一种巡检无人机能量转换及管理系统
2020-06-28 09:38张东明袁钟达王大为
中国新技术新产品 2020年8期
张东明 袁钟达 任 哲 袁 杰 王大为
(1.陕西省天然气股份有限公司,陕西 西安 710016;2.西安爱生无人机技术有限公司,陕西 西安 710065)
0 引言
目前小型无人机技术发展迅猛,无人机用于线路巡检以替代人工巡检正逐渐成为现实。在巡检无人机领域,使用垂直起降无人机搭载任务设备进行巡检是一种常用方法。通常巡检无人机的巡查范围较大,因此要求其飞行时间长,起降时间短。目前市场上巡检无人机搭载的电子设备的能量全部来源于电池,所以飞行时间受制于电池电量。旋翼与任务设备是主要的耗电部分,旋翼因为耗电大,所以需要单独的旋翼电池,其充电和安装都需要额外的时间。而任务设备的供电一般是起飞前就全部供电,并不能按需分配,这样就会造成部分能量浪费。
1 能量来源与能量密度
1.1 巡检无人机能量常用来源
电池是无人机的能源之一。由于电池技术的进步,今天的无人机才能够得到飞速发展,但电池所具有的能量密度仍不如燃油,以电池为能量来源的无人机飞行时间短,并且任务设备的电源供电通常是在起飞前就通电,并保持全航程运行,但是一般巡检无人机的任务设备是图像和照片的传输设备,在飞机飞到目标航点之前并不需要开启,因此,以电池为主要能源的无人机会造成一定的能源浪费[1,5]。而燃油也可以作为无人机能量来源,而且不存在以上问题。
1.2 通用能源的能量密度
采用纳米硅碳负极、富锂正极的24 A·h 的锂离子电池单体,质量能量密度可达到374 W·h/kg,体积能量密度达到577 W·h/L。8 A·h 固态聚合物锂电池60 ℃下,能量密度可达到240 W·h/kg,基于无机陶瓷固态电解质的固态锂电池室温下,能量密度达到240 W·h/kg。37 A·h的锂硫电池单体室温下,能量密度达到566 W·h/kg,50℃下达到616 W·h/kg。5 A·h 锂空气电池单体能量密度达到526 W·h/kg。
汽油能量密度大约是12 MJ/kg~17 MJ/kg,而汽油机的效率通常在30%~70%,所以同重量的汽油具有的可用能量比电池多,油电混合能量将大于电池能量,纯电池无人机基本只有30 min 的续航时间,难以满足巡检要求。油电混合无人机续航时间长,工作效率高,尤其在巡检应用领域,优势明显。
2 巡检无人机能量转换
2.1 巡检无人机能量转换及管理整体设计
该方案巡检无人机能量转换及管理系统整体框图如图1所示。系统主要包括发电机、能量转换电路和外部接口电路[2]。
飞行过程中发动机带动发电机工作,发电机将燃油化学能转化为电能,同时发动机输出一路转速信号至能量转换电路,用来监测发动机及发电机的工作情况。能量转换电路通过内部的充电部分将发电机的电充至机载电池和旋翼电池[3]。外部接口与数据链相连,将数据转换成通用接口(即能量转换电路可用的RS-232 和CAN2.0 接口)。能量转换电路一方面将能量转换电路的运行状态和检测值传回,一方面根据指令控制开关设备1 和设备2 的供电开关。整体方案如图1 所示。

图1 无人机搭载设备温度控制装置整体方案设计
发电机采用小型发电机。能量转化电路以STM32F103 处理器为核心,以MOS 管作为设备1 和设备2 的供电开关。电源整型滤波部分将发电机电源整型至28 V,采用两路充电电路分别为机载电池和旋翼电池充电,使用CAN 和RS-232 接口与外部进行通信。
2.2 能量转换电路
能量转换电路组成如图2 所示,控制电路包括整流滤波部分,用以将发电机的输出转换至直流稳定的电压。2个MOS开关分别控制设备1 供电开关和设备2 供电开关。DC-DC 电源转换电路包括多级电源转换电路,用以产生适合各个芯片正常工作的电压、适合充电电路和MOS 开关的电压。电流采样电路部分用来采集流过机载电池的电流,将其转换成电压,传送给处理器。电压采样电路部分用来采集机载电池电压,转换到合适的电压范围内,传送给处理器。RS-232 接口转换部分将接口转换成RS-232 标准,连接至外部接口,用来与外部通信。CAN 接口转换部分将接口转换成RS-232 标准,连接至外部接口,用来与外部通信。充电电路1 由充电芯片构成,用于给机载电池充电。充电电路2 由集成充电模块构成,用于给旋翼电池供电。处理器采用STM32F103,根据外部指令控制MOS 开关,进而控制设备1 和设备2 工作。处理器根据检测到的发动机工作状态控制充电电路工作,处理器将电流采样值、电压采样值及运行状态通过外部接口发送出去[4]。
巡检无人机能量转换及组成如图1 所示。各部分通过线缆相连。
能量转换电路组成如图2 所示,包括2 个MOS 开关、整流滤波部分、DC-DC 电源转换部分、处理器部分、充电电路1 部分、充电电路2 部分、接口转换部分、电流采样部分和电压采样部分。
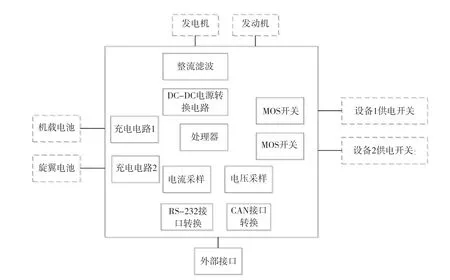
图2 能量转换电路组成图
整流滤波部分由4 个二极管、稳压管和部分大电容构成。整流滤波部分输入端连接发电机,输出端连接DC-DC电源转换电路。
DC-DC 电源转换部分采用多级电路转换构成,共输出3 种电压,即28 V、3.3 V 和5 V 。28 V 连接至2 个MOS 开关,控制充电电路1 和充电电路2。3.3 V 连接至处理器,电压采样。5 V 电压连接至电流采样部分。还包括RS-232接口转换电路和CAN 接口转换电路。
2 个MOS 开关均以BSS138 和FDS6675 组合组成,共有输入、输出和使能端3 个端口。输入端连接至DC-DC 电源转换电路的28 V 输出端,输出端连接至外部设备,使能端连接至处理器。
充电电路1 采用BQ24650 电路对24 V 的机载电池充电,充电电路2 采用集成模块对42 V 旋翼电池充电。电流采样电路采用ACS722LLCTR 芯片将电流转换成电压,连接至处理器的ADC 部分。电压采样电路采用电阻分压连接至以OPA365 组成的电压跟随电路,再连接至处理器的ADC部分。
RS-232 接口转换电路连接至处理器的UART 接口,将数据转换成RS-232 协议与外部通信。CAN 转换电路连接至处理器的CAN 接口,将数据转换成CAN2.0 协议与外部通信。
2.3 程序处理流程
处理器程序采用C 语言编写,利用芯片STM32F1 的串口和CAN 接口进行数据的接收与发送。程序流程如图3 所示。接收数据后解析数据,判断是否开启任务设备1,如果开启,则将任务1 的I/O 接口电平拉高,如果不开启,则将任务1 的I/O 接口电平拉低。判断是否开启任务设备2,如果开启,则将任务2 的I/O 接口电平拉高,如果不开启,则将任务2 的I/O 接口电平拉低,通过I/O 接口控制外部连接任务设备的开关,这样就可以根据需求实时开启任务设备,避免了任务设备长时间开启的情况,既增加了灵活性又节省了能源。读取发动机转速,如果达到预定值,则使燃料化学能转化成电能对电路充电,增加预定值可以确保充电电路的输入状态稳定,防止发电机突然变化损坏电路。这样在飞行过程中对电池充电,可以增加航时。读取电流电压值并将其发送到数据链,这样地面端可以实时监测能量转化状态。
3 结语
该文针对巡检无人机电子设备的能量来源,由电池更改为电池和燃油混合,可延长飞行时间,缩短起降时间。该发明利用硬件电路实现多路电源按需供给,增强了能量分配的灵活性[6]。通过程序可以控制任务设备的供电开关,并可向外传输流过机载电池的电流值和机载电池电压值。能源利用率高,具有较高的实用价值,在巡检无人机领域优势明显。

图3 程序处理流程图
猜你喜欢
阅读(快乐英语高年级)(2019年2期)2019-09-10
大电机技术(2017年3期)2017-06-05
军事文摘(2016年16期)2016-09-13
消费者报道(2016年3期)2016-02-28
风能(2016年12期)2016-02-25
智能建筑电气技术(2015年5期)2015-12-10
电子设计工程(2015年12期)2015-02-27
汽车零部件(2014年1期)2014-09-21
电力工程技术(2014年1期)2014-03-20
环球时报(2009-12-25)2009-12-25