人工智能飞行通信员系统方案设计
2020-06-27 04:35:48雷国志代红
航空工程进展 2020年3期
雷国志,代红
(1.西南电子技术研究所 航空部, 成都 610036)(2.陆军航空军代局驻成都地区军代室, 成都 610036)
0 引 言
随着神经网络、深度学习等技术的突破,利用人工智能技术降低操作者负荷,提高系统安全性已成为民航发展的方向。国内外围绕人工智能在机器人替代副驾驶、替代空管等方面进行了大量的研究工作。例如,Aurora公司研发了ALIAS机器人并进行飞行测试[1];杨红雨等[2]研究利用人工智能代替空管人员的方法。但上述研究却未涉及关于人工智能替代飞行通信员方面的研究。
虽然随着电子信息技术的发展,新的航电设备的出现,专职飞行通讯员岗位已经消失,但其陆空通信的职责仍然存在,并由飞行驾驶员承担。张璐[3]通过统计历年来民航所发生的不安全事件,总结发生在通话过程中的不安全事件要高于其他技术原因,而目前空管领域采用人工“对关键指令进行抄收和复诵”[4]的方法,该方法耗时长且效率低。
本文用人工智能技术替代飞行通信员(或飞行驾驶员的通信职责),从飞行员操作过程、系统内外部接口、系统的功能架构、机载电子系统的可实现性等角度进行综合设计,针对系统的安全性和通信效率进行充分地分析评估。
1 方案设计
1.1 过程设计
陆空通话过程包括5个子过程:话音接收、语义理解、指令执行、指令复诵和话音发射,其中语义理解和指令复诵是单纯的人类活动,而话音接收、指令执行和话音发射则是人机在环行为。人工智能飞行通信员系统(ACPS)代替飞行通信员(或飞行驾驶员的通信职责)的通话过程如图1所示[5],通话过程为:
(1) 话音接收不变,将原先送给机组成员的接收音频同步发送给ACPS。
(2) 语义理解过程在原先的听觉认知基础上增加了视觉认知,通过视觉、听觉跨模态交互促进机组认知。
(3) 当视觉听觉认知一致既语义理解无误时,ACPS自动执行指令,并自动进行指令复诵;当视听认知不一致既语义理解不清时,不执行指令,机组成员完成复诵,因此原先的指令执行和指令复诵过程合并为一个过程。
(4) 话音发射过程增加ACPS音频发送和机组音频发送的切换。
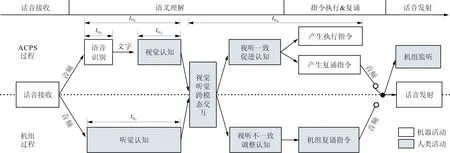
图1 人工智能飞行通信员系统(ACPS)陆空通话过程
1.2 接口设计
ACPS过程中有许多机器活动,ACPS需要操控机载航电系统完成带飞、天气解读、飞行计划和航行通告等陆空通话活动,而飞行通信员的这些操作都可以包含在机载通信导航监视(Communication Navigation System,简称CNS)系统中。现代飞机CNS系统基本作为一个整体进行设计的,ACPS可以通过统一的总线实现CNS系统的互操作。ARINC660A推荐的CNS系统架构与ACPS的交联关系如图2所示[6],具体包括:
(1) 机组控制:耳机、话筒、音频、发话使能(PTT)等;
(2) 导航接收机:导航数据、自动调谐指令;
(3) 传感器:高度、空速、航姿等;
(4) 通信电台:自动调谐指令;
(5) 飞行显示器:飞机位置、航图、数据链信息等;
(6) 飞行控制:飞行计划、自动调谐指令等;
(7) 监视设备:应答机、高度表、雷达。
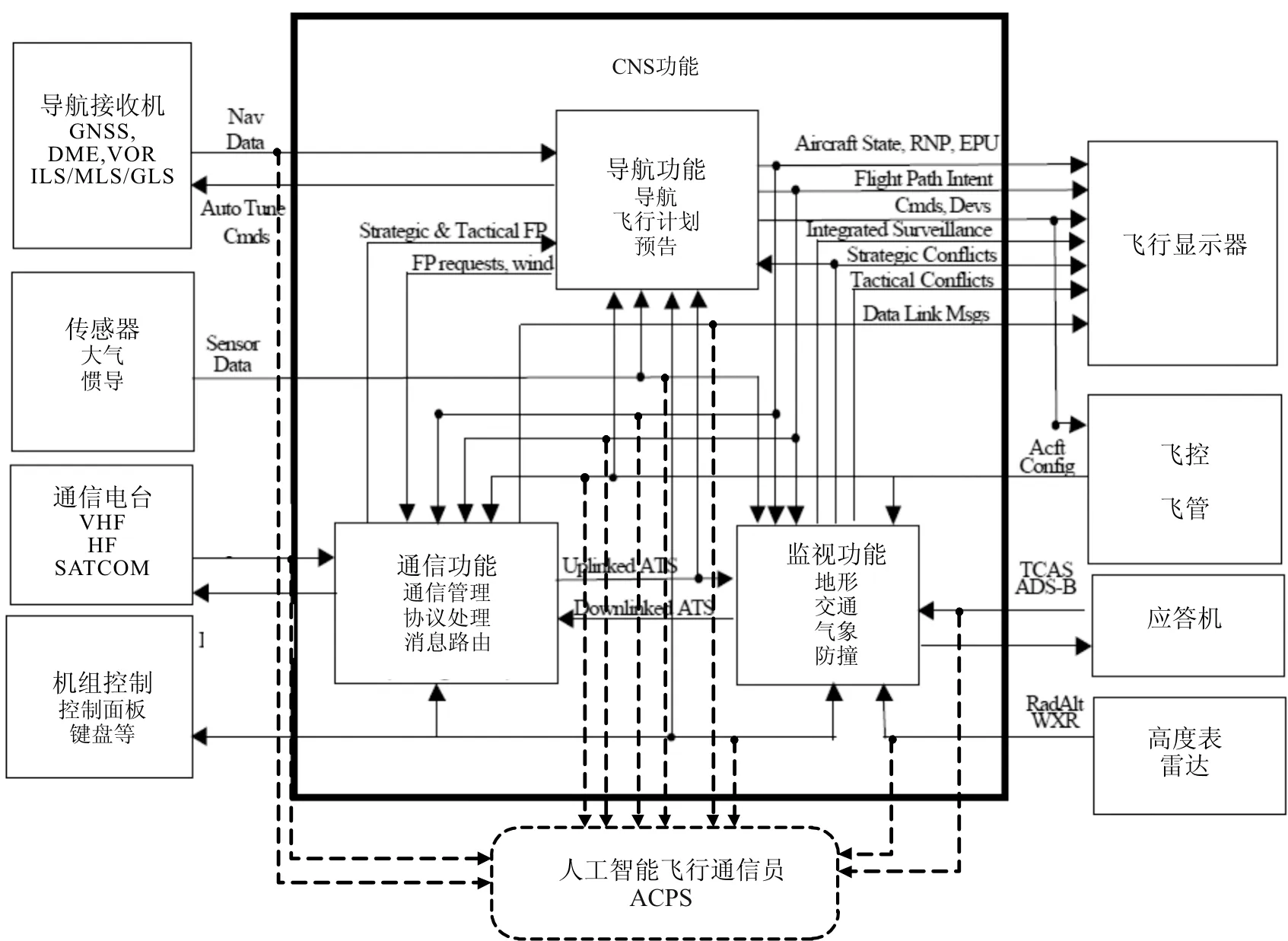
图2 CNS系统与ACPS交联图
1.3 架构设计
不同的CNS系统架构可以有不同的ACPS设计方案[7],采用综合模块化航空电子(IMA)架构的CNS系统理论可以采用“纯软件”的方式予以实现,但由于现行的IMA计算机并没有考虑深度学习等人工智能计算需求。因此本文在典型CNS系统架构上,通过增加ACPS主机的方式,给出ACPS的系统架构如图3所示。
该架构以语音识别和指令生成两个深度信念网络(Deep Belief Network,简称DBN)为核心构建,语音识别功能将来自CNS系统的音频输入进行降噪处理后提取特征参数,通过DBN后生成语义序列;其后的指令生成功能将语义序列与来自机载总线的飞行计划、飞行参数、航行位置、航图等数据进行联合并提取特征参数,通过第二个DBN生成执行指令和复诵指令,其中执行指令通过机载总线发送给CNS系统,复诵指令在通过韵律处理后读取语音库生成复诵话音,最后输出到CNS系统。

图3 ACPS原理架构
由于机载航电系统对实时性要求很高,为提高效率,ACPS在离线的情况下对两个DBN进行训练学习[8],训练好的声学、语言模型和指令模型加载到机载环境中进行快速计算。
1.4 硬件设计
ACPS计算机作为机载嵌入式平台,应同时满足数据实时性和可计算性能的需求。相对于单个服务器CPU而言嵌入式计算机性能普遍较弱,ACPS计算机系统采用分布式异构架构,主控模块采用事务型处理器,DBN计算模块采用多片计算型CPU并行计算,并通过Rapid IO直接与主控模块互联,接口模块采用IO型处理器,多种CPU构成了ACPS的计算系统,其硬件架构如图4所示,主要模块功能如下:
(1) 主控模块完成ACPS功能,系统内的维护等;
(2) 接口模块将总线、模拟、离散接口数据和状态发给主控模块,并将主控模块的指令通过总线、模拟、离散接口发送给其他系统;
(3) 神经网络计算模块实现语音识别、自动指令控制等功能所需的DBN计算;
(4) 大容量存储器用于保存数据模型、新的神经网络数据、ACPS工作参数等。

图4 ACPS硬件架构
1.5 飞行员操作程序设计
相对于原先飞行通信员完全依靠听觉认知的操作过程,ACPS增加了视觉认知过程和听视觉交互过程,这需要新的飞行员操作程序(Pilot Operational Procedures,简称POP)支撑。针对飞机离港和新管制频率确认两个空管过程设计了空管指令确认界面和调谐指令生成界面,分别如图5~图6所示。

图5 空管指令确认界面

图6 调谐指令生成界面
对于空管指令确认界面,ACPS将空管发送的语音指令转化成文字显示在屏幕上,同时自动生成所需复诵文字,当机组确实视觉指令与听觉指令一致后按压确认键(或PTT)即可执行后续操作。
对于调谐指令生成界面,ACPS将空管发送的飞行计划转化自动调谐指令,当机组确认后录入飞行管理系统,更新飞行计划。
2 性能分析
2.1 安全性分析
航电系统是安全性相关的系统,从图2可以看出ACPS和机组的陆空通话操作在机载设备操作需求方面是完全独立的,同时ACPS硬件和软件是独立开发的,ACPS与原机载设备没有直接耦合,是通过机组人员完成,满足ARP4754A的独立性要求。当ACPS的研制保证等级与原机载设备的研制保证等级一致,根据ARP4754A,具备ACPS的通话功能丧失的失效状态分类可以提升一个等级;如果ACPS的研制保证等级低于原机载设备一个等级,新的通话功能丧失的失效分类与原通话安全性等级一致。
因此ACPS不会导致陆空通话安全性下降,同时解决了语言、口音、注意力问题,也提升了系统安全性[9-10],保证飞行安全[11]。
2.2 通信性能分析
DO284中95%RCP通信时间的过程分析如图7所示[12],其中人因性能包括地面管制员和飞行通信员两部分,机器性能主要由通信设备提供,ACPS主要改善的飞行通信员的人员绩效的反应时间(人因性能),因此本文采用ACPS后的反应时间。

图7 95%RCP通信时间
一般听觉认知短时记忆为tH1=3~5 s,而视觉认知短时记忆一般为tH2=1~2 s[5],语音识别tH3<1 s[13],因此图1中听视觉交互确认的时间tH5=max (tH1,tH2+tH3)=5 s。当视听一致情况下后续指令均为系统自动产生,仅需一次人工确认tH6=tH2,且小于2 s,因此完整的人员绩效的最大反应时间tH7=tH5+tH6=7 s。当视听不一致情况,仍采用原陆空通话确认方式,ACPS不会导致反应时间的增加。
ACPS主要用于改善人员绩效的反应时间,可以将反应时间由47~98 s[14]下降至7 s,进而提高沟通效率。
3 结 论
(1) ACPS在不降低系统安全性的基础上将通信时间缩减至7 s,提高了陆空通话效率。
(2) ACPS减少了机组人员工作量,进而潜在地提高飞行员的表现,保证飞行安全;通过人工智能机器人进行沟通,减少语言、口音和其他干扰因素的影响,减少二次确认过程,提高了沟通效率。
猜你喜欢
科普童话·神秘大侦探(2023年1期)2023-05-30 12:48:10
民航管理(2019年2期)2019-06-04 03:50:22
劳动保护(2019年3期)2019-05-16 02:38:00
测控技术(2018年5期)2018-12-09 09:04:26
中华诗词(2018年5期)2018-11-22 06:46:08
电子测试(2018年18期)2018-11-14 02:30:34
发明与创新(2016年30期)2016-08-22 11:35:24
电信科学(2014年1期)2014-09-29 04:48:34
机电信息(2014年27期)2014-02-27 15:53:56
河南科技(2014年22期)2014-02-27 14:18:31