞机舵面会产生摆动现象,所以系统因空气做功,面临顺载工况。由于多电飞机混合作动系统在顺载情景中,电动静液作动器能量回收难度较大,可通过正处于发电状态的传统液压作动器,将能量转化、回收。
3 多电飞机混合作动系统工作模式优化
基于上述多电飞机混合作动系统优化思路,在创新系统工作模式时,相关人员可通过多电飞机负载力、活塞杆速度。探索混合作动系统新型工作模式。并根据不同工况中的x、y变化数值变化,判断子通道实际工作效率。同时在电能回馈环节,利用x、y的方向,辨别顺载、逆载工况。具体来说,第一,默认工作模式中,若电动静液作动器为飞行控制系统的主要通道,而传统液压作动器为旁通。则在多数工况中,电动静液作动器工作效率,明显高于传统液压作动器。第二,判断工况属于逆载、顺载,在顺载时,若应用默认工作模式,并使用传统液压作动器完成能量回收工作。在逆载时,根据系统更换条件,切换系统主、次通道,以此获取多电飞机混合作动系统中,传统液压作动器、电动静液作动器在各类工况中的效率指数。
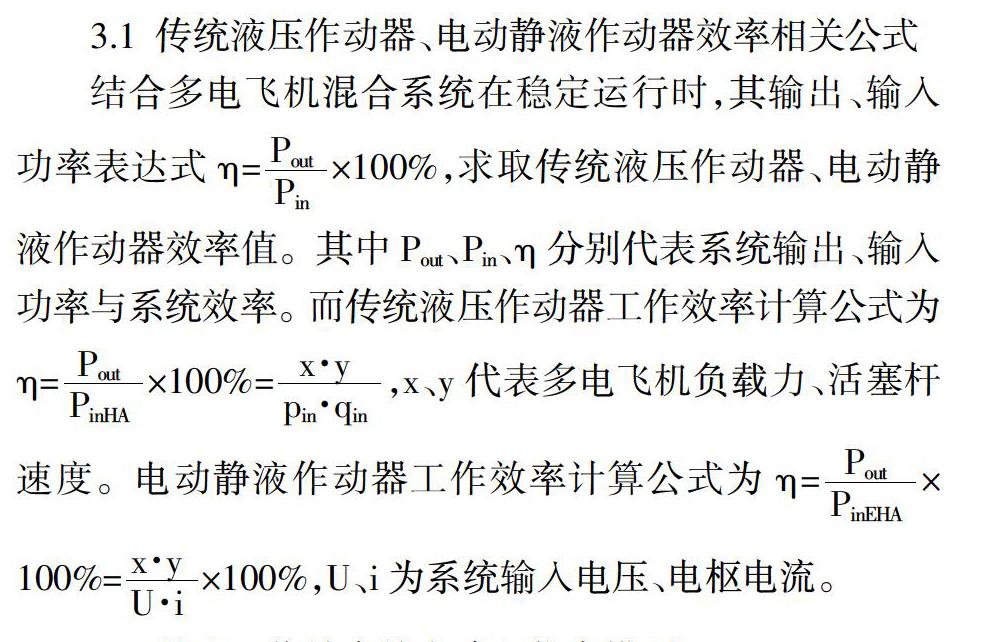
3.1 传统液压作动器、电动静液作动器效率相关公式
结合多电飞机混合系统在稳定运行时,其输出、输入功率表达式η=×100%,求取传统液压作动器、电动静液作动器效率值。其中Pout、Pin、η分别代表系统输出、输入功率与系统效率。而传统液压作动器工作效率计算公式为η=×100%=,x、y代表多电飞机负载力、活塞杆速度。电动静液作动器工作效率计算公式为η=×100%=×100%,U、i为系统输入电压、电枢电流。
3.2 基于工作效率特点建立仿真模型
通常情况下,在分析多电飞机混合作动系统工作效率特点时,需预先使用速度x、负载力y,以及系统效率η,制作效率工作曲面。但由于此种方法实践中,人工绘制曲面时总体工作量多,影响混合多动系统效率计算进度[3]。因此,可基于仿真技术,应用MATLAB、AMESim软件,建立仿真模型。相关人员可在MATLAB、AMESim软件系统内,输入速度x、负载力y具体数值,在通信版块将数值信息传输至MATLAB后,对混合作动系统工作模型进行仿真,并将仿真结果,回传至MATLAB。从而根据其软件内部所记录的数据,绘制工作效率曲面。
具体来说,传统液压作动器仿真参数中,最大输入电流为50m/A,等效阻尼比为0.8,且阀频宽为59Hz。伺服阀等效增益,约为2.32×10-6,放大器增益为20,油液弹性模量1×1010pa。另外,传统液压作动器在仿真模型中,其活塞直径变化为60mm,舵面的等效质量4×105千克。而电动静液作动器仿真参数中额定电压、额定电流分别为270V、50A,电枢电阻是0.6Ω,电枢电感为59H。
根据传统液压作动器、电动静液作动器仿真参数,使用曲线绘制对比不同工况中,系统效率变化情况。研究发现,由于传统液压作动器、电动静液作动器工作效率特点的差异性,在消毒指数大于65%时,电动静液作动器工作效率明显大于传统液压作动器。因此,在多数工况总,多电飞机混合作动系统中,电动静液作动器应用优势较为明显。并且该阶段,传统液压作动器工作效率、负载力 y成正比,卻与速度x没有作用关系。而电动静液作动器则与速度x、负载力y,存在非线性关系。在速度x在50~100mm/s每秒时,负载力y为20~45kN时,该系统工作效率较高。基于此,在优化多电飞机混合作动系统工作模式的过程中,相关人员可按照各系统在不同工况中,其工作效率变化规律,灵活调整通道工作场景,以此减少飞机飞行控制系统中,系统变得无功功率,增强系统能耗特性。
3.3 明确工况切换条件
为在多电飞机混合作动系统应用中建立自动适应工况的系统工作模式。相关人员需明确传统液压作动器、电动静液作动器在面对不同工况时的切换条件。首先,可将上述系统,放置于同一工况场景中,对比其工作效率。实验显示,在a、b、c工况中,电动静液作动器在b工程场景中,工作效率较高,在a工况场景中,传统液压作动器工作效率高于电动静液作动器。而面对c工况时,二者工作效率差异不明显。所以在应对c工况时,可集成应用HA+EHA的工作模式,以增强系统动态响应、抗压能力。其次,在实现混合作动系统自适应工况,可通过速度x、负载力y数值,协助系统判断工况类型,从而切换系统通道。为此,相关人员可利用a、b、c工况场景的交界处,作为自适应工况工作模式的切换依据。最后,在传统液压作动器、电动静液作动器系统通道,工作效率均保持在高效状态时,则系统能耗可控制在合理范围内。
4 结束语
综上所述,本文结合该系统组分中的传统液压作动器、电动静液作动器,在不同工况条件下的工作效率特性。尝试建立自适应工况的系统工作模式,并且在工程模式创新中,节约系统能源损耗。且仿真实验表明,该工程模式可行性较强,可用于多电飞机混合作动系统工作模式创新改进中。因此,相关人员在混合作动系统功能完善中,可利用此工作模式,凸显多电飞机混合作动系统功能优势。
参考文献:
[1]焦宗夏.大型飞机电液动力控制与作动系统新体系基础研究[J].液压与气动,2018(5):66-67.
[2]杨建忠,杨珍书,孙晓哲.机电作动系统故障影响分析与故障检测方法[J].微特电机,2018(006):73-79.
[3]焦宗夏,孔祥东,王少萍,等.大型飞机电液动力控制与作动系统新体系基础研究[J].中国基础科学,2018(2):23-25.
[4]邢卉丽,杨善水,戴高乐,等.多电飞机配电系统TTP/C总线应用技术研究[J].南京航空航天大学学报,2018(3):33-36.
猜你喜欢
上海师范大学学报·自然科学版(2022年3期)2022-07-11
学苑创造·A版(2019年8期)2019-08-15
华东师范大学学报(自然科学版)(2019年3期)2019-06-24
亚太教育(2016年31期)2016-12-12
中国检察官·司法务实(2016年11期)2016-12-05
法制与社会(2016年32期)2016-12-01
华人时刊(2014年6期)2014-07-25