枪弹激波实时监测系统的设计与应用
2020-06-29 12:13
计算机测量与控制 2020年6期
(中国人民解放军63936部队,北京 102202)
0 引言
近年来,在阿富汗、叙利亚等全球的敏感地域,各种特种作战样式的战事频发,以西方国家为主导的世界军事强国不断采用先进技术的武器装备,在全球战场上越来越起主导作用,其中侦察与反侦察尤为特出,在轻武器领域如基于激光技术狙击手主动探测技术以及基于声探测技术的狙击手被动探测技术等。其中狙击手声探测系统就是利用声阵列传感器实时探测弹丸在空气中高速飞行时产生的激波,通过数学建模与解算,得到狙击手的隐匿位置,进而给予有力还击[1]。在国外,与其他原理的狙击手探测系统相比,狙击手声探测系统是价格最低廉、测定最精确、使用广泛的狙击手探测系统。
另一方面,在武器装备研制、使用阶段,也还需要测试弹丸的空间射击位置,以确定枪械的射击精度是否满足设计和战术要求,而利用弹丸激波实时探测技术就是一种实用的途径,结合数字信号无线传输技术、虚拟仪器技术等,能够实现高速飞行弹丸的全弹道射击精度、飞行速度等参数的自动测试[2],使系统结构紧凑,仪器布设方便、迅速,降低了使用要求,克服了人为布设仪器带来的随机误差,尤其解决了基于光电技术设计的各种天幕靶、精度靶等测试设备远距离难于防护的问题。更突出的优点还在于增加激波传感器的数量,系统测试精度可以达到校验级,可以用于对天幕精度靶、光幕精度靶等传统光学精度靶的校验。通过试验可知,系统测试精度高,性能稳定,没有误报、漏报现象,具有极大的推广应用价值。
1 枪弹激波实时测量
1.1 枪弹激波特性
根据空气动力学理论,当弹丸以超音速速度在大气中飞行时,便在弹丸的头尾部形成一激波[3]。其波阵面可近似为锥面飞行速度越大,其弹丸尖部激波的角度(锥角)越小,向弹道垂直方向扩散的速度越慢,且扩散的速度受环境温度的影响,温度越高,扩散速度越快。实际拍摄的弹丸在空气中飞行时产生激波的图片如图1所示。
图1 弹丸激波实拍图
在弹道线附近设置激波测量传感器,当弹丸激波扫过传感器时,传感器周围的空气压力会迅速由静态压力变成超压状态,然后又迅速变成负压、由负压回归静态压力状态。由于由传感器探测到的激波波形类似N形状,俗称“N波形”,示意图如图2所示。
图2 N波信号示意图
如果传感器附近有障碍物干扰会造成激波多次反射,这种压力变化可能会间隔重复持续几次。
1.2 激波传感器选型
传感器选型时,除了考虑传感器的尺寸、形状、安装方式、输出类型外,主要考虑传感器的灵敏度、固有频率、量程、过载能力、指向性等,这些性能指标将直接决定是否能准确、及时地测量激波信号。
激波在空气中的能量随传输距离呈指数规律衰减,且激波的频率越高,能量衰减越快,激波的传播距离也就越短。由于不同的武器种类,其弹丸产生的激波频谱特性差别很大,且当测点距离不同的时候,频谱也会产生变异。根据目前国内外轻武器试验需求,弹丸激波的压力峰值一般为MPa量级,综合考虑信号的后级处理能力,传感器的灵敏度大于0.1 mV/Pa即可。
对于传感器固有频率,当测试弹速大于450 m/s的弹丸时,其N波正负峰宽度(持续时间)约为120 μs,为保证获取的N波前沿的陡峭,因此传感器的最佳固有频率不小于500 kHz。当后续信号调理电路一致性很好,做到每个传感器输出信号一致性很好时,传感器的固有频率可以低至100 kHz。
对于传感器量程,考虑到近距离测试弹丸激波的可能性,以及大口径枪弹激波的压力峰值,取传感器量程为10 MPa,且其动态过载能力不小于10 MPa。
对于传感器指向性,在实际测试中,弹丸是来自不同的方向的。为了满足测试要求,传感器应具有全向性,尽可能使不同方向的弹丸激波信号幅度处于同一个量级。
根据以上传感器的灵敏度、固有频率、量程、过载能力、指向性等性能指标需求,M132系列微型压力传感器比较适合用于激波信号的测试。
1.3 激波传感器输出信号调理
传感器信号调理必须实现其输出幅度满足后续处理要求,同时其带宽、信噪比也必须满足要求;多通道测试时,还必须保证通道一致性。由于激波测试传感器输出信号微弱,其输出需要经过多级放大才能满足后级信号处理要求,其输出信号调理主要包括电荷放大器、一级放大、二级放大、带通滤波等。为了适应不同灵敏度的传感器以及用于不同距离的测量,二级放大器的输出还反馈控制一级放大的增益,使得最终信号调理的输出电平总是在5 V左右,以便于后级信号的处理,其原理如图3所示。

图3 传感器输出信号调理原理框图
1.3.1 电荷放大器设计
由于选用的激波传感器为电荷输出,为便于后级信号放大调理,首先须将电荷输出转变为电压输出,即电荷电压转换(俗称电荷放大器)。综合考虑全系统采用正电源供电,因此选用运放AD743以及设计电压偏置电路,其电路原理如图4所示。

图4 电荷放大器电路原理图

为避免高低温对运放器件造成温漂影响,实际电路设计时,利用同型号运放另设计一路放大电路,不同环境温度时其输出结果和常温时相比较,用其差值控制电荷放大器的增益,从而消除环境温度的影响。
1.3.2 信号放大
信号放大包括一级放大和二级放大。核心器件采用精密仪器用运算放大器 INA114,INA114价格低廉、精度高,使用简单,只需一个外部电阻就可以设置1~10 000之间的任意增益值。
经过一级放大后,激波信号的幅值依然相对较小,需要对信号进行二级放大。为保证多通道测试时,由于传感器的灵敏度不一致而造成信号调理输出幅度差异很大,在二级放大中增加了信号负反馈,实现放大器增益归一化控制。
1.3.3 带通滤波器设计
测试时,除了高速飞行弹丸产生的激波,还有射击时火药的爆炸声和周围环境的杂散的声音,这些声信号也会作用于激波传感器,随同激波信号同比例被放大,从而大大降低输出信号的信噪比。考虑到弹丸激波信号的主频分布在5~50 kHz区间,因此在二级放大输出电路中加入带通滤波器[4],可以有效降低噪声的干扰。
进行带通滤波器设计时,采取二阶低通和二阶高通滤波电路串联的方式,两者既可以设计成跟随器,也可设计成具有放大的功能滤波器,不过放大倍数不宜过大,以免影响滤波器的带宽。
带通滤波器的核心器件运放采用高精度单片运算放大器 OP37。OP37是一种高精度、超低噪声和高速相结合的仪表级单片运算放大器,具备工业标准直流特性,具有很低的输入失调电压和漂移,其输入失调电压典型值为10 μV。OP37的优良特性使它特别适合用作滤波器,而不用考虑调零和频率问题就能满足要求。
1.3.4 枪弹激波波形实时测量
枪弹激波波形实时测量电路设计调试完成后,进行了实弹射击测试。试验时,在空旷区域,使用7.62 mm口径的某型武器,测点距离枪口10 m,距地面高1.5 m,距弹道线1 m,弹速约700 m/s时,其实测波形如图5所示。
图5 枪弹激波实时测量波形图
由图5可见,信号调理输出N波信号正、负峰脉冲持续时间约120 μs,与理论分析计算结果相符;输出信号信噪比较高,信号幅度达2.5 V,可以进行后续的时间间隔测量分析;但由于滤波器带宽以及截止频率参数设计等因素,N波的正、负峰并不对称,以及出现明显的拖尾现象,考虑到后级处理只在时域分析N波的正峰的上升特性以及到达峰值的时刻,因此满足设计要求。
当取消带通滤波器时,二级放大输出的实测波形更接近图2所示的N波形。因此,可以根据后续信号处理的要求进一步优化设计确定带通滤波器的具体参数。
2 枪弹激波实时监测技术应用
2.1 枪弹激波实时监测系统原理
枪弹激波最广泛的应用,一是在战场上探测狙击手位置,二是在试验靶场探测弹着点坐标,归根结底都是声源定位[5]。目前现有的声源目标定位技术基本上可以分为3类[6]:基于最大输出功率的可控波束形成技术、高分辨率谱估计技术和基于声达时间差的定位技术。鉴于枪弹激波持续时间短,所以选用基于声达时间差的定位技术[7]。
传感器阵列形式有均匀直线式、平面阵、立体阵等,不同的阵列模型适用于不同的测试范围:三维空间定位一般需要采用立体阵,而二维平面定位一般采用平面阵,具体哪个效果更佳,还需要看定位靶面的大小。为简化设计以及测试结果可验证,设计采用四角平面方阵结构[7],4个传感器分别位于正方形的4个顶角,如图6所示。

图6 激波传感器阵列示意图
如图6所示,以正方形中心为原点、对角线分别为x轴和y轴建立直角坐标系,T1、T2、T3、T4分别为4个传感器,距坐标原点均为L,则T1、T2、T3、T4坐标分别为(-L,0)、(0,-L)、(L,0)、(0,L),P为命中靶面的弹着点,坐标为(x,y),并设P至T1距离为R1,P至T2距离与P至T1距离的差为r2,P至T3距离与P至T1距离的差为r3,P至T4距离与P至T1距离的差为r4,则有[8]:
(1)
x2+(y+L)2=(R1+r2)2
(2)
(x-L)2+y2=(R1+r3)2
(3)
x2+(y-L)2=(R1+r4)2
(4)
解式(1)~(4),得:
(5)
(6)
(7)
设激波传播速度为C,ti为激波从P至Ti时间与从P传至T1时间的差,则ri为C与ti的积,ti可通过基于CPLD芯片的脉冲时间间隔电路[9-10]测得,由此可求得x,y的值。
实际情况下,安装激波传感器阵列时,人们习惯将正方形的一条边和地面平行。为此,可将由图6所述的传感器阵列逆时针旋转45°,而坐标系不变,x、y坐标表达式(5)、(6)还需进行新的坐标系变换。
图6中,正方形对角线上传感器间距的大小以及精度都会影响弹着点坐标的测试精度,必须合理设计和安装传感器。当需要更高的测试精度时,可以增加传感器的数量,建立多组传感器阵列,求取多组阵列计算结果的平均值即可。
2.2 枪弹激波实时监测系统设计
枪弹激波实时监测系统结构包括激波传感器阵列和信号分析处理两部分。传感器阵列除了传感器以及信号调理部分外,还集成有脉冲间隔时间测量电路、数字信号无线传输电路。信号分析处理是一台安装有上位机应用软件的手持单板计算机或笔记本计算机。两者通过WIFI进行无线信号传输。当传输距离较远时,也可以运用无线数传技术实现信号无线传输,其原理结构如图7所示。

图7 枪弹激波实时监测系统原理结构图
激波传感器阵列如图6所示,4个激波传感器位于垂直平面内,且每个传感器分别置于正方形的4个顶角;激波传感器间距为500 mm;传感器敏感端面均朝向弹道线;在传感器靠近枪口侧距传感器50 mm处垂直设置对比纸靶,信号调理电路及信号无线传输电路置于传感器阵列的下沿。
为准确测得激波信号达到每个传感器的时刻,在传感器阵列前方(枪口侧)设置一个传感器,当激波信号略过该传感器时输出一个脉冲信号作为传感器阵列的4个传感器时间间隔测量的启动信号,阵列传感器的输出信号作为时间间隔测量的停止信号。
根据启动传感器与激波传感器阵列的距离,以及该系统适应的枪弹速度范围,设计确定时间间隔测量的长度。当距离为1 m、弹速区间为500~1 200 m/s时,激波传播时间最大约为2 ms。实际设计时,时钟频率为10 MHz,二进制计数器长度为16位。
时间间隔测量模块核心芯片为EPM1270,同时集成8通道,便于传感器阵列扩展;除了8通道16位二进制计数器外,还设计有输入信号整形模块、有抗干扰模块、逻辑控制模块、总线输出模块等。
系统控制电路核心芯片采用STC15W4K60S4单片机,该系列单片机运行速度快,程序存储空间及运行内存大,有硬件看门狗功能,外围器件少,编程调试方便,成本低。一个串口用于下载程序,一个串口用于与上位机通信。为了计算激波扩散速度,单片机还通过温度测量模块测试环境的温度。单片机软件由Keil C编程实现。
数据传输采用无线传输方式。近距离通信时,由WIFI模块实现,以便于组网测试;远距离通信时,由基于RS232接口的无线数传模块实现,最远距离不小于1 000 m,满足轻武器试验的需求。
上位机应用软件由LabWindows/CVI软件编程工具编程实现,功能主要有:数据无线通信控制、弹着点坐标计算、结果分析统计、输出及输入控制等。数据无线传输还具有误码检查、重传,以及信道通信质量检测功能。弹着点坐标计算通过调用动态链接库的方式实现,便于今后扩展升级。
2.3 实验结果与分析
系统建立后,使用5.8 mm口径自动步枪,进行了实弹射击试验,射距100 m,每组射击10发,测试结果如表1所示。表1中,x(纸)、y(纸)分别表示实际量得的纸靶的弹着点水平和高低方向的坐标,x(电)、y(电)分别表示由枪弹激波实时监测系统测得的弹着点水平和高低方向的坐标。
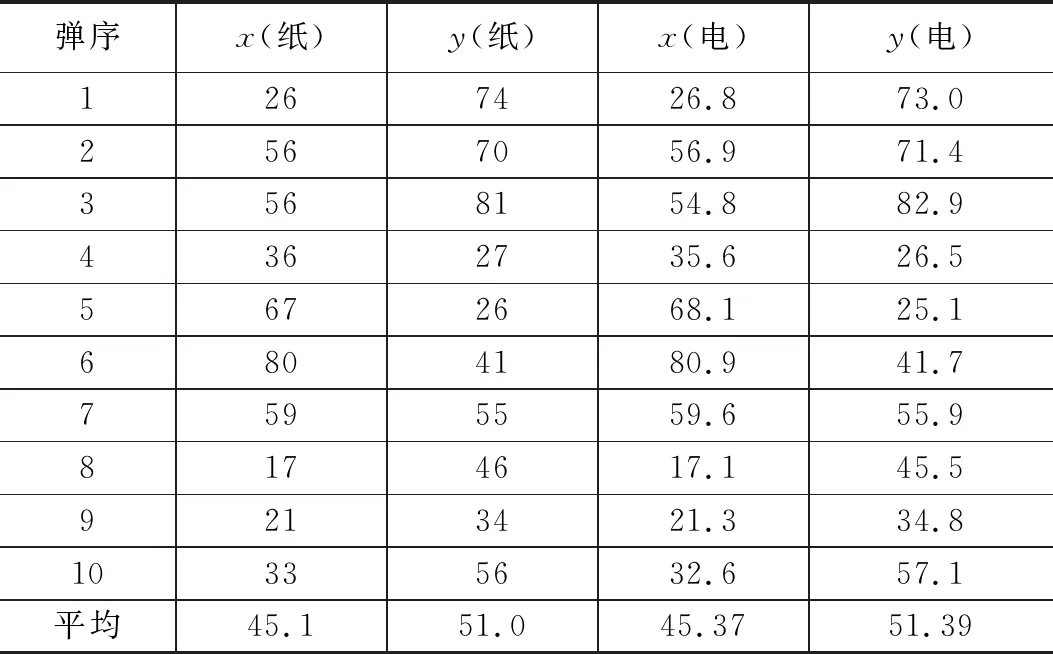
表1 定位精度对比表 mm
由表1可见,水平方向(x轴)仪器测试与纸靶对比最小误差为0.1 mm,最大误差为1.2 mm,组平均误差为0.27 mm;高低方向(y轴)仪器测试与纸靶对比最小误差为0.5 mm,最大误差为1.9 mm,组平均误差为0.39 mm。按照传感器的阵列模型以及数学模型分析可知,高低方向坐标的测试精度应该和水平方向的测试精度相同,而实际测试结果表明,高低方向的测试误差大于水平方向的测试误差,经过查找分析原因,系在传感器阵列布设时,水平方向利用水平仪调校确保了水平方向的精度,但是垂直方向没有采用专业仪器或手段确保靶面与地平面垂直,即弹道线没有与传感器阵列面的法线平行,由此引入了测试误差。
综上所述,采用激波测试方法所得结果与实际位置接近,定位精度满足使用要求[11]。但是由于传感器的探测角度限制,远离坐标原点的误差较大,且越接近传感器探测角度边界,误差越大。当需要定位精度更高时,可以考虑增加传感器的数量来提高测试精度。
3 结束语
本文介绍的枪弹激波实时监测技术已经成功应用于多套基于声测试技术的常规武器性能测试仪器的设计,增加了试验手段,明显提高了参数测试精度和试验效率。但是,由于在多路时差估计时采用了基于时域的脉冲时间间隔测试方法,限制了激波测试的路数。今后,可以进一步优化滤波器性能设计,准确测量“N波形”,扩展激波测试的路数,利用频域时差估计技术准确获取时差,进一步拓展激波实时测量的应用领域。
猜你喜欢
兵器装备工程学报(2022年10期)2022-11-01
航空学报(2022年9期)2022-10-14
弹箭与制导学报(2022年1期)2022-04-01
内燃机学报(2022年2期)2022-03-23
弹道学报(2021年4期)2021-12-24
火炮发射与控制学报(2021年3期)2021-09-23
航空学报(2021年3期)2021-03-27
航空发动机(2020年3期)2020-07-24
轻兵器(2020年2期)2020-02-25
轻兵器(2017年19期)2017-10-23