
改进BP神经网络的滚珠丝杆故障诊断研究
2020-06-20 03:35:56林名润闫大鹏乔凤斌
机械设计与制造 2020年6期
林名润,王 杰,闫大鹏,乔凤斌
(上海航天设备制造总厂有限公司,上海 200245)
1 引言
滚珠丝杆具有噪声小、传动效率高、精度高、低摩擦等优良性能,已广泛应用于数控机床、航天航空、汽车工业等领域[1]。滚珠丝杠往往长期处于高速、变载、超负荷等恶劣工况下运行,由于螺杆与滚珠之间处于接触状态,摩擦、振动、冲击等因素会使其传动效率、定位精度、平稳性恶化,进而引发故障[2]。
滚珠丝杆作为数控机床的关键部件之一,其故障直接影响设备运行,造成生产产品超差或报废。如何保证滚珠丝杆高性能状态运行,已成为当前亟待解决的难题,这就需求对滚珠丝杆设计、制造、工艺和检测技术进行不断创新[3]。其中,开展滚珠丝杆故障诊断技术和方法研究,是行之有效地解决数控机床状态监测、故障诊断、预防维护的途径之一。通过建立滚珠丝杆故障模型,利用振动信号提取滚珠丝杆特征数据,展开特征参数、故障率与运行周期变化三者之间关联性研究;以及滚珠丝杆故障类型的诊断研究,为解决系统故障问题提供理论依据。
2 滚珠丝杆失效分析
滚珠丝杠的失效主要有三种典型形式:表面损伤失效、变形失效、断裂失效[4]。表面损伤失效通常由零件表面的形状、尺寸和粗糙度异常引起设备无法正常工作或失去精度;变形失效是由于在外载荷作用下使零部件结构变形量超过允许值,从而使设备无法正常工作,或者出现不合格产品;断裂失效是在静力作用下,使零件的某个剖面应力超过材料的强度极限,从而引发零件结构断裂,机器设备运行异常。其失效形式与原因分析,如表1所示。

表1 滚珠丝杆失效形式与原因分析表Tab.1 Ball-Screw Failure Forms and Reasons Analysis
3 BP神经网络原理及优化
3.1 BP神经网络原理
在1985年由文献[5]提出了BP神经网络(Back propagation),该网络是一种多层前馈神经网络。建立系统故障诊断模型时,该算法的输入信号在前向传递过程是沿输入层、隐藏层、输出层逐级处理,将输出误差反向传播修正各层的网络权值和阈值,使网络预测输出不断逼近期望输出,直到满足使用要求[6]。BP神经网络拓扑结构,如图1所示。

图1 BP神经网络拓扑结构图Fig.1 Topological Schematic of BP Neural Network
假设BP神经网络结构为三层网络结构,输入层、隐含层、输出层节点数分别为m、p、n。输入层、隐含层输入、隐含层输出、输出层输入、输出层输出、期望输出向量分别为 X、Hi、Ho、Yi、Yo、do。输入层、隐含层和输出层神经元之间的连接权值及阈值分别为wij、wjk、bh、bo。样本个数为θ=1,2,…,r,激活函数为f(·),误差函数e为:

前向传递过程,隐含层节点输出为:

其中,h=1,2,3…p;
输出层节点输出为:

其中,o=1,2,3…n;
反向传播时,输入层、隐含层与输出层各神经元更新网络连接权值修正公式为:

式中:η—学习速率;
全局误差Err为:

上述算法存在一些明显缺陷:
(1)网络在学习过程收敛速度慢;
(2)学习率为恒定值,无法在现调整;
(3)在网络训练过程中容易发生振荡,导致网络无法收敛等[7]。基于这些弊病,需对该算法进行优化。
3.2 BP神经网络的算法优化
3.2.1 自适应学习率的算法优化
学习参数的选取是影响算法性能优劣的关键因素之一[8],采用自适应调整学习率的方法,可实现在一定范围内使学习率进行在线调整,改善网络的训练时间和误差率[9]。该算法根据总误差变化的信息进行启发式调整,其控制策略为:(1)当系统全局误差Err减小,则学习率增加;(2)若系统全局误差Err增加,则学习率减小。当新误差与老误差之比超过一定值,则学习率快速下降,提高算法的收敛速度和网络的稳定性。上述策略的迭代方程可描述为:

式中:γinc—学习率增量因子;
γdec—学习率减量因子;
β—误差修正过量系数。
3.2.2 附加动量项的算法优化
附加动量项的优化算法控制策略是由当前误差曲面的负梯度变化量与前一次迭代修正所采用的权值变化量的适当比例求和所得到的,其权值的迭代方程可描述为:

式中:α—动量因子,0<α<1。
可以看出,该算法充分考虑了之前训练经验积累的影响,从而使网络允许使用较大学习速率系数来提高网络收敛速度。引入附加动量项因子,可以抑制BP神经网络训练中可能发生振荡的现象,提高网络系统稳定型;与此同时,也有效地缓解误差局部的敏感性,避免BP神经网络出现局部极小值的情况。
4 测试试验建立与分析
为展开滚珠丝杆故障诊断研究,建立一套测试试验装置,其主要由滚珠丝杆测试工作台和振动信号采集系统两部分组成,如图2所示。滚珠丝杆运行工作台通过伺服控制系统和外部载荷质量块实现对滚珠丝杆转速和负载控制。振动信号采集系统是通过NI的PXI6281数据采集卡来实现对压电式加速度传感器的信号采集。其中,加速度传感器采用恒流源供电。
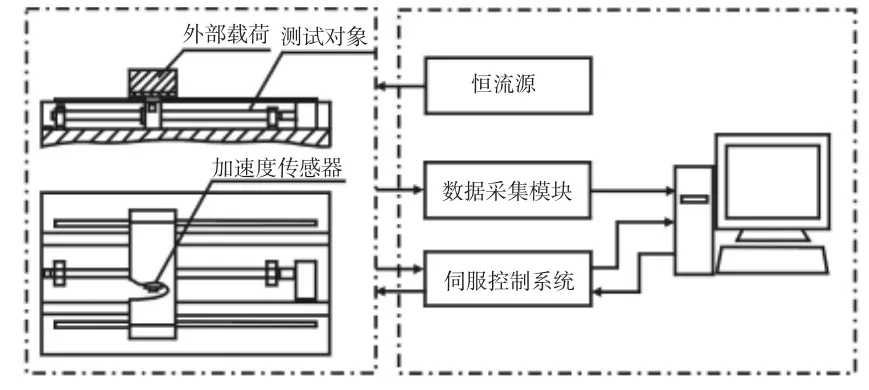
图2 测试试验平台工作原理示意图Fig.2 Principle Schematic of Test Platform
5 算法建立与分析
5.1 特征参数与故障类型
滚珠丝杆各零件的几何偏差、几何缺陷、表面波纹度、滚珠通过频率、润滑因素等因素都可以导致振动激励的产生。其中,几何缺陷产生的激励相比零件几何偏差、表面波纹度等因素产生的激励要大的多,因此,选择振动信号时域和频域特征参数作为输入节点[10]:平均值幅值指标X1、均方根幅值指标X2、峰值指标X3、脉冲指标X4、裕度指标X5、峭度指标X6。
根据滚珠丝杆通常失效形式,选取四种典型故障类型进行模拟测试,并提取振动信号数据的特征参数进行对比分析研究,判定滚珠丝杆的故障形式。其中,作为输出节点的四种故障类型,分别为螺杆变形失效Y1、螺母滚道损伤失效Y2、滚珠损伤失效Y3、滚珠断裂失效 Y4。
5.2 神经网络结构
神经网络隐含层节点数与解决问题难易程度、样本数据特征或性质等因素有着直接联系。若神经元节点数量选择太少,将降低整个神经网络性能,甚至造成网络无法训练;若神经元节点数量过量,虽然可以有效地减小网络系统误差,但在学习过程中会使迭代运算大幅增加、网络结构复杂化。因此,在满足函数要求的前提下,尽可能减少节点数量,从而提高求解的收敛速度。这里根据输入层与输出层节点数确定隐含层节点,采用方法为p≥。综上所述,建立神经网络结构:输入层节点数为6,隐含层节点数为6,输出层节点数为4。
5.3 初始权值与阈值
采用(0~1)的随机数算法,生成输入层、隐含层与输出层之间的初始阈值和权值,如表2、表3所示。
5.4 训练样本与规范化
在相同外部载荷和转速条件下,对不同故障类型的滚珠丝杆进行测试试验,并采集、分析、提取振动信号的特征参数,每种模式选择15组数据作为样本,以供神经网络训练学习。由于原始输入输出数据有着不同的可变幅度和物理意义,在进行网络训练前需要对这些数据进行规范化处理,从而使神经网络发挥出最优性能。这里采用归一化数据处理方法,将其限制在[0,1]范围内,即:x¯i=(xi-xmin)/(xmax-xmin)。其中,xi—原始输入或输出数据;xmin、xmax—原始输入或输出数据中的最小值和的最大值。
基于神经网络算法采用误差调节权值原理,为避免输出误差大小不均造成误差占比波动大的问题,这里采用Sigmoid函数作为激活函数。
5.5 神经网络训练
取神经网络训练误差精度为10-6,训练次数最大值为2000次,通过迭代调整BP网络的影响因子,使BP网络逐渐逼近设定的训练数据,并达到精度要求。为减少BP网络出现冗余结构,在训练过程中进行数据跟踪,从而控制BP网络训练学习过程。整个BP网络训练学习结束后,更新的阈值与权值,如表2、表3所示。

表2 网络初始与训练后的阈值数据表Tab.2 The Initial and Trained Threshold Data

表3 网络初始与训练后的权值数据表Tab.3 The Initial and Trained Weight Data
5.6 神经网络诊断
采用获取训练样本数据的方法,分别提取滚珠丝杆不同故障类型的特征参数数据,并进行归一化处理,作为后续故障类型诊断验证的检测数据。作为检验BP网络的归一化测试数据,如表4所示。

表4 归一化测试样本数据表Tab.4 The Normalized Data of Test Sample
将归一化测试样本数据作为BP神经网络诊断预测分析的输入参数值,来检验BP神经网络对滚珠丝杆故障类型的诊断预测能力。试验结果表明,针对滚珠丝杆不同故障类型该BP神经网络均作为出准确诊断,且单一样本类型故障类型诊断概率均高于90%,远大于其他故障类型,有效地避免误判,如表5所示。

表5 期望输出与实际诊断对比Tab.5 Comparison of Theoretical Output and Real Diagnosis
6 结论
以滚珠丝杆故障失效为研究对象,分析了其失效原因;通过不同故障类型的测试试验,提取各种故障状态下的信号特征参数作为样本数据;提出了基于自适应学习率和附加动量项的改进BP神经网络算法,并验证BP神经网络对滚珠丝杆故障类型诊断能力。通过试验结果表明:(1)通过引入自适应学习率和附加动量项改进BP神经网络算法,有效地提升了网络收敛性和稳定性;(2)该BP神经网络通过对训练样本的学习,准确地诊断出滚珠丝杆的故障类型;(3)单一样本类型故障类型诊断概率均高于90%,有效地避免故障类型误判。
猜你喜欢
中国设备工程(2024年9期)2024-05-13 06:05:08
橡塑技术与装备(2022年10期)2022-10-03 07:39:14
成都信息工程大学学报(2022年3期)2022-07-21 09:35:04
沈阳师范大学学报(教育科学版)(2021年2期)2021-02-01 07:00:46
沈阳师范大学学报(教育科学版)(2021年2期)2021-02-01 07:00:46
橡塑技术与装备(2021年2期)2021-02-01 03:36:18
制造技术与机床(2019年11期)2019-12-04 05:50:26
自动化学报(2017年7期)2017-04-18 13:41:02
深圳职业技术学院学报(2015年5期)2015-11-30 06:22:25
机械制造与自动化(2014年1期)2014-03-01 04:21:45
