SMA丝驱动的手指康复机器人设计及实验研究
2020-06-29 12:142刘凯赵东标
计算机测量与控制 2020年6期
2刘 凯赵东标
(1.南京航空航天大学 机电学院,南京 210016; 2.东北林业大学 机电工程学院,哈尔滨 150040)
0 引言
正常人手指的运动是由中枢神经系统控制多条肌肉从而实现不同的手指功能运动[1]。目前随着人们生活节奏的加快以及不规律,上肢神经卡压、脑卒中等疾病不断出现,造成了患者多种神经功能的损伤,使患者失去了对手指运动的控制,影响了患者的工作能力和生活品质。国内外专家提出可以通过高强度、重复性的手部运动训练刺激大脑皮质层来帮助患者逐渐恢复手指运动功能[2-3]。因此将机器人技术与康复理论相结合,研制稳定可靠地手指康复机器人来辅助手部关节及手指屈曲伸展运动的康复训练,加快人手运动康复速度,在康复医学领域具有广阔的应用前景。
近年来,手指康复机器人的设计主要采用外骨骼结构,其驱动方式主要有绳索驱动[4-8]、气动驱动[9-12]、形状记忆合金丝驱动[13-14]等。2013-2017年韩国首尔大学机器人实验室[15-16]研制出了由筋线驱动的可穿戴手套Exo-Glove Poly,采用聚合物和纤维织物制作而成,筋线分布模拟手指肌腱。Exo-Glove Poly内置控制器,可以接受使用者脑部发出的电信号,然后通过马达驱动柔性手套。食指和中指掌侧仅采用一根筋线驱动,可以实现两指的协同运动。经试验,该机器人结构简单轻便,易于穿戴,可抓握10 N的物体并且适应多种不规则形状的物体。2015-2016年[11-12],新加坡国立大学研制出气动柔性执行器驱动的手指康复机器人。该机器人采用气动纤维增强软体执行器,以硅橡胶为制作材料,通过处理采集执行器内部压力和弯曲角度等信号,控制腔内压力大小,从而改变执行器弯曲角度。在增压过程中,执行器可以产生足够的力来辅助患者在不同人物中完成手指闭合和抓取运动。控制部分采用表面肌电信号(EMG)和射频识别技术(RFID)来获取使用者的运动意图,从而控制手指康复机器人完成相应运动。2013-2016年[17],瑞士苏黎世理工学院采用三层滑动弹簧片的结构来传递直线电机提供的驱动力,从而带动手指实现运动。直线电机直接驱动位于中间层的主动滑动弹簧片产生位移,导致三层弹簧片之间产生相互作用力,使得弹簧片弯曲。经验证,该机器人可以举起1 L的矿泉水。
目前手指康复机器人的研究已经逐渐脱离刚性的外骨骼结构,采用贴合手指的无关节柔性设计,具有高效、高柔性、便携性高等优点,已成为国内外研究热点。本文在手指生物结构分析的基础上,提出了一种SMA丝驱动的柔性手指康复机器人结构,建立了康复机器人的运动学和力学模型。试验研究了手指康复机器人的运动性能和抓握性能。
1 SMA驱动康复机器人结构设计
手指康复机器人的结构设计是建立在人手生物结构的基础上,同时需要考虑人体工程学和临床康复的需求。合理的结构才能更好地辅助人手进行连续的训练活动,最大程度地实现康复功能[18]。
1.1 手指生物仿生基础
手指的运动依赖于其内部肌肉、韧带、滑车等结构之间复杂的协同和拮抗作用。除拇指外的四指均具有四个自由度,远端指间关节(DIP)和近端指间关节(PIP)为单自由度的铰链连接,可实现手指在矢状面内的屈曲伸展运动;掌骨关节(MCP)为两个轴线垂直相交的转动自由度的鞍型连接,不仅可实现矢状面内的屈曲伸展,还可以实现冠状面内的外展内收运动。拇指主要有掌指关节(MCP)和指间关节(IP)。
手指肌肉由肌腱和肌腹组成。肌腱用于连接肌腹和骨骼,使肌肉附着并固定在骨骼上,但是肌腱本身不具备收缩能力,只是将肌腹收缩产生的力传导至骨骼,类似于绳索传动的方式。
根据肌肉起点的不同,可以将手指肌肉分为外在肌和内在肌。手指生物结构如图1所示。外在肌(指深屈肌FDP、指浅屈肌FDS、指伸肌EDC)的起点在前臂,通过较长的肌腱与手指骨骼相连,是手指关节屈曲伸展的主要动力来源。内在肌(蚓状肌LU、尺侧肌UI、桡侧肌RI)的起点在手指内部并直接与骨骼相连,主要负责关节处的约束平衡和微调,控制手指完成精细操作[19]以及实现手指的外展内收运动等。表1总结了四指内部主要肌肉的功能。
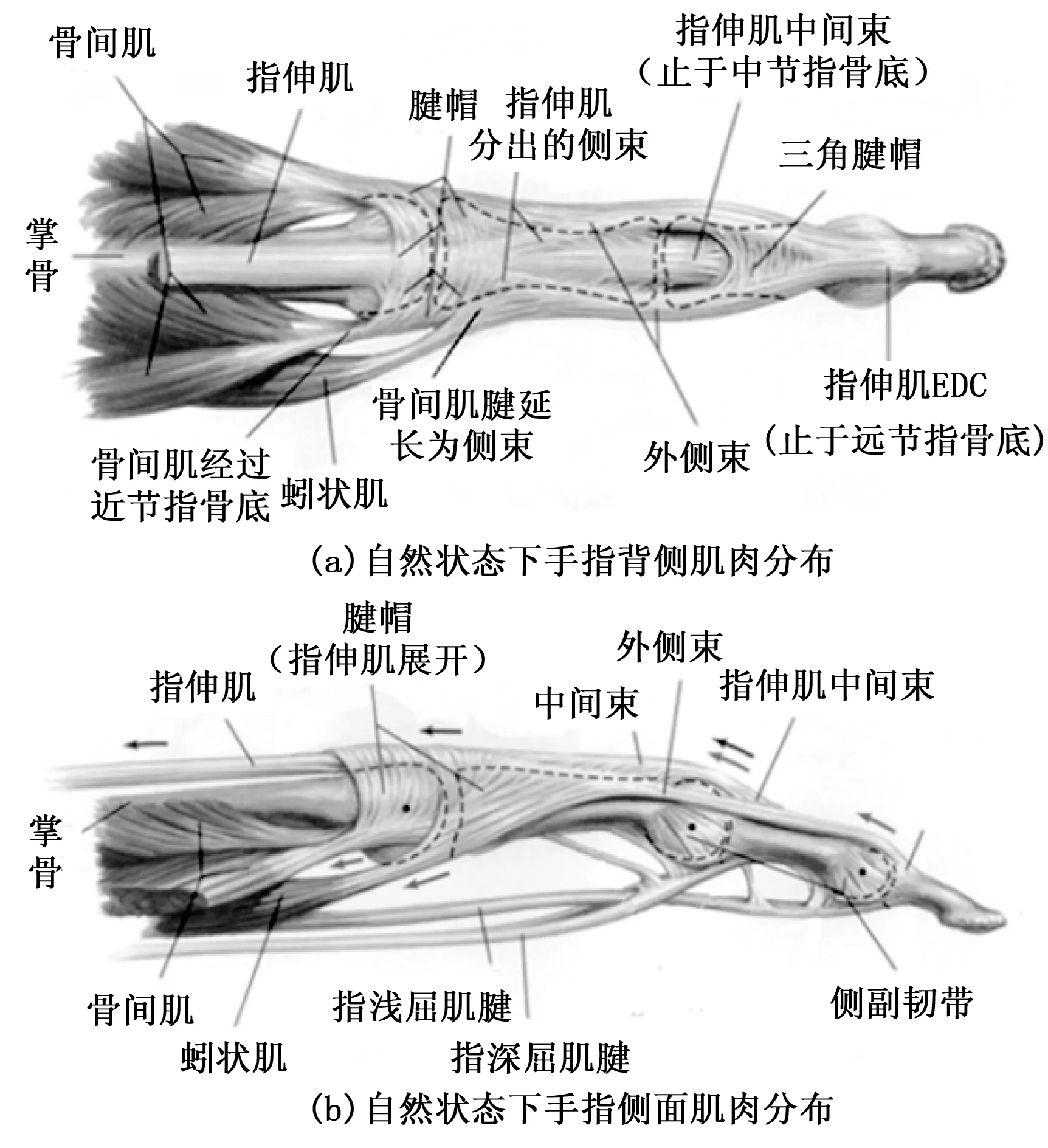
图1 手指生物结构图
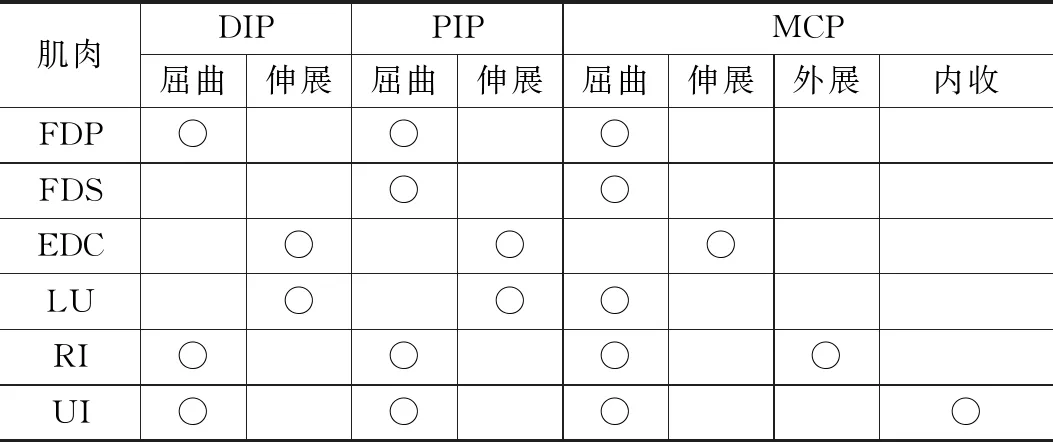
表1 四指主要肌肉功能
人手的运动自由度较多,手指运动功能的康复需要康复机器人顺应手指自身屈曲伸展运动。因此,对手指生物结构及其运动规律的研究,是手指康复机器人结构设计的基础,也是康复策略和评价机制构建的前提。
1.2 手指康复机器人结构设计
1.2.1 布丝方式
根据1.1节的手指生物仿生基础并进行一定的简化来设计康复机器人内部的布丝方式。手指的屈曲运动主要由掌侧起源于DIP关节处的指深屈肌FDP提供驱动力,而其伸展运动则由背侧的指伸肌EDC提供,如图2(a)所示。因此,在手指掌侧屈肌腱和背侧伸肌腱对应的位置上各排布一组牵引线,将其一端与机器人上指尖固定套相连,另一端与SMA丝致动器相连,通过SMA丝的交替加热收缩来模拟屈伸肌腱,从而驱动三个关节,如图2(b)所示。
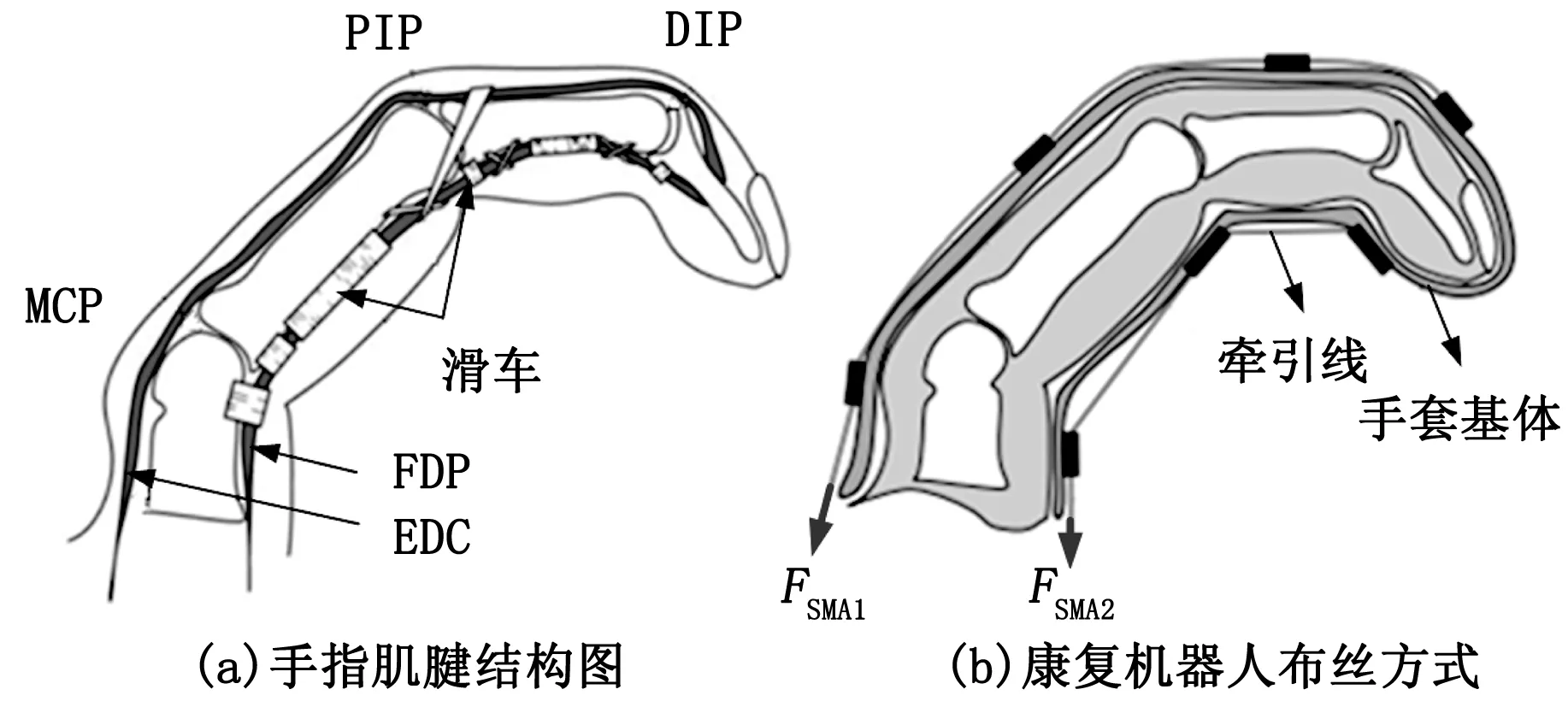
图2 手指康复机器人布丝仿生原理及示意图
图2(b)中黑色区域是模拟手指内部用于固定肌腱的滑车,用于固定丝线,防止丝线在驱动过程中偏移或滑落手指并确定其运动路径。本文丝线选用线号为3.0的鱼线,可最大承受50 N的拉力。
1.2.2 手指康复机器人基体设计
由于在手指屈曲伸展过程中,人手指关节轴线和旋转中心是在不断变化的,因此刚性结构的康复机器人无法完全贴合手指运动,甚至可能会对手指造成二次伤害。理想的手指康复机器人结构应该能适应不同患者的手指外形差异,同时具有柔软、轻便等优点。因此,综合考虑穿戴方式和舒适性,本文采用柔性材料TPU作为康复机器人的基体,以手套为原型设计其无关节软体的结构,不仅可以较好地贴合手指运动,还保证了耐磨性,如图3所示。
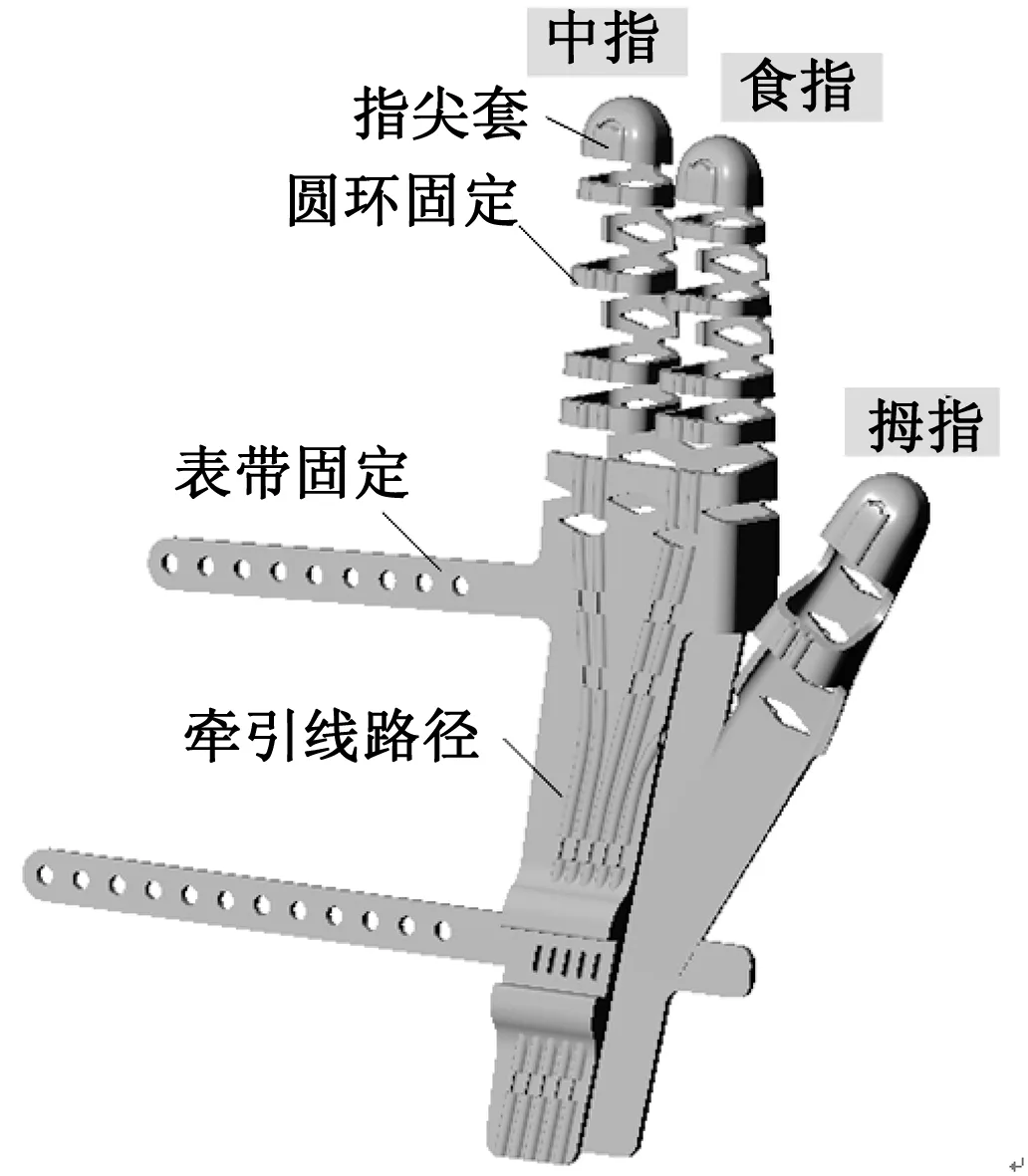
图3 手指康复机器人基体设计
由于在日常生活中,食指、中指和大拇指提供了主要的运动和抓握力的来源,因此本文的基体设计仅考虑三指。基体前侧用圆环结构,起到固定手指和丝线的作用,并给手指屈曲留有一定的空间。基体背侧采用菱形结构,可以被拉伸从而适配不同人手指的长度。手掌位置处设有丝线路径规划的导程,避免丝线相互缠绕。除此之外,在虎口和手腕相应位置处,均设计有搭扣的表带结构,可以根据实际手长手宽尺寸进行调节,从而固定手指与基体的连接。
1.2.3 驱动机构
由于SMA丝应变较低(最大应变仅为5%),因此为了提供足够的收缩量,每根SMA丝所需的长度远大于前臂长度。针对该问题,设计了往复折返布丝式增程机构,放置在驱动盒内,来确保满足手指屈伸变形的行程要求,如图4所示。
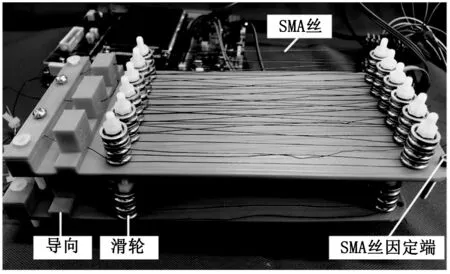
图4 增程机构
增程机构主要采用滑轮装置,SMA丝缠绕在滑轮组上,尽量保证绷直,减少SMA丝收缩行程的浪费。一旦SMA丝受热收缩,就会带动与手指直接贴合的牵引线移动,实现对手指关节的驱动。增程机构的大小为8*25 cm2,滑轮外径为12 mm。在驱动盒内还装有风扇,保障在SMA丝处于过热状态时能够及时散热。
2 SMA驱动康复机器人模型
SMA丝加热收缩后的应力和应变直接驱动手指三关节实现抓握等运动。仿生康复手套的运动学模型是研究了SMA丝应变和关节角度之间的关系。力学模型则是研究了SMA丝应力和抓握时指尖力的大小,目的是获取所能抓握物体的最大力。
2.1 手指康复机器人运动学模型
为了便于分析,将手指生理结构简化为开链的多刚体系统。手指指骨(远端指骨,中节指骨,近端指骨和掌骨)为四段相连的刚体,各节段用矩形表示,如图5所示。
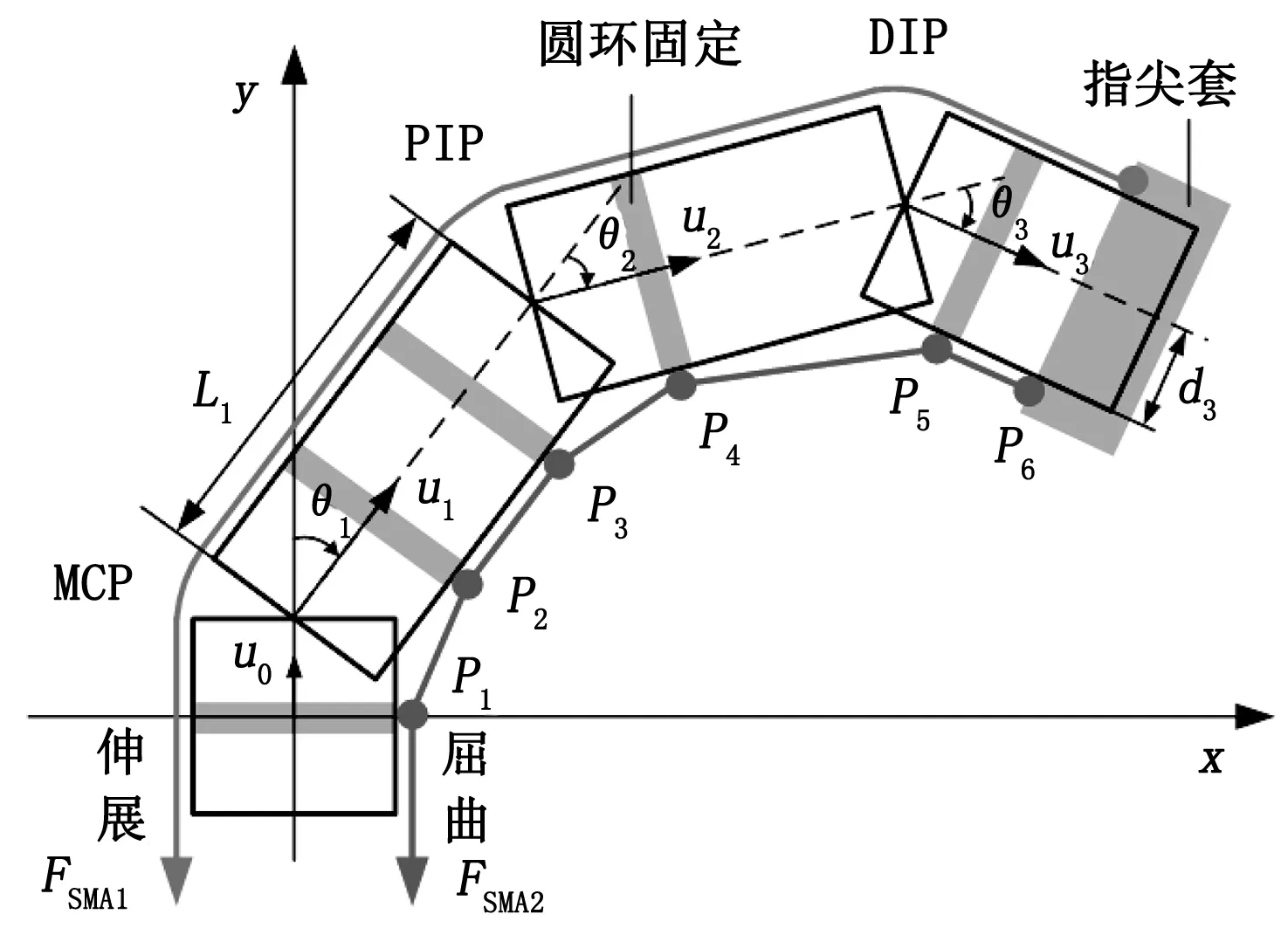
图5 手指康复机器人运动学模型
坐标建立在手指掌骨第一个圆环固定处,y轴为掌骨中轴线方向。图中Li、di和ui(i=0,1,2,3)分别表示掌骨、近端指骨、中节指骨和远端指骨的长度、厚度的一半以及中轴线方向。
ui=Ri-1·ui-1
(1)
式中,R为对应关节之间的旋转变换矩阵。
vi=Li·ui
(2)
根据图5建立运动学模型方程如下:
P1=[d1,0]T
(3)
(4)
(5)
(6)
(7)
(8)
根据上式,输入相应的角度可以计算出,达到需求角度,SMA丝所需要的收缩长度,如下式:(手指运动初始状态默认为三关节角度均为0°时):
(9)
εE=d1θ1+d2θ2+d3θ3
(10)
式中,εF和εE分别表示达到特定角度时,手指掌侧和背侧SMA丝需要收缩的长度。由此可以获得达到手指屈曲最大角度时,所需要的SMA丝收缩量为45.8 mm。根据SMA丝应变低的特点并留有一定的富余,每根手指采用1 m的SMA丝进行驱动。
2.2 手指康复机器人力学模型
在抓取物体时,SMA丝收缩产生的拉动丝线的应力会在物体和指尖之间产生两个方向相互垂直的切向力和法向力,如图6所示。法向力可以克服指尖和物体之间的摩擦,从而实现对物体的抓握。基于虚功原理,利用手指与软体康复手套之间的位移协调与力平衡机制,建立如下方程:
FSMA1·δε1+FSMA2·δε2+Fn·δx+Ft·δx=0
(11)
ε1=-εEj
(12)
ε2=-εFj
(13)
x=(L1sinθ1+L2sin(θ1+θ2)+L3sin(θ1+θ2+θ3))i+
(L1cosθ1+L2cos(θ1+θ2)+L3cos(θ1+θ2+θ3))j
(14)
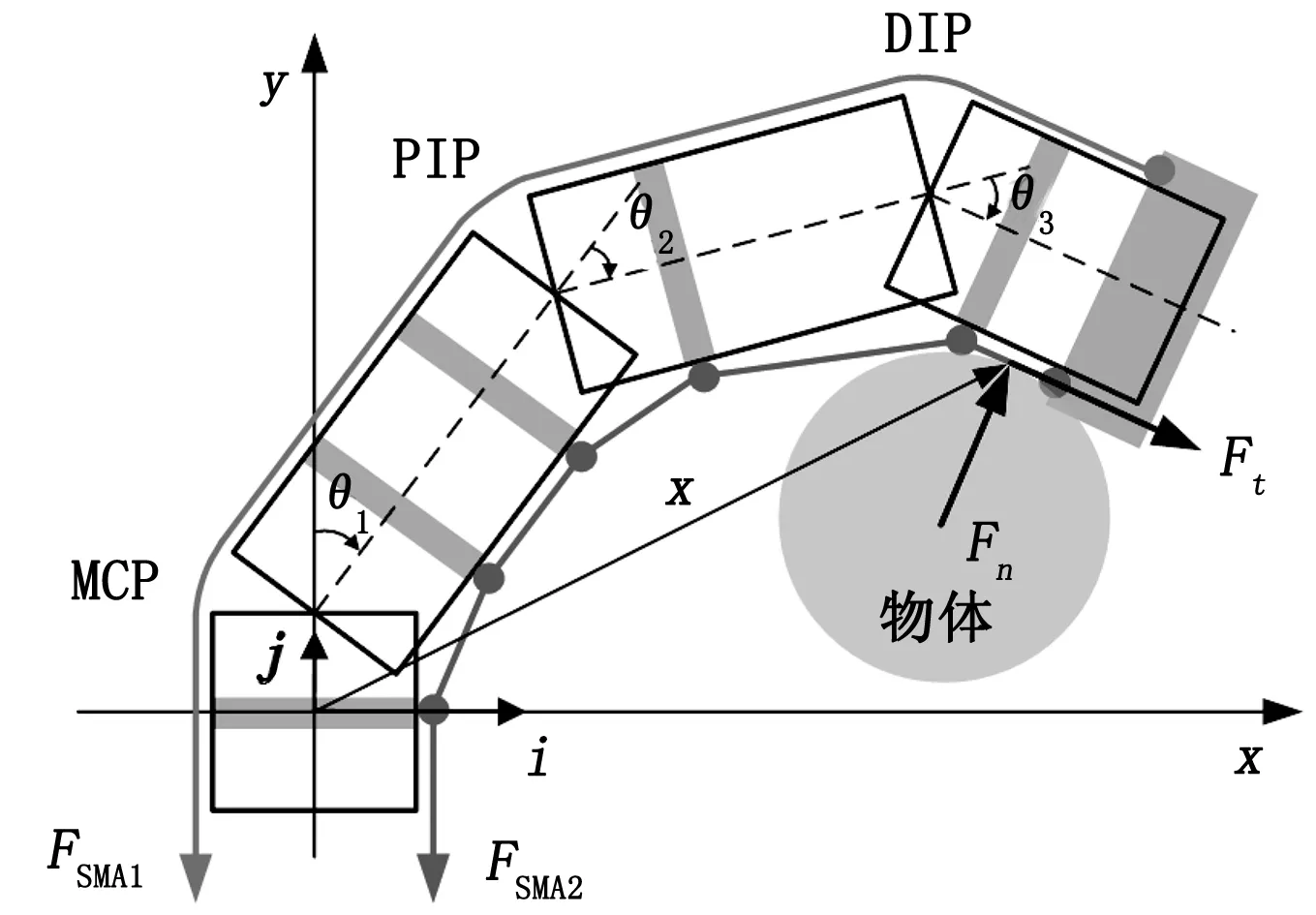
图6 手指康复机器人力学模型
由于手指内部肌肉的协同作用,DIP和PIP的关节角度之间存在一定关系[20],如下式:
(15)
根据上述公式(12)~(15)可以推导出SMA丝收缩产生的力FSMA与Fn之间的关系:
0.30FSMA≤Fn≤0.65FSMA
(16)
3 试验
3.1 手指康复机器人样机
本文选用TiNi基SMA丝作为手指仿生康复机器人的驱动器,直径0.3 mm,电阻率1.11(10-6Ω·m,相变温度为60℃。样机分为基体部分和驱动部分,如图7所示。基体部分总重65 g,驱动部分总重328 g。由于驱动部分直接放置在桌面上,仅基体部分穿戴在手指上,因此样机整体轻便紧凑,不会加重手指的负担,适合成为日常康复的工具。
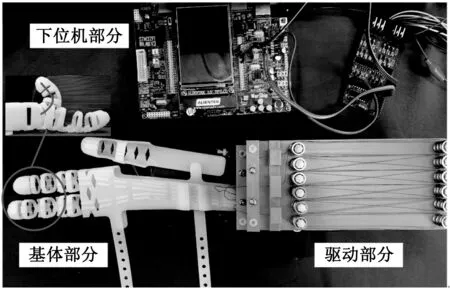
图7 手指康复机器人样机
为了验证本文所设计的手指仿生康复机器人样机的性能,对其运动性能和抓握性能进行试验。受试者在右手上穿戴样机后,将前臂和手放置在前方的桌子上,并被要求完全放松右手。三组SMA丝驱动电压为20 V,通过单根SMA丝的最大电流值为0.8 A。
3.2 运动性能试验
受试者穿戴上手指康复机器人样机之后,在不抓握任何物体的前提下,研究样机的自由运动性能。由样机带动手指从初始状态(三关节角度均为0°)到最大屈曲位置,使用摄像机对每次的试验进行视频录制,每秒测量并记录3个关节的角度值,其位置运动序列如图8所示。
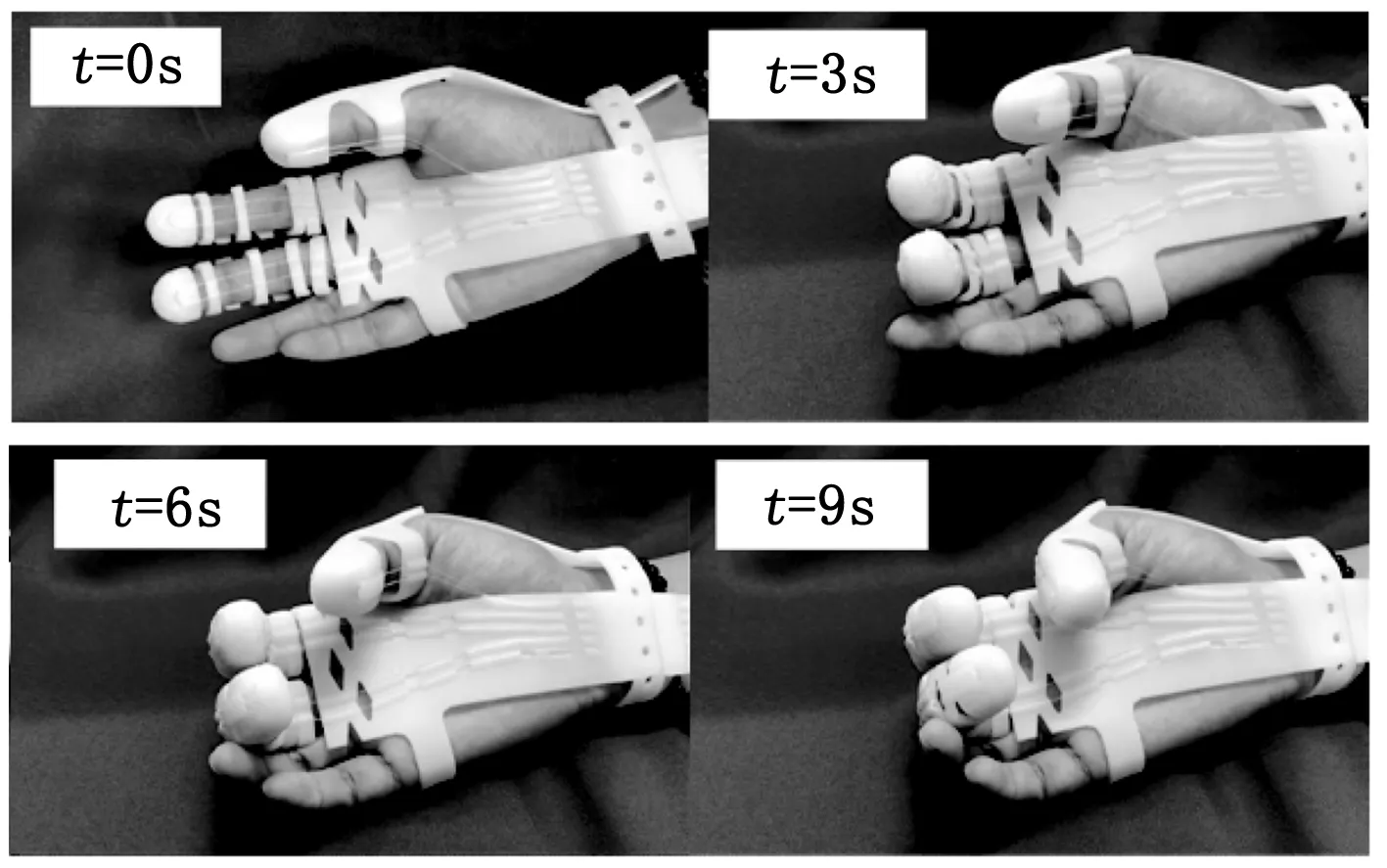
图8 20 V电压下样机屈曲过程图像序列
三指各关节屈曲和伸展的平均最大角度见表2,并与健康人手所能达到的平均最大角度[2]进行比较。
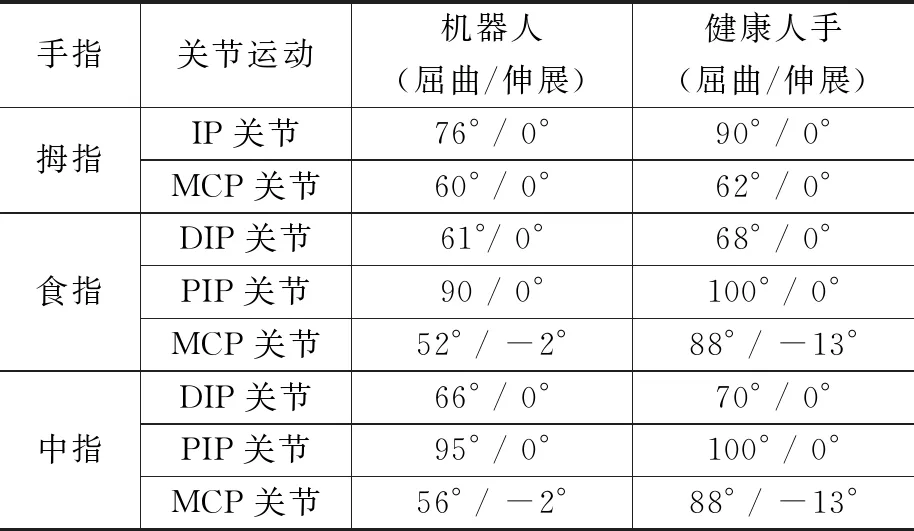
表2 健康人手和康复机器人所达到的平均最大角度
从表2中可以看出康复机器人平均最大角度大概是正常人手的85%。虽然屈曲伸展幅度小于正常人手,但是已经可以满足日常生活中对手指运动范围的需求。表中手指MCP关节的角度都与实际差值最大,是由于结构设计阻挡了一部分MCP关节的行程。因此在后续的研究中,需要改进相应结构的设计,增加MCP关节运动范围。经过试验,康复机器人从初始状态到完全屈曲状态平均时间8 s,从完全屈曲状态到完全伸展状态时间10 s,响应时间较快,可以满足日常要求。
3.3 抓握性能试验
为了测试样机的抓握性能,进行了以下三个方面的试验:指尖力变化试验,抓握力试验以及抓握不同形状物体试验。
3.3.1 指尖力试验
受试者放松手指,将指尖放置在压力传感器上,保持手指初始状态姿势进行试验,如图9所示,分别测试手指康复机器人能提供的最大指尖力。

图9 指尖力试验示意图
压力传感器选用电阻式薄膜压力传感器FSR402,外径18 mm,压力感应范围为0.2~60 N。使用20 V电压驱动SMA丝,记录下拇指、食指和中指在SMA丝的驱动下各自的指尖力变化曲线,如图10所示。
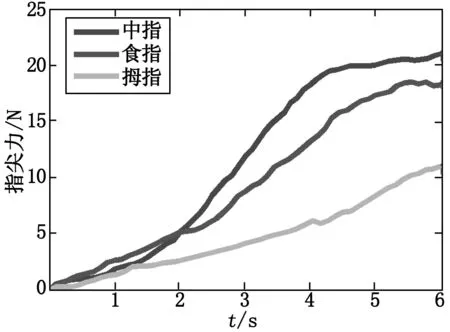
图10 拇指、食指和中指的指尖力变化曲线
从图中可以看出,拇指、食指和中指最大指尖力分别为11 N、18 N和21 N。2011年H.In等人[20]认为18 N的力足以完成日常的抓握任务,因此本文研制的手指仿生康复机器人满足基本的指尖力需求。除此之外,测量了SMA丝在最大指尖力时的拉力分别为24 N、40 N和47 N,约为0.46倍的指尖力,因此满足3.2节中所提出的力学模型。
3.3.2 抓握不同形状物体试验
为了体现本文所研制的手指康复机器人的高适用性和高柔性,因此抓握以下不同形状的物体,测试其抓握性能,如图11所示。
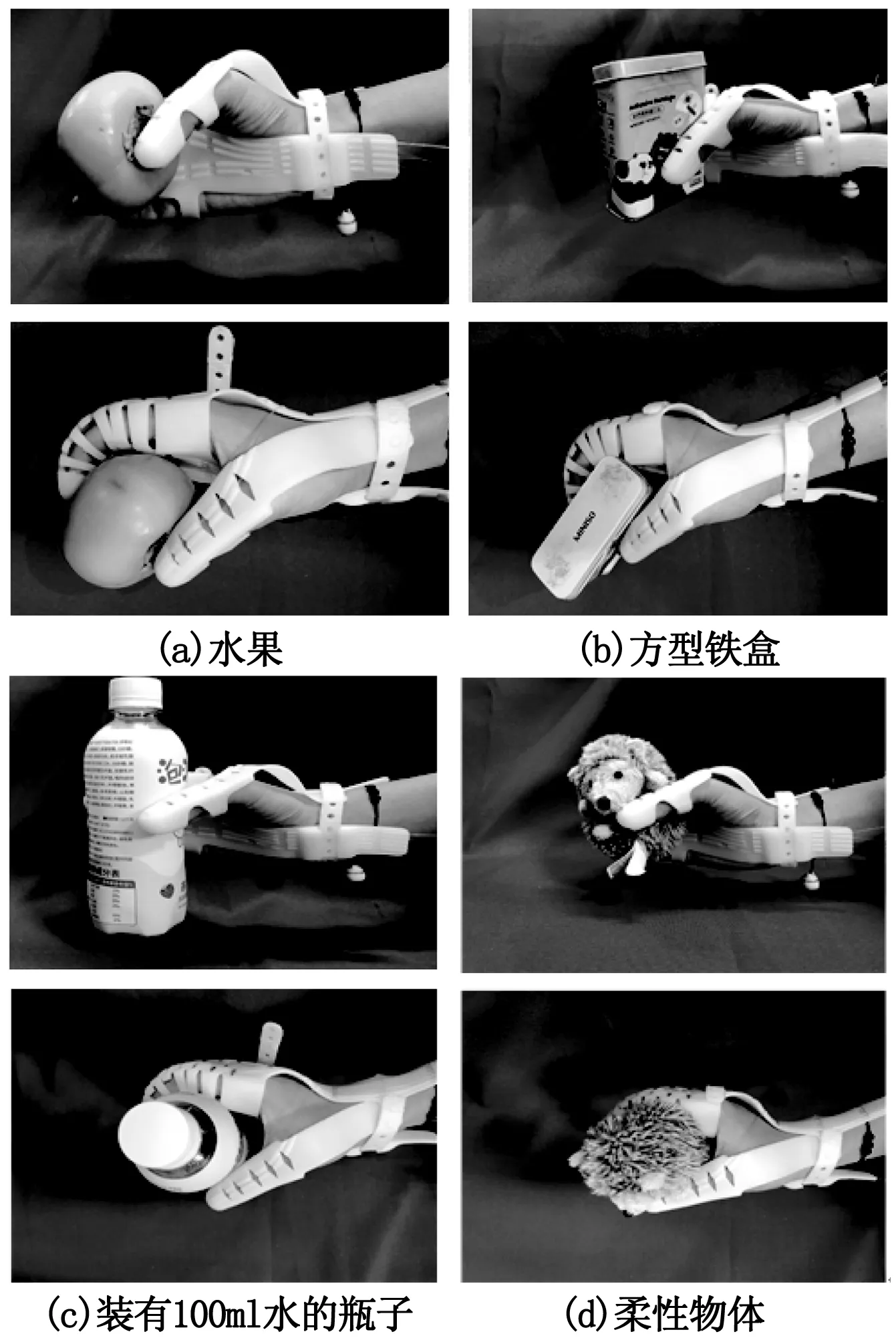
图11 手指康复机器人辅助抓握不同形状物体试验
图11中第一排为抓握物体的主视图,第二排为俯视图。所选择物体质量从10 g到266 g,经试验验证可以看出手指康复机器人能够帮助手指较好地抓握日常用品。
4 结束语
本文在分析手指生物结构和肌肉骨骼致动机理的基础上,研制了一种形状记忆合金丝驱动的柔性结构手指康复机器人,研究其运动学和力学模型。为满足机器人轻便、可携带的特点,在结构上将其做成手套的形式,并使用柔性材料TPU作为手指康复机器人的主体结构,形状记忆合金丝作为驱动器,通过控制SMA丝的收缩来辅助手指实现屈曲伸展等运动功能。通过对手指康复机器人样机运动性能和抓握性能的实验研究,可以看出机器人不仅能够实现正常人手的功能性活动范围,较灵活,还能够增加人手的抓握力,从而减少手指肌肉的压力。其屈曲伸展程度可达正常人手范围的85%,单指最大指尖力为18 N。因此,为未来手指康复机器人的研制提供了一种可行的方案。之后会将传感器加入机器人的控制中,基于电阻反馈来控制SMA丝的精确收缩,从而直观地控制机器人的力和角度。除此之外,手指之间的协同运动康复功能也会在加入未来的控制研究中。
猜你喜欢
临床骨科杂志(2022年3期)2022-11-24
阅读(低年级)(2022年6期)2022-06-17
当代陕西(2022年6期)2022-04-19
宇航总体技术(2021年6期)2021-12-15
电脑爱好者(2021年18期)2021-09-23
舰船科学技术(2021年12期)2021-03-29
房地产导刊(2020年6期)2020-07-25
学生天地(2020年22期)2020-06-09
计算机与网络(2018年4期)2018-09-10
中国计算机报(2018年20期)2018-08-28