
基于UWB的车库交互系统研究
2020-06-26 06:24冯九发黎宇恒黄建泉黄市生刘子文
机电信息 2020年6期
冯九发 黎宇恒 黄建泉 黄市生 刘子文


摘要:为实现车库的高交互性能和准确定位,针对现有车库交互性能差、找车难、停车难且取车麻烦的问题,设计了基于UWB(超宽带)和多传感器数据融合的车库交互系统。实验证明,UWB定位系统自动生成的参考倒车路线与人工倒车路线基本吻合时能成功把车倒进空车位里,基于自适应滤波算法的UWB定位系统方案可行且定位准确。
关键词:UWB;定位;车库;倒车
0 引言
随着科技智能化进步,汽车保有量迅速攀升,高交互性的车库系统逐渐融入人们的生活中,使停车、取车更加方便快捷。而现有的车库车位识别装置大多采用IC卡的方式对车位进行管理,车主通过刷卡的方式进行车位使用,后台系统根据刷卡结果仅能反映车位数量的使用情况,却无法指示具体的空余车位位置,管理不便。再者,车库内的停车环境有别于露天,车库内倒车没有较好的参考,很多车主需要多次挪动才能把车倒进车位内,耗时耗精力。此外,现有的车库均需要车主自主记忆车辆所停位置,时常发生车主忘记给停车标示码拍照而不能快速找到自家车的位置的问题。
1 方案设计
针对上述问题,本文将探究UWB(超宽带)定位[1]和多傳感器结合再加上自适应滤波算法[2]在车库交互系统中的实际应用效果。该车库交互系统包括UWB基站和贴有UWB定位标签的车辆入场卡,车辆入场卡设有液晶屏幕,用户将车辆入场卡放在车内用于导航,UWB基站设置在车库的停车区内。该车库交互系统还包括:停车区内的每个停车位上均设有压力传感器,用于确认有车停进;车库的入口处设置开关闸和车牌识别仪[3]。UWB基站、车辆入场卡、压力传感器、车牌识别仪均与终端连接,车主的手机上带有服务端的APP,终端与服务端网络连接。
UWB是通过发送和接收纳秒或纳秒级以下的极窄脉冲来传输数据[4],因此具有GHz量级的带宽。采用TDOA和AOA定位算法[5]对标签位置进行分析具有分辨能力强、精度高的优势,但依然存在一些定位误差。为了尽可能减少定位误差,本文采用自适应滤波算法(LMS)对UWB返回的数据进行处理,消除包含在基本信号中的未知干扰,其方法是把基本信号用作自适应滤波器的期望响应,传感器获取的数据用作滤波器的输入,期望信号为含有噪声的信号源,经过多次迭代,期望信号和自适应滤波器的输出信号之差就是信号源的估计。经过自适应滤波,位置误差极大地减小,从而把TDOA和AOA定位算法的误差降到最低。LMS在处理定位数据与显示坐标的上位机软件运行。
2 实验设计
如上文所述,该车库交互系统主要依赖于UWB定位的高精准性,下文将重点验证在UWB定位的可行性,验证的指标是基于UWB定位系统自动生成的参考倒车路线与人工倒车路线基本吻合时能否成功把车倒进空车位里。当压力传感器响应时,证明车辆已经停入车位,基于车辆入场时被车牌识别仪获取的车牌号,用户的APP会显示自家车的停车信息,方便后续取车,达到一个良好的交互性能。
如图1所示,设置3个基站与一辆车来验证本文的方案,图示左下角为UWB基站0,右下角为UWB基站1,右上角为UWB基站2,UWB标签设置在车内,如此构成实验系统。3个基站的位置以及UWB标签的定位通过上位机软件显示,UWB的型号为DWM1000定位模块,参数如表1所示。三个基站摆成直角阵势,形成X与Y轴,如此可以定位小车的移动坐标。
3 实验数据与分析
利用上文的3基站+移动标签做实验,首先在这3个基站的平面坐标系中做好车位五个点的划定,即车位的四个角的坐标加上车位中心的坐标[实验中车位的中心坐标为(1.3,0.7)],定好这五个点即可让系统生成倒车的参考路线,用户可借鉴车辆入场卡显示的参考路线进行倒车,UWB定位系统也会实时检测用户倒车时的移动坐标,如果人工路线与参考路线发生较大的偏差,车辆入场卡的蜂鸣器将会提醒。
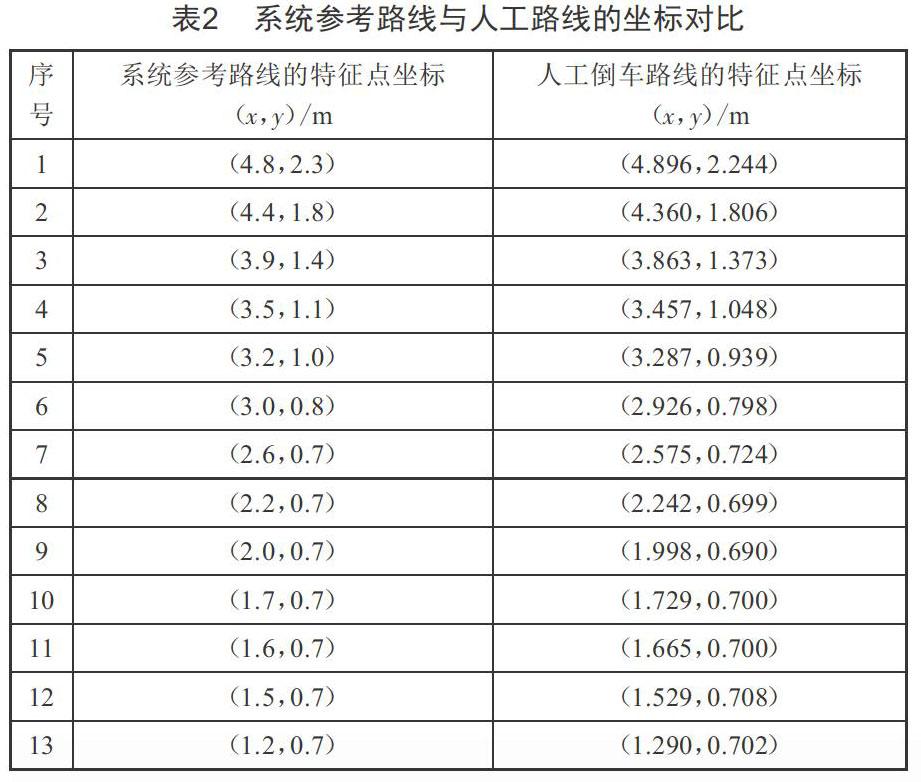
在严格保障人工路线与参考路线不发生较大偏差的情况下,得到表2的数据,左侧为系统生成的倒车路线的特征点坐标,右侧为人工倒车时被系统记录的坐标,对表2数据进行横向对比,可知误差最大不超过0.096 m;对表2数据进行纵向对比,可知人工路线基本吻合于参考路线,人工倒车形成的路线如图2所示。
由此可见,基于本文的UWB定位系统,人工倒车严格借鉴系统设定的参考路线能很好地完成停车。此外,人工路线与参考路线基本吻合所取得的成功停车的效果也证明了本文的UWB车库交互系统方案可行,并且定位精确性较高。
4 结语
本文主要基于UWB、自适应滤波算法和多传感器融合设计了一种UWB定位车库交互系统,用于定位空余车位的位置,获取车辆的最后停放位置来确定停车信息,帮助导向停车路线和倒车路线以及取车路线。经过实验得知,UWB定位系统自动生成的参考倒车路线与人工倒车路线基本吻合时能成功把车倒进空车位里,因此,基于自适应滤波算法的UWB定位系统方案可行且定位准确。本研究可以为车库交互系统的设计和应用提供有效的借鉴。
[参考文献]
[1] 顾慧东,焦良葆,周健.室内UWB通信高精度定位系统设计[J/OL].软件导刊:1-5(2019-11-22)[2020-01-08].https://
kns.cnki.net/KCMS/detail/42.1671.TP.20191122.1620.
054.html.
[2] 韩广超,王锋,赵河明,等.一种超宽带无线电引信回波信号处理算法[J].弹箭与制导学报,2016,36(5):67-70.
[3] 张萍.基于MATLAB的汽车牌照自动识别技术研究[J].自动化技术与应用,2019,38(11):132-135.
[4] 姜文峰.基于区域判定的超宽带井下高精度定位[J].电子世界,2019(3):193-194.
[5] 徐军,李群群,王曰辉,等.室内移动目标定位系统设计[J].电子技术应用,2018,44(12):44-46.
收稿日期:2020-01-08
作者简介:冯九发(1998—),男,广东东莞人,研究方向:信息交互及机电工程。
猜你喜欢
中学生英语·中考指导版(2020年2期)2020-08-06
福建基础教育研究(2019年11期)2019-05-28
爱你·健康读本(2018年3期)2018-05-14
杂文选刊(2018年1期)2018-01-09
中学生数理化·高一版(2017年1期)2017-04-25
今古传奇·故事版(2016年21期)2016-12-07
爆笑show(2016年3期)2016-06-17
疯狂英语·阅读版(2013年2期)2013-03-22
小朋友·聪明学堂(2009年11期)2009-11-28
雕塑(1996年3期)1996-07-12
