
多路径约束下的高超声速滑翔飞行器再入制导
2020-06-22 11:05王子瑶唐胜景
导弹与航天运载技术 2020年3期
王子瑶,唐胜景,郭 杰,王 肖
多路径约束下的高超声速滑翔飞行器再入制导
王子瑶,唐胜景,郭 杰,王 肖
(北京理工大学宇航学院飞行器动力学与控制教育部重点实验室,北京,100081)
高超声速滑翔飞行器在再入过程中除了需要满足热流、过载、动压过程约束外,还需要满足航路点以及禁飞区的路径约束。路径约束可以是发射前装订的,也可以是实际飞行中由导航卫星、预警雷达等在线探明的敌方防御区。针对再入过程中存在在线探明禁飞区的再入制导问题,设计了解析倾侧角剖面以满足再入轨迹航程约束,引入预测校正算法修正倾侧角剖面,并基于人工势场法设计了侧向制导方法以满足在线探测到突发威胁而形成的多路径约束。仿真结果验证了该算法能够有效解决存在突发威胁的多路径约束再入问题。
高超声速滑翔飞行器;多路径约束;再入制导;人工势场法
0 引 言
高超声速滑翔飞行器(Hypersonic Gliding Vehicle,HGV)作为远程快速精确打击系统武器,具有大航程、宽速域、强突防的特点[1,2]。HGV的再入飞行任务除了需要满足终端约束,热防护、过载、动压等过程约束外,还需要满足路径约束。路径约束可以是在发射前就装订好,包含任意多个航路点和任意形式的地理障碍禁飞区,也可以是实际飞行中由导航卫星、预警雷达等在线探明的敌方防御区等突发威胁区域[3]。
针对HGV再入制导问题,文献[4]设计了线性倾侧角剖面,并以航程误差预测校正剖面初值以满足终端航程约束;文献[5]设计了分段倾侧角剖面,分析并解决了终端航程与高度约束不匹配的问题。但其均未考虑航路点、禁飞区等路径约束问题。
人工势场法(Artificial Potential Field Method,APFM)为一种路径规划方法,在无人车[6]、无人机[7]、机械臂[8]等领域获得较广的应用。文献[2,9]将APFM应用在HGV再入制导中,实现了发射前已知航路点的途径和禁飞区的躲避,但其均未考虑在线探明禁飞区的路径约束的影响。
本文针对HGV再入制导问题,设计解析倾侧角剖面满足热流密度、过载、动压过程约束及终端约束,引入预测校正算法减小终端航程误差,并针对再入飞行过程中HGV自身预警雷达探测到突发威胁而形成的多路径约束,基于APFM确定航向角走廊,完成途径航路点并躲避各类禁飞区。仿真结果表明该算法能够同时约束终端航程和高度,并满足存在在线探明禁飞区的多路径约束。
1 问题描述
1.1 再入运动方程
假设地球为均匀球体,并忽略其自转效应,则HGV的三自由度无量纲运动方程为[10]


1.2 多约束条件描述
典型的再入过程约束包括:

另外,本文将准平衡滑翔条件(Quasi-Equilibrium Glide Condition,QEGC)作为软约束以保证HGV稳定性:
不同飞行任务对应不同的终端约束条件。本文中HGV需要满足的终端约束主要包括终端高度约束、速度约束、经纬度约束以及航向角约束。不失一般性,定义能量形式的无量纲变量为
且

即能量是单调增加的,于是终端约束可以表示为







2 制导算法
2.1 约束转化
考虑到再入飞行初始段的气动热保护要求和滑翔段的航程要求,攻角通常采用如下的分段函数形式:
基于攻角方案可由过程约束式(3)~(5)建立高度-速度(-)剖面内的再入走廊:


于是,当倾侧角满足该幅值约束时,HGV即可满足热流密度、动压和过载约束。
2.2 解析倾侧角剖面设计
初始下降段飞行高度较高,气动作用微弱,通常采用常值倾侧角开环制导,并当满足一定条件后转入滑翔段[10,12,13]。
参考文献[5]方法,设计解析倾侧角剖面为

首先建立以无量纲能量为自变量的纵向运动方程:
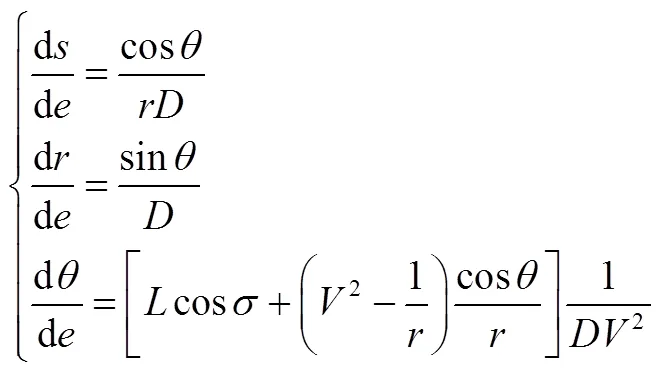




图1 倾侧角剖面
此倾侧角剖面满足终端约束,但得到的轨迹通常是振荡的。本文通过在倾侧角指令中反馈高度变化率,使升力更快地平衡重力,从而抑制高度震荡问题,使轨迹满足QEGC,即:


2.3 基于APFM的侧向制导算法
2.3.1 人工势场设计
APFM数学表达简单,在机器人领域已被广泛应用,能高效解决避障问题[2]。APFM的基本思想是将机器人运动空间环境视为一个虚拟的势场模型,目标点对机器人产生引力,障碍物对机器人产生斥力,机器人在引力和斥力的合力作用下向目标点运动[13,14]。


其中,

针对已知禁飞区,设计斥力为
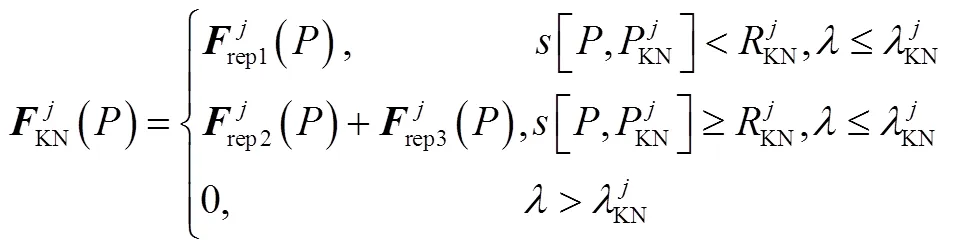






式中
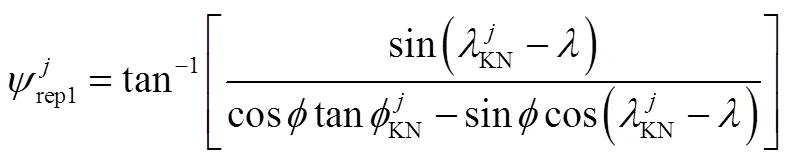


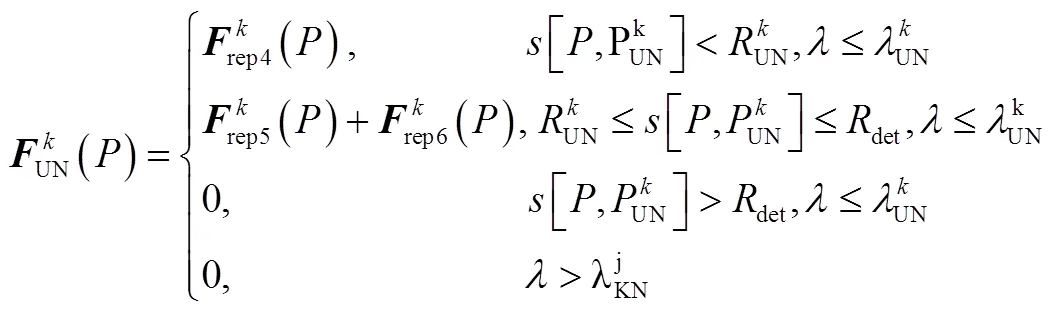


式中


HGV受力分析如图2所示,则HGV在人工势场中受到的合力为

2.3.2 倾侧角反转逻辑设计
采用航向角走廊方法确定倾侧角符号[12]来进行侧向制导。通过APFM得到的合力决定HGV的参考航向角:

进一步为了保证成功规避禁飞区,约束航向角走廊上下界为
当航向角超出航向角走廊,改变倾侧角符号;当航向角未超出航向角走廊,保持倾侧角符号不变。即
式中 为当前时刻的倾侧角;为上一时刻倾侧角。
3 仿真分析

表1 再入初始状态
Tab.1 Reentry Initial States
/km/(°)/(°)/(°)/(°) 8010-207100-145 /km /(°) /(°)—— 2590302000—— /(°)/(°) /(°)— 10.50.51008—
表2 再入终端约束及允许误差
Tab.2 Reentry Terminal Constraints and Premissible Errors
/km /(°)/(°)— 2590302000— /(°)/(°)/(°) 10.50.51008
表3 航路点与禁飞区约束
Tab.3 Waypoint and No-fly Zone Constraints
航路点位置已知禁飞区1中心位置已知禁飞区2中心位置未知禁飞区中心位置 PW(65°,15°)(50°,15°) (60°, 5°) (75°,22°) 航路点约束已知禁飞区1半径已知禁飞区2半径未知禁飞区半径 300300200
仿真结果如图4~7所示。

图4 地面轨迹
从图4的再入地面轨迹可以看出,本文设计的基于APFM的再入制导算法不仅能够途经发射前已知的航路点并躲避已知禁飞区,且能够躲避再入过程中在线探明的禁飞区,满足多路径约束。HGV的终端误差如表4所示,均满足终端约束。
表4 HGV终端误差
Tab.4 HGV Terminal Errors
/(°)/(°)/(°) 135.480.01890.0241-18.347.31
图5为本文得到的轨迹符合热流密度、动压、过载等过程约束,且倾侧角指令中的高度变化率反馈使轨迹平滑,满足QEGC。图6为倾侧角剖面,均满足倾侧角幅值约束,初始段有一定的波动以调整高度变化率使轨迹满足QEGC。

图5 H-V剖面

图6 倾侧角剖面
图7表示HGV的航向角,指向目标的视线角和APFM合力指向的参考航向角。

图7 航向角,视线角及参考航向角
从图7中可知,HGV再入1201 s时,参考航向角出现尖点。此为HGV途经航路点时,因HGV与航路点距离很近,由式(26)可知,航路点引力大小与距离的三次方成反比,此时引力很大,参考航向几乎指向航路点;当HGV经过航路点后,引力突变指向下一个航路点,于是参考航向角突变。当HGV再入至1422 s时,HGV在线探测到未知禁飞区,参考航向角发生变化,开始机动躲避,并于1453 s飞离禁飞区。
4 结束语
除了HGV再入过程中遇到的典型过程及终端约束外,本文还考虑了HGV在线探明的突发威胁禁飞区。针对含有多路径约束的再入制导问题,设计了解析倾侧角剖面来满足过程约束和终端约束,并引入预测校正修正倾侧角剖面参数,以减小终端状态误差。针对再入飞行过程中HGV自身在线探明的敌方禁飞区,基于APFM设计了侧向制导算法。仿真结果表明,所设计的再入制导方法除了能满足再入轨迹各类约束外,还可以有效躲避再入飞行过程中在线探明的禁飞区。
[1] 黄长强, 国海峰, 丁达理. 高超声速滑翔飞行器轨迹优化与制导综述[J]. 宇航学报, 2014, 35(4): 369-379.
Huang Changqiang, Guo Haifeng, Ding Dali. A survey of trajectory optimization and guidance for hypersonic gliding vehicle[J]. Journal of Astronautics, 2014, 35(4): 369-379.
[2] Li Zhenhua, Yang Xiaojun, Sun Xiangdong, et al. Improved artificial potential field based lateral entry guidance for waypoints passage and no-fly zones avoidance[J]. Aerospace Science and Technology, 2019(1): 119-131.
[3] 张远龙, 谢愈. 滑翔飞行器弹道规划与制导方法综述[J]. 航空学报, 2020, 41(1): 50-62.
Zhang Yuanlong, Xie Yu. Review of trajectory planning and guidance methods for gliding vehicles[J]. Acta Aeronautica et Astronautica Sinica. 2020, 41(1): 50-62.
[4] Lu Ping. Entry Guidance: A unified method[J]. Journal of Guidance Control & Dynamics, 2014, 37(3): 713-728.
[5] 王肖, 唐胜景, 祁帅, 等. 带终端高度约束的再入预测校正制导[J]. 战术导弹技术, 2018(4): 70-77.
Wang Xiao, Tang Shengjing, Qi Shuai, et al Predictor-corrector entry guidance with terminal altitude constraint[J]. Tactical Missile Technology,. 2018(4): 70-77.
[6] Huang Yanjun, Ding Haitao, Zhang Yubiao, et al. A motion planning and tracking framework for autonomous vehicles based on artificial potential field elaborated resistance network approach[J]. IEEE Transactions on Industrial Electronics. 2020, 67(2):1376-1386.
[7] 徐博, 张大龙. 基于量子行为鸽群优化的无人机紧密编队控制[J]. 航空学报, 2020, 41(5): 323722.
Xu Bo, Zhang Dalong. Close formation control of UAV based on pigeon group optimization of quantum behavior[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(5): 323722.
[8] 谢龙, 刘山. 基于改进势场法的机械臂动态避障规划[J]. 控制理论与应用, 2018, 35(9): 1239-1249.
Xie Long, Liu Shan. Dynamic obstacle-avoiding motion planning for manipulator based on improved artificial potential field[J]. Control Theory & Applications. 2018, 35(9):1239-1249.
[9] Da Zhang, Lei Liu, Yongji Wang. On-line Reentry guidance algorithm with both path and no-fly zone constrains[J]. Acta Astronautica. 2015: 243-253.
[10] Shen Zuojun, Lu Ping. Onboard generation of three-dimensional constrained entry trajectories[J]. Journal of Guidance, Control & Dynamics, 2003, 26(1): 111-121.
[11] 谢愈, 刘鲁华, 汤国建, 等多约束条件下高超声速滑翔飞行器轨迹优化[J]. 宇航学报, 2011, 32(12): 2499-2504.
Xie Yu, Liu Luhua, Tang Guojian, et al. Trajectory optimization for hypersonic glide vehicle with multi-constraints[J]. Journal of Astronautics. 2011, 32(12): 2499-2504.
[12] Xue Songbai, Lu Ping. Constrained predictor-corrector entry guidance[J]. Journal of Guidance, Control & Dynamics, 2010, 33(4): 1273-1281.
[13] 张化锴, 张曦文, 王清礼. 基于路径预测人工势场法的自动跟随小车路径规划[J]. 计算机测量与控制, 2019, 27(1): 237-240.
Zhang Huakai, Zhang Xiwen, Wang Qingli. Path planning based on path prediction artificial potential field method for automatic following trolley[J]. Computer Measurement & Control, 2019, 27(1): 237-240.
[14] 张殿富, 刘福. 基于人工势场法的路径规划方法研究及展望[J]. 计算机工程与科学, 2013, 35(6): 88-95.
Zhang Dianfu, Liu Fu. Research and development trend of path planning based on artificial potential field method[J]. Computer Engineering & Science, 2013, 35(6): 88-95.
[15] Richie G. The common aero vehicle: space delivery system of the future[C]. Albuquerque: Proceedings of the AIAA Space Technology Conference and Exposition, 1999.
[16] Phillips T H. A common aero vehicle (CAV) model, description, and employment guide[R]. Schafer Corporation of AFRL and AFSPC, 2003.
Reentry Guidance for Hypersonic Glide Vehicle with Multiple Path Constraints
Wang Zi-yao, Tang Sheng-jing, Guo Jie,Wang Xiao
(Key Laboratory of Dynamics and Control of Flight Vehicle, Ministry of Education, School of Aerospace Engineering, Beijing Institute of Technology, Beijing, 100081)
In the process of reentry, in addition to constraints of heat flow, overload and dynamic pressure, the hypersonic glide vehicle also needs to satisfy path constraints of waypoints and no-fly zones. The path constraints can be preset before the launch. During the flight, no-fly zones can be enemy defensive zones detected by navigation satellites and early warning radars. Aiming at the reentry guidance problem with sudden threats detected in the reentry process, an analytic bank angle profile is designed to satisfy a trajectory range constraint, and the predict-correct algorithm is introduced to amend the bank angle profile. The lateral guidance is based on the artificial potential field method to satisfy the multiple path constraints with sudden threats. Simulation results verify that the algorithm is able to solve the reentry guidance problem with multiple path constraints.
hypersonic gliding vehicle; multiple path constraints; reentry guidance; artificial potential field method
1004-7182(2020)03-0061-07
10.7654/j.issn.1004-7182.20200312
V448
A
王子瑶(1993-),男,博士研究生,主要研究方向为飞行器总体设计、飞行器动力学与控制。
唐胜景(1959-),男,博士,教授,博士研究生导师,主要研究方向为飞行器总体设计、飞行器动力学与控制。
郭 杰(1981-),男,博士,副教授,硕士研究生导师,主要研究方向为飞行器总体设计、飞行器动力学与控制。
王 肖(1991-),男,博士研究生,主要研究方向为飞行器总体设计、飞行器动力学与控制。
2020-04-13;
2020-04-27
国家自然科学基金(11202024,11572036)
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
火力与指挥控制(2022年2期)2022-03-23
西安航空学院学报(2021年1期)2021-07-20
当代陕西(2019年17期)2019-10-08
无人机(2018年2期)2018-09-10
师道(2018年6期)2018-07-16
航空模型(2017年7期)2017-08-15
