
Gimbal orientation study and assessment for the autonomous underwater vehicles
2020-06-19 11:14:28SudhirKumrChturvediSourvBsuSiktBnerjee
Sudhir Kumr Chturvedi ,Sourv Bsu ,Sikt Bnerjee ,*
a Department of Aerospace Engineering, UPES, Dehradun 248007, Uttarakhand, India
b Department of Electrical Engineering, Jalpaiguri Government Engineering College, Jalpaiguri 735102, West Bengal, India
c Department of UAV and Remote Sensing, Wingbotics, Kolkata-700086, West Bengal, India
Received 17 May 2019; received in revised form 31 August 2019; accepted 5 September 2019
Available online 19 September 2019
Abstract Autonomous underwater vehicles are at present being used for scientif ic,commercial and military submerged applications. In this paper,a system has been proposed which can be used underwater as remotely operated underwater vehicle for submerged survey for different purposes. These systems require self-suff icient direction and control frameworks so as to perform submerged assignments. Displaying,framework identif ication and control of these vehicles are as yet real dynamic zones of innovative work. This theory is worried about the plan and improvement of an Autonomous Underwater Vehicle (AUV) specif ically proposed for passage into global submerged vehicle rivalries. The theory comprises of two stages; the f irst includes the plan and development of the vehicle while the subsequent stage is worried about the demonstrating and framework identif ication of the vehicle,just as the reproduction of a control system. The structure and advancement of the vehicle comprised of actualizing a mechanical and electrical framework,just as the reconciliation of subsystems. The framework identif ication of the vehicle parameters comprised of utilizing locally available sensors to perform static and dynamic tests. Least squares estimation was utilized to gauge the parameters from the pre-researched data obtained.
Keywords: IMU sensor; Gimbal stabilization; Kalman f ilter; MATLAB Simulink; Brushless DC motor.
1. Introduction
“Underwater” usually used as a term to describe the natural feature of the land underneath the shallow of water. This realm m ight be ocean,sea,lake,or river. Considering that the seventy per cent of the earth is enclosed by water,there are still lots to discover. Although there are some underwater activities that can be achieved by humans,underwater medium is a very hazardous environment and these activities cannot be performed for a long period of time. For that reason,research efforts on underwater robotics have been increased and,underwater vehicles (UVs) are started to be used for a w ide variety of tasks. The general name of these vehicles is Uninhabited Underwater Vehicles or Unmanned Underwater Vehicles (UUVs). There are mainly two types of underwater vehicles,remotely operated vehicles and autonomous underwater vehicles. The vast majority of the contexts today that require a specif ic degree of accuracy and ability are worked as Remotely Operated Vehicles (ROVs). Though,the agendas that perform repetitive errands are organized as Autonomous Underwater Vehicles (AUVs). ROVs are tethered underwater vehicles. These vehicles are usually used in deep water application such as offshore extraction of oil,and natural gases.ROVs are highly manoeuvrable and functioned by an individual on the mother ship where communication is achieved via tether [1] . This tether carries the electrical power and data from operator to the vehicle or vice versa. Since the data is transferred via tether; ROVs can be controlled directly by the human operator. By this way,human decision is included in the loop that enables the system to carry on precise operations in undetermined environments. Alternatively,AUVs don’t require such tether connections. Nevertheless,most survey class AUVs maintain acoustic communication w ith their human operator,in order to send the data and status of the vehicle. The limited bandwidth characteristic of acoustic communication makes the live streaming of the visual information and real-time control not possible. Both AUV and ROV systems can be modified by the addition of a robotic manipulator. These systems are called as Unmanned Vehicle Manipulator System (UVMS). It would be distinguished that by this addition,dexterity of the vehicle is increased while the control problems arise. Fig. 1 outlines the design flow of a UUV.However this methodology is also applicable for floating structures like ship and submarines too.

Fig. 1. Flowchart of the UUV Design (Source: Aytar and Dede,2009).
Complying with the design criteria,after the first two decisions on inclusion of a manipulator and configuring the system as an AUV or an ROV,the design flow remains the same for all UUVs. The designer must investigate the working conditions of the system for possible additions of fault tolerance features. After the selection of sensory information,navigation and localization equipment,dynamic prototypical of the system is developed. The dynamic model also includes the environment model with hydrodynamic effects. Later control architecture design is initiated. This design phase includes simulation studies and the verification of the developed controller and finally,the examination of the system through experimental studies [2] .
Various underwater vehicles are built up to this date. Most of these vehicles use thrusters for motion and steering. Usage of thrusters increases costs and because they are exposed to sea water,they have corrosion problems. Steering of the vehicle and the stability under environmental effects are going to be provided by internal moving masses. The volume of the vehicle is going to be changed to control the depth. Internal moving masses are used to relocate the centre of gravity of the vehicle; thus,the orientation of the vehicle will be changed.Change in the volume causes the change in the buoyancy and it leads to motion in heave direction. The research in this paper is focused on the design for internal moving masses mechanism. Conceptual designs are proposed and appropriate one is used for simulation tests to prove validity of the control for hovering stability under the impact of underwater hydrodynamic disturbance and steering [3] .
AutonomousUnderwaterVehicles: Autonomous underwater vehicles (AUVs) usually have only one thruster that is located at the backside of the vehicle. A number of sensory systems are located on the vehicle. These sensors are inertial measurement units that contain linear acceleration and angular velocity sensors,pressure-meter to observe vehicle depth,sonar systems; front sonar to measure the distance from obstacles,ground speed sonar to measure the speed of the vehicle relative to ground. Global Positioning System (GPS) is used to learn the exact location of the vehicle at the sea surface.The positioning through GPS can only be achieved when the vehicle surfaced. AUVs may also consist of acoustic systems that are used to learn the exact location of the vehicle in predefined areas. Also,acoustic communication can be used for data transfer between the base station and the vehicle. AUVs are supposed to be entirely self-governing,consequently relying on onboard power systems and intelligence.
The mechanical autonomy world has arrived at a phase where the remotely operated vehicle (ROV) industry is very entrenched with heaps of ROVs having been made and sent since the foundation of this industry. The requirement for autonomy in robots and vehicles,be that as it may,is ending up increasingly more a pervasive issue by and large and situations around the world. The capacity to convey between the administrator and the vehicle is one of the fundamental components affecting whether a vehicle is to be structured as an ROV or as a self-sufficient vehicle. One of the conditions in which communication is especially obliged is submerged.Submerged vehicles are assuming an imperative job in submerged investigation and enabling people to investigate incredible profundities. ROVs have been applied in the offshore business since the late 1960s and are settled and concentrated vehicles for deepwater missions. Notwithstanding,their imperatives,for example,the requirement for an interchanges tie and a control stage have constrained their utilization and abilities. this paper consists a technique for efficient adaptive control of submerged robots with changing body weight and elements [4] . The body weight changes when the robot grabs or drops off a payload. Our methodology joins balance control and buoyancy control. Specifically,we portray the design of two equipment modules: (1) a buoyancy control component and (2) a balance control mechanism. The buoyancy control system gives a power-efficient intends to make up for additional weight. It utilizes a cylinder to dislodge water. The equalization control framework gives an efficient approach to controlling the robot’s focal point of mass and by and large direction. It modifies the robot’s focal point of mass by moving an inside battery. Both of these frameworks spare significant vitality during the robot’s main goal and require power during modification as it were. We additionally depict robot control calculations that utilization buoyancy and equalization control to reaction to an adjustment in weight efficiently without expanding the thruster power and previous researched data.
2. Viscosity
Kirchhoff’s equations rely on the assumption that the fluid is inviscid and slips freely over the surface of the body. In reality,viscosity has an appreciable effect on the flow regime.This plays a significant role in the dynamics of the system,so much so that for bodies at large depths the contribution of potential damping is negligible in comparison. In a viscous fluid,a layer of fluid adheres to the solid boundary and friction between the adjacent layers of fluid forms a thin boundary layer over the surface. The relative flow velocity adjusts rapidly from zero at the surface of the body to the velocity of an effectively potential flow just outside the boundary layer. The velocity gradient of the boundary layer gives rise to viscous stresses that act on the surface of the body and retard its motion through skin friction. The boundary layer grows in the streamwise direction as the flow is deflected away from the body to avoid accumulation.For non-planar surfaces,a pressure gradient exists along the boundary layer due to the centrifugal effect of flow around a curved body. In the case of an adverse pressure gradient the flow decelerates as the pressure increases along the body. In a sufficiently adverse pressure gradient,the fluid cannot diffuse fast enough into the boundary layer and the flow separates from the body with the direction of flow over its surface reversed beyond the separation point. This forms a low-pressure wake that gives rise to a retardant force on the body that is known as pressure drag. The effects of viscous flow are highly dependent on the type of flow regime. Since boundary layers are composed of both laminar and turbulent regions,it is first necessary to determine the appropriate type of flow regime [5] . Turbulent boundary layers generally exert more frictional drag on a surface than laminar boundary layers,but nevertheless often results in a smaller overall drag as they are less prone to separation. An indicator of the dominant type of flow regime is the Reynolds numberwhereuis the velocity of the body,lis its characteristic length andνis the kinematic viscosity of the fluid. Whilst the technology exists to analytically solve the Navier Stokes equations and determine the exact effects of the hydrodynamic interactions,such calculations require sophisticated CFD packages and powerful computers and even then,can take several days to solve. Therefore,with current technology,these equations are not suitable for application onboard AUVs since they must determine the effects of drag in real-time. Therefore,empirical models must be relied upon. While these models cannot predict with great accuracy all the interactions of an unsteady,three-dimensional flow regime over a self-propelled underwater body,they can capture the essential elements of flow and provide an effective tool to approximate the hydrodynamic forces that act on the body. The viscous drag can be expressed by the following standard empirical model:
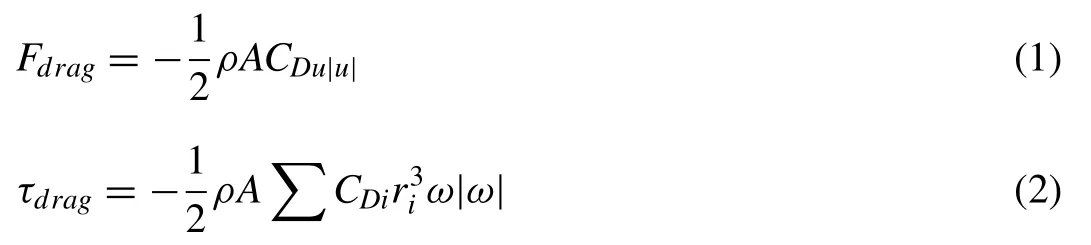
whereρis the density of the surrounding fluid,Ais the matrix of projected cross-sectional areas of the body,CDis the drag coefficient of the body andriis the mean distance to the centre of rotation. A body with three planes of symmetry has a diagonal matrix of drag coefficientsCDand so there is no coupling between the different degrees of freedom.The obligation of suitable standards forCDis essential to realistically model drag.
3. Basic gyro mechanical system
A gyroscope is a device for measuring or maintaining orientation. based on the principle of conservation of angular momentum. The essence of the device is a spinning wheel on an axle. The device,once spinning,tends to resist changes to its orientation due to the angular momentum of the wheel. In physics,this phenomenon is also known as gyroscopic inertia or rigidity in space.
This proposed project’s mechanical frameworks comprise of the vehicle structure,upper hull,actuators,and outside the enclosure. The upper hull and outside enclosure in areas are using for protecting the electronic parts and shielding them from water,while the structure gives mounting focuses and insurance to the majority of the sensors and walled in areas. The edge defines the positions and directions of each mechanical segment in the vehicle,keeping up the basic trustworthiness and unbending nature of the vehicle and securing sensitive parts. This casing will go about as a phenomenal stage for some extreme changes in the general vehicle’s structure. The casing accentuates simplicity of assembling and incorporation,convenience,alternatives for modification,and in reverse similarity [6] . The vast majority of the segments on the vehicle must be in a bad way straightforwardly to the vehicle,requiring no additional mounting highlights,which spares weight,lessens unpredictability,holds parts all the more safely,and makes gathering and dismantling simpler. All parts were put with the end goal that the focal point of mass.
Likewise,with air,underwater pressure is brought about by the weight of the medium,for this situation water,following up on a surface. absolute signifying the complete pressure and encompassing being of a relativistic sort. Adrift level,weight because of air is 1atm. For each 10 m of profundity,weight increments by about 1atm and subsequently,the total weight at 10 m submerged is 2atm. Albeit straight in nature,the expansion in weight as profundity increments is significant and submerged vehicles must be basically fit for withstanding a moderately enormous measure of weight on the off chance that they are to endure.
By performing different underwater moves of the vehicle at full speed previously by other researchers,it was seen that the vehicle was entirely steady,with roll and pitch developments being negligible. This was an immediate aftereffect of the symmetrical idea of the vehicle,just as the inborn metacentric correcting minute that went about as an aloof roll and pitch control framework. Since roll and pitch points are unimportant,at that point,therefore,roll and pitch speeds can likewise be viewed as irrelevant.
To incorporate the dynamic of the gyros in the future models of the system we need to have a model of the gyroscope compatible with the rest of the models used. In this case,an attempt to obtain a transfer function with angular velocity as input was done. From the transfer function,it is straightforward to get the state-space representation if required. For this particular case a second-order transfer function with cut-off frequency of 50 Hz was chosen.

where
ωr: resonance frequency = 50 Hz
ζ: damping factor = 0.7
4. Gimbal
A gimbal,also called a gimbal ring,is a mechanical device consisting of two or more rings mounted on axes at right angles to each other. An object mounted on a three-ring gimbal will remain horizontally suspended on a plane between the rings regardless of the stability of the base. Gimbals have a wide range of practical uses including aerospace applications.
A gimbal may be used to keep objects level in unstable environments. Gimbals are also extremely valuable in shipboard and aircraft environments when measuring instruments such as chronometers and compasses must be kept level with the horizon. Gimbals may also be used for aerospace navigation,as they can be set to provide a stable measurement from a specific reference point such as the earth or sun regardless as to their actual position in space. In this specific application,our gimbal will hold the cameras and instruments that instead the compasses will not be kept in horizontal position but will point to a fix position in the inertial frame,or will perform tracking of an object in that frame. Therefore,the selection of the gimbal configuration is of special importance.
4.1. Gimbal dynamics and kinematics
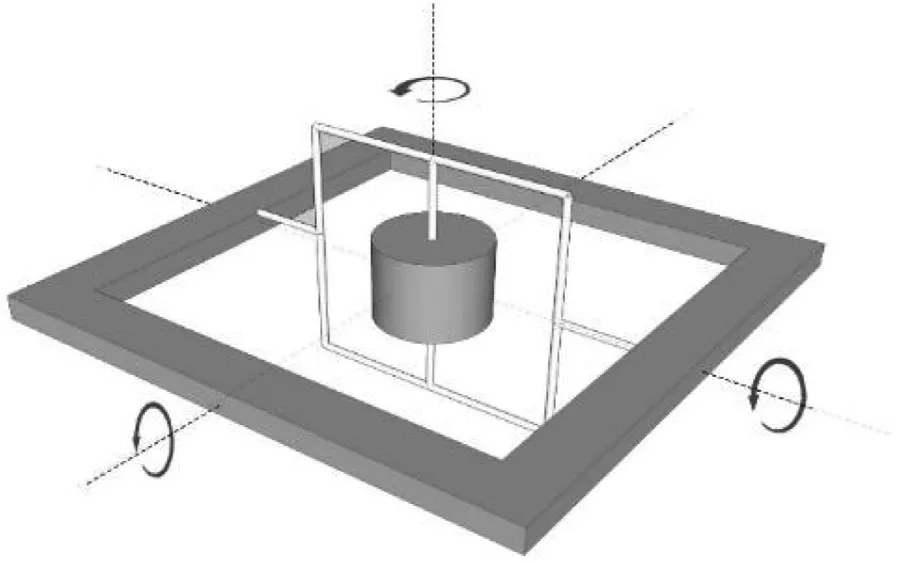
Fig. 2. The orientation of the gimbal (Source: Basu Himali Banerjee and Chaturvedi 2019).
Gimbals employed in aerospace navigation utilize Euler angles to orient an object such as a spacecraft. This work will also use Euler angles to develop the dynamics of the system. Euler angles are more intuitive,although not as robust as the quaternions,but can lead to gimbal locks and are not as efficient. A possible future work could be to develop a stabilization control based on quaternions. However,assuming the real angles and angular velocities will not deviate much about the desired ones the behaviour of both systems is rather similar.
Basiccoordinateframetransformations:For the 2-axis gimbal problem three different coordinate frames are used.The base or platform frame,the outer gimbal frame and the inner gimbal frame. All frames are related by transformation matrices,in this case,the sum of a translational and a rotational matrix. Fig. 2 shows the gimbal structure with the different coordinate frames axis depicted in different colours along with their angular relations [7] .
The relation between the platform frame and the outer gimbal frame is expressed by the sum of two matrices. One. RθP0,represents a rotational transformation and the other one,TPO,represents a translational transformation.

Coordinates in Outer Frame = [ RθPO+ Tpo ] . Coordinates in Planiform Frame the same situation happens for the relations between outer and inner gimbal frame where now RθPIrepresents the rotational transformation and TOIrepresents the translational transformation.

Coordinates in Inner Frame = [ RθPI+ TOI] . Coordinates in Platform Frame because our interest is focused on angular velocities,angular accelerations and angles,we can drop the Translational Matrix that has no influence on how the rate vector of one coordinate frame relates with the other. The outer frame rotates around the z-axis and the inner frame around the y-axis so the anglesθPOandθOIwill not stay fixed but will vary in time. The derivative ofθPOdepends on the different velocities between the platform coordinate frame angular velocity (ωP) and the outer coordinate frame angular velocity (ωO) around the z-axis. It is clear from here thatωOcannot be solved explicitly v.1thout taking into account the forces that produce the relative angular velocity between both frames of reference. The same goes for the inner coordinate frame angular velocity (ωI),but in this case between the outer coordinate frame angular velocity (ωO) and the inner coordinate frame angular velocity (ωO) around the y-axis.As mention above the derivative ofθPOrepresented by equations is

Creating the auxiliary matrix

We can get the relation between the platform frame and the outer gimbal frame as

following an identical procedure

And the relation between the outer frame and the inner gimbal frame is

Finally,we need to calculate the angular acceleration rate of the inner frame. These angular acceleration rates will be used in the next section to develop the gimbal dynamics model. This model will be the basis for the rest of the work and will be used to perform the simulations and to analyse different controllers. Therefore,differentiating Eq. (13) we get,

Where,

4.2. Euler’s moment equations
The gimbal dynamics model can be derived from the torque relationships about the inner and outer gimbal body axes based on rigid body dynamics.
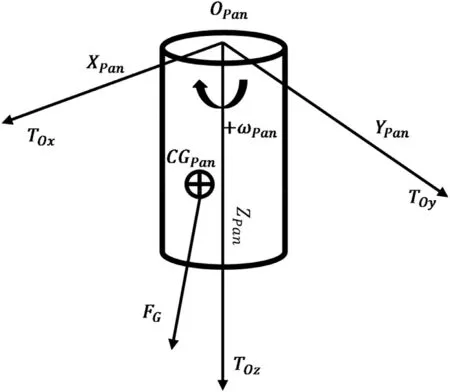
Fig. 3. Gimbal free body diagram for Inner axis reaction torques on the external joint axis of rotation.
The Euler’s moment equations are

Where M represents the applied moment and h is the angular momentum. The subscript I express a derivate in the inertial frame and the subscript B a devote in the object frame. If the principal axes of inertia coincide with the coordinate frame,which is our case,performing the vector product give us three scalar equations

The following equations that will be used to develop the gimbal dynamics model follow closely the treatment given in with major differences in the model of the friction.
4.3. Equations of motion
In this section,the gimbal equations of motion are summarized. They have been derived from the Euler moment equations for general rigid body 6 degrees of freedom motion by means of the application of the kinematic constraints to define the joint axes. Euler’s equation circumstances that the summation of the moments,,about a body is equal to the rate of change of its angular momentum,InerTial.

The gimbal is broken up into two autonomous forms,Pan and Tilt and is characterized by the free body diagram illustrations presented in Figs. 3 and 4 Gimbal free body diagrams.


Fig. 4. Gimbal free body diagram in which T Ix , T Iz are torques exerted by the inner/tilt axis onto the outer/pan axis.

Assuming alignment of both sets of body axes principal inertia axes the gimbal moment equations can be written in matrix form. Inner/Tilt axes:
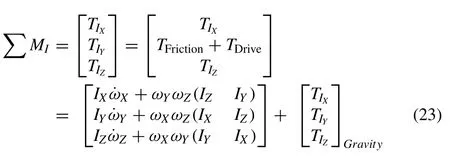
Solving for the unknowns the equations of motion of the Inner/Tilt axes results in the following:

Moment equations for the Outer/Pan axis written in matrix form are shown below:

Note that the inner axis reaction torques are accounted for in the [T]IOterm. Solving for the unknowns the equation of motions of the Outer/Pan axis results in the following:

TOx,TOyare reaction torques of the gimbal onto the base.For the scope of this project,it is assumed that the inertia of the base,or host aircraft,is much larger than the gimbal allowing us to ignore any base disturbances caused by the gimbal’s reaction torques. The termTGravityrepresents the mass imbalance torques of the gimbal due to the force of gravity. To simplify the gimbal dynamics,it is assumed that centre of gravity of the inner (tilt) axis lies on the inner axis of rotation and that the centre of gravity of the outer axis lies on the outer axis of rotation [8-10] . This assumption requires that the real gimbal system be balanced with counterweights.Applying the CG constraint to the outer axis requires the inner axis CG to lie not only on its axis of rotation but also along the outer axis of rotation. This implies that these two rotational axes intersect putting an additional constraint on the mechanical design. In carefully aligning the CG locations,the torque induced from gravity can be cancelled out significantly simplifying the dynamics and the control system complexity.
4.4. Inner gimbal dynamics
We will begin analysing the dynamics of the inner gimbal.The sum of the kinematics torques about the inner gimbal is

With
TeI: Elevation stabilization control torque.
TfI: Friction torque about the y-axis
rGGIx,τGGly,τGGIz: Gravity gradient torques about each gimbal axis.
TOIx,TOIz: Torques exerted by cuter gimbal on inner gimbal
The elevation stabilization torque TeI-produced by the motor attached to the y-axis of the inner gimbal -consists of two parts. One has the main function of cancelling the disturbances and therefore,to nullify the angular velocityωIythis will be called TeIωand the other has to control the inner gimbal in order to move up to the desired angle,this part will be called TeIθ. The gimbal-motor system has been built in a way to avoid or minimize all nonlinear of behaviour of friction. It has proved to be a realistic assumption to consider the friction as the sum of a linear component,dependant on the relative angular velocity between the inner and outer gimbal y-axis and a nonlinear component called coulomb friction. The linear component of the friction is proportional to the viscous friction coefficient Klf. The Coulomb friction has a constant value,Refand its direction depends on the sign of. This constant can only be determined empirically [11-13].
The outer gimbal will exert torques around the x and zaxis of the inner gimbal. This torque will be necessary to produce the same angular displacement experienced by the outer gimbal due to the fixed relationship between these axes.
One important external moment is the gravitational moment. An asymmetric body subject to a gravitational field will experience a torque tending to align the axis of least inertia with the field direction. For the following development,we assume that the gimbal is at a distance R0from the Earth’s centre of mass. The reference frame will be defined as follows: the origin of the reference frame moves with the centre of mass (cm) of the inner gimbal. The zR-axis points towards the cm of the earth (the subscript “R” stands for reference).The xR-axis is perpendicular to the zRaxis in the direction of unmanned vehicles velocity. The YRaxis is perpendicular to both,the ZRand xR-axis. The aircraft’s axis frame is defined by xB,yBand zBwhere each axis coincides with the inertia axes (the subscript stands “B” denotes body) [14 ,15] .
The Euler angles are defined as the rotational angles about the body axes as follows:φ,about the xB-axis;φ,about the yB-axis; andψ,about the zB-axis,assuming an initial alignment between the reference and the body frame.
The gravity gradient vector is defined as

The force exerted on a mass element due to gravity is

Wherer=R+ρis the distance from the earth’s centre of mass to the mass dm. Sincep<R0the moment about the centre of mass of the body becomes

whereρis the radius vector from the body’s centre of mass to a generic mass elementdm.
Because ofp<<R0. 1/r3approximated as

Integration of Eq. (32) over the entire body of mass,together with Eq. (33) ,leads to

After calculating the scalar and vector products we get the final results

These are the gravity gradient movement components of G.The gravity moment vector G should be expressed in terms of the angles of the inner gimbal system of reference. This can be achieved by the body axes angular rates relative to the reference frame together with knowledge of the initial conditions of the Euler angles relative to the reference frame[16 ,17] .
If we combine Eqs. (17 )-( 19 ) and (27 )-( 29 ) and replace the general inertia matrices and angular velocities by the inertia matrices and the angular velocities of the inner frame,we get
The first and third equation of having no practical use since the gimbal rotation around the x and z-axis are will depend completely on the rotation of the outer gimbal. Therefore,the torques will be the necessary ones to accomplish this. This leaves us with the second equation which contains the derivative of one of the variables to be controlled (ωIy). Expanding the terms of the friction torques and the control torques we get

The goal is to control the elevation axis -inner gimbal yaxis -and the cross-elevation axis-inner gimbalz-axis. Therefore,the variables to be controlled areωIyandωIz. Because we do not have direct control over the cross-elevation axis we have to do it indirectly through the azimuth axis -outer gimbal z-axis.
Using the relations stated in Eqs. (6) and (14) we get,

The first three equations give us

We also know that

Using the relations stated in Eqs. (46 ) and ( 47 ) it is possible to represent Eq. (41 ) in terms of the controlled variables and the base disturbances.
Eq. (48 ) is useful to simulate and model the real system but for control purposes,it is more practical to use the information of the angular velocities directly on outer gimbal axis instead of getting the data from the base. A second way to represent these dynamics is in terms of the controlled variables and the outer gimbal angular velocities as they will be seen by the controller. Later on,it will be shown that the outer gimbal angular velocities will not be known exactly due to sensor dynamics and noise measurements. Representing Eq. (48 ) in terms of the outer gimbal angular velocities give us,

It can be seen that using the outer gimbal angular velocities not only simplifies the model but reduce the number of sensors used,
4.5. Outer gimbals dynamics
We use the Euler’s moment equations to get the rigid body torque dynamics for the outer gimbal. The total torque vector about the outer gimbal axis is

Expanding this equation,we get the sum of the kinematics torques about each axis of the outer gimbal
[Mlx(t)]0,[Mly(t)]0,[MIz(t)]Qare the torque’s matrices of the inner gimbal referred to the outer gimbal frame. As in the previous case we have,
Taz: Azimuth stabilization control torque.
Tfo: Friction torque about the z-axis.
TGGOx,TGGOy,TGGOz: Gravity gradient torques about each outer gimbal axes.
TBOx,TBOy: Torques exerted by the base on outer gimbal.
In the same manner as before. the azimuth stabilization torque Taz-produced by the motor attached to the z-axis of the outer gimbal-consists of two parts: disturbance cancellation and pointing. Because stabilization is required about the inner z-axis. called cross elevation axis,Tazis used to indirectly control the angular velocityωIz. This fact poses a difficult problem due to the high nonlinearities that appear in the dynamics of & the system [18] .
As before,the friction can be divided into viscous friction,proportional toand KOf. and the Coulomb friction,that has a constant magnitude equal to Kfcand whose direction depends on the sign of.
The Outer and Inner torque vectors are defined as

Applying the Euler’s moment equation to both vectors
Combining with Eq. (54 ) we can derive the rigid body torque dynamics for the outer gimbal body as

From Eq. (58) and the symmetry property which states thatwe can expand the first term of the right hand,

With this result,Eq. (58 ) can be expressed as,

As we are interested in the cross-elevation axis we shall consider only the third element of the vector shown in Eq.(60) . Solving for the first term of the left hand we have,
In this case []3denotes the third element of the vector. As we can see below,the third element of the last term of the right hand is equal to zero.

After replacing the results obtained above for the crosselevation axis dynamics equation we get

From Eq. (14 ) the angular acceleration about the inner xaxis can be obtained.
Substituting into 64,expanding the cross products terms and substituting the kinematics torques leads to,

This equation could be expanded further to represent the whole dynamics only in terms of the controlled variables and the base disturbances [19 ,20] .
Amplifiedinnergimbaldynamics: All variables are measured by s ɛ nsors which have their own dynamics plus noise added at the output. Therefore,the actual variables cannot be known exactly. To deal with this,an augmented state-space representation of the system is done. From Eq. (3) we know that the dynamics of the sensors are described as

Were the inputωmis the angular velocity to be measured. If we use a state-space representation
Now we are ready to combine Eqs. (67) and (49) to get a state-space representation of the inner gimbal dynamics including the sensor dynamics. This representation of the complete system will be used afterwards to develop the observers and controllers for the system,


The gimbal used for this project has a special property: its ax ɛ s of inertia are symmetrical. We can see that due to this symmetry the last term in the state equation will be cancelled.Also due to this symmetry,the gravity gradient torque will disappear (see Eqs. (35) -( 37 )). Furthermost,this representation is useful for adding measurement noise at the output of the gyroscopes. simplifying the state equation and adding the measurement noise we obtain,

Where e is the measurement noise of the sensor. This noise is assumed to be white noise with covariance Ecov.

It can be seen from the state-space equation that cancelling the nonlinear term would leave as with a near system and therefore able to apply a controller for LTI systems. e.g. PID controller [21] . Two important obstacles are th ɛ fact that the paranιelerKefis unknown and need to be estimated in realtime,and as stated before that we do not have the precise values of the variablesωIyandωOy. lt is clear the necessity to develop an observer to be able to apply negative feedback to counteract the torque produced by this term. This observer will be developed in the following section [22] .
4.6. An overview of Kalman filtering
The Kalman filter is essentially a set of mathematical equations that implement a predictor-corrector type estimator that is optimal in the sense that it minimizes the estimated error covariance when some presumed conditions are met. Although not all the required conditions are met,because the system is only an approximation to the real nonlinear system,the Kalman filter has proven to be flexible enough to be implemented [23 ,24] .
The Kalman filter estimates a process by using a form of feedback control: the filter estimates the process state at some time and then obtains feedback in the form of (noisy)measurements. As such,the equations for the Kalman filter fall into two groups: time update equations and measurement update equations. The time update equations are responsible for projecting forward (in time) the current state and error covariance estimates to obtain the a priori estimates for the next time step. The measurement update equations are responsible for the feedback-i.e. for incorporating a new measurement into the a priori estimate to obtain an improved a posteriori estimate [25] . A summary of the main equations is shown below,the estimated error covariance to be minimized is defined as,

The first step is the time update calculations. The equations used are,

For the measurement update,we need first to compute the Kalman gain and then to correct the estimated states and to compute the new covariance matrix.

It is quite common for most applications to use the steadystate Kalman gain instead of the time-varying gain.
ExtendedKalmanfilter: To overcome the few drawbacks of the steady-state an alternative method is proposed. Instead of using a linear approximation compatible with the traditional Kalman filter the extended Kalman filter for the nonlinear system will be developed. A Kalman filter that linearizes about the current mean and covariance is referred to as an extended Kalman filter. or EKF. In something alike to a Taylor series,we can linearize the estimation around the current estimate using the partial derivatives of the process and measurement functions to compute estimates even in the face of non-linear relationships [26-27] . The nonlinear system will be represented as

As same as with the discrete Kalman filter,the EKF process is divided into two steps: time update and measurement update. The time update equation,for estimation of Xkbased on the estimation of Xk-1,comes straight from Eqs. (81) and 82 Consequently,

Before presenting the whole set of equations we need to define the Jacobian matrices of the partial derivatives of f and c with respect to X,w,and e. These matrices will be used later in a similar way to how matrices Adand Cdwhere used in the discrete Kalman filter.

We are now ready to define properly the lime update equations

and the measurement update equations

The system in Eq. (71) was discretized considering the unknown parameter Kcas a variable of the system and using the approximation

where T is the sampling period,For T small enough,this discretization method is almost equivalent to the zero-orderhold method. The Jacobian matrices of this discretized system are,

Fig. 5. Simulink model of three-axis gimbal circuit.

The parameters g11,g22,g33,g44will be used in the design process to tune how the noise w affect each of the states of the system. Using the matrices from Eqs. (94 )-( 97 ) and the Eqs. (88 )-( 92 ),an S-function can be evaluated to perform the Extended Kalman Filter algorithm [28-30] .
5. Gimbal and motor control
The idea of driving the venture is to give the degree of freedom (DOF) for three axes (x,y,and z) to the gimbal system. What’s more,to get that sort of adaptability to the axes the circuit needs to get joined with moving components,for example,brushless DC motor to give the 360 degrees of freedom (DOF) for three axes (x,y,and z) to the gimbal system.Therefore three 3 dc motor would be executed to get a gimbal system. From the Figure it very well may comprehend that pin3(D),pin5(D),and pin6(D) are utilized for the information signal for the three motors of the gimbal,on the grounds that the engines of the circuit is intended to get fluctuating I/p signals at consistently during the running method of gimbal circuit,and digital pin 3,5,6 of Arduino ready to produce pulse-width modulated (PWM) signals. The fundamental goal is to assess the framework execution dependent on the sensor selection; therefore,the sensor is modelled first [31] .
While IMUs comprise of accelerators and rate gyros,the modelling performed is just reliant on the angular positioning of the gimbal framework and is accordingly the main piece of the inertial sensor that is modelled as shown in Fig. 5 .And then an inertial measurement unit (IMU) sensor block is attached to the circuit just with gravitational power capacity of it just to detect the unseemly arrangement of the equipment circuit and give the error input to the Arduino so the servo system can keep up the axes according to prerequisite[32 ,33] . Furthermore,that is the means by which the 3-axis camera gimbal circuit will be in working condition. The noisy signals or the distortions will be eliminated through Kalman filtering in the control unit which is pre-programmed with this feature of noise elimination. Also,when the structure of the control framework for the camera gimbal is done,it will be started in the equipment part to check whether its working or not. On the off chance that all the equipment segments and control procedure is fitting for one another then it will demonstrate the output in the screen for each engine for every axis. What’s more,from the output qualities of the motors,it will be straightforward the effectiveness,deferral and position of motors. What’s more,it very well may be controlled according to the prerequisite of the application [34] .
5.1. Hardware attachments
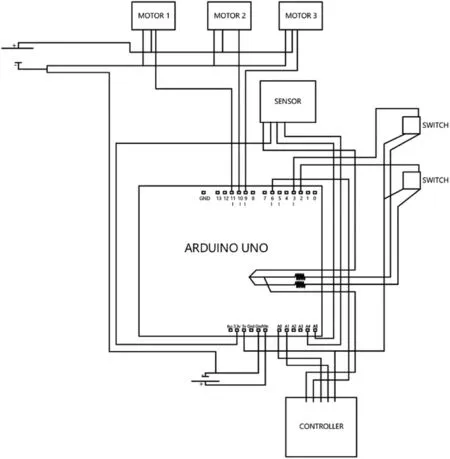
Fig. 6. Circuit diagram of the experiment.
The dynamic adjustment of payload or equipment installed in gimbal is creating for quite a while for capturing stable images or data stats for various purposes. These days it turns out to be entirely adaptable to control the gimbal movement remotely. The point of this analysis or venture is to make another control framework to balance out the 3-axis gimbal camera position in MATLAB Simulink.
To get this control system,the boosted control hypothesis for 3-axis developments is required with a smaller scale controller which is an Arduino UNO for this investigation,and to plan a motor driving control rationale for 3 axis development [35] . And,the separating of undesirable sign will be executed in the Arduino. From Fig. 6 ,the schematic diagram of the control system,a general thought can be gotten from the trial. From the Figure it tends to be comprehend that pin3(D),pin5(D),and pin6(D) are utilized for the information signal for the three motors of the gimbal,on the grounds that the motors of the circuit is intended to get fluctuating I/p signals at consistently during the running method of gimbal circuit,and digital pin 3,5,6 of Arduino ready to produce pulse-width modulated (PWM) signals [36] . An inertial measurement unit (motion sensor) (IMU) sensor block is attached to circuit just with gravitational power capacity of it just to detect the unseemly arrangement of the equipment circuit and give the mistake criticism to the Arduino so the servo framework can keep up the axes according to necessity.
Brushless DC motors can create higher torque and unwavering quality. Brushless DC engine can be synchronized with the input signal immediately that is the reason the delay is less over other dc motors. To get ideal proficiency brushless DC motors are utilized in this gimbal circuit. By picking up running and controlling a brushless DC engine structure the investigations of past research papers,the basic components are executed in the re-enactment model.
6. Results and analysis
The most significant piece of the venture is to make the control framework for the gimbal. Since the entire gyroscopic development will be constrained by the control technology which will keep up the strength of the camera gimbal. The higher the effectiveness of the control strategy will be,the deferral would be less for the framework. One other thing ought to be as a primary concern that if the mechanical and other outer loses can be decreased or relieved,the productivity of the camera gimbal would be better. And,that is the means by which the caught photographs or the recordings would be better in quality. The control system has been explained underneath with a square outline.
The full control procedure to make the gimbal circuit stable(appeared in Fig. 7 ),the information was given by the IMU unit is first changed over into a precise dislodging parameter,and from that point forward,the change over information is contrasted and axes misalignment of the gimbal and the error calibration feedback is gained. To get the ideal and proficient output from the IMU sensor and Arduino UNO Kalman filtering is required. In this paper 0.0001 to 0.001 s noise,covariant parameters’ qualities will be talked about. The application on the microcontroller Arduino UNO depends on. For a linear system,the state space condition can be composed as

Fig. 7. Control Strategy of the gimbal circuit.

In Kalman filter,( 98 ) will be converted into;

Here u is the read from gyroscope and A,B are taken subjectively just because of execution. The most essential issue of this venture is the assessed error for the covariance noise. This worth will tell us how much flimsiness is getting by the sensor module. As the Arduino UNO has the broadly useful ATmega microcontroller so the matrix activity needs to change over into the basic numerical condition for the decrease of the multifaceted nature of estimation. Furthermore,that is the manner by which the above conditions would be changed over into rearranged structure given beneath

And Eq. (100) can be written as,

On presentation,tests were taken as an offset the standard for each sensor while the framework was still and level to account static error no doubt in view of temperature affectability,misalignment or diverse different angles for the accelerometer yield speaking to inclination,

Here “a” is the standard speeding up,a(bias) is the balanced increasing speed during initialization,and S is the sensitivity of the sensor. The IMU control the rotational course of motors by the detecting range it has been fabricated with.

Fig. 8. MATLAB simulation with 0.0001 as measurement covariant noise.
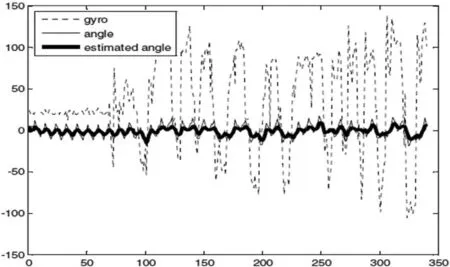
Fig. 9. MATLAB simulation with 0.001 as measurement covariant noise.


Fig. 10. Output curve of a single brushless DC motor(roll) of the gimbal.

Fig. 11. PID controller output for roll axis of a gimbal.
Here Refer to Eq. (104) ,is the foundation of the linear relationship at the o/p side of the sensor. Ф is the roll rate of gyroscope,and del.t is the sampling rate. This is the calculation to get the mandatory information for each axes of the gimbal. And,the sensor had taken the most significant part to start these kinds of investigations. After all it is the sensor for which the entire gyroscopic developments have been conceivable to execute as a team with the previously mentioned conditions on the grounds that without the assistance of sensors the camera gimbal strength is difficult to acquire.The camera gimbal direction can be controlled in two unique ways,for example,the controller (wi-fi module or Bluetooth)of the circuit can move the heading of the camera according to necessity or the gimbal can naturally keep up its camera position which will be given pre-customized in the MATLAB reproduction. At the outcome segment of the recreation,just x(roll) axis’ output signature plot has appeared in the output.
At first the simulation results for the estimated angle from the Kalman filter with 0.0001( Fig. 8 ) and 0.001( Fig. 9 ) as of measurement covariance noise.
And then the output of one gimbal motor has been taken out to show the output curve ( Fig. 10 ) of the system and how it acts as per the inclination of the hardware system and how the curve varies with angular displacement. The output curve can be obtained with more accuracy if the IMU sensor is used with multiple functions for the feedback to the system which is shown in Fig. 11 . As the roll axis diagram is obtained after receiving the feedback from a PID controller.
From the study of previous research papers on the topic,it can be understood that the gimbal stability had been a primary topic to emphasize and develop for UUVs and AUVs for better surveillance or for any other purposes. That is why this project has been initiated for gimbal stability. And from the simulation results,it can be easily understood that this process is applicable and efficient for further study in this topic. Moreover,from the output curve or the movement of the motor can be read from the simulation result at it can be changed as per user’s requirement.
7. Conclusions
The undertaking work contained reports a couple of basic issues in the field of gimbal adjustment. Another way to deal with inside steadiness research utilizing a gimbal has appeared in this paper. The new technique comprises of a Simulink block and thusly gives us an approx. yield.Assessment of the framework,after the investigations of past research papers on the gimbal which depend on the inertial estimation unit information,and just gives us a plan to the inward assessment of the gimbal’s security. The normal improvement of the inward recreation relies upon the self-ruling mode and gimbal quality. From the assistance of various past examines on the gimbal circuit and its strength,the rationale of adjustment in a genuine domain is to set up the reachable adjustment precision. With the referenced test,the information extends from 2.56 ° and 1.97 °,and a standard deviation from 0.46 °and 0.36 °for pitch and move parameters is gotten. The outside direction dependability is improved 3 or multiple times in contrast with the exploratory tests,contingent upon the states of the independent submerged vehicle.Considering the way that a gimbal is least spending device and that utilized innovation is quickly improving this target will become too soon. On the off chance that this kind of recently gimbal controlling thought is started in the communal intelligence field then we can get a performing multiple tasks framework,that is by utilizing MATLAB,the controlling of the gimbal,depiction formulating and submerged control agenda and so on can be set up with lesser inconveniences.Furthermore,this could be introduced in different enormous and little extends from image or measurements taking to autonomous submerged observation vehicles. The bore of this examination has been under the correlation with the hit and preliminary strategy which has been explained in the paper.
 Journal of Ocean Engineering and Science2020年2期
Journal of Ocean Engineering and Science2020年2期
- Journal of Ocean Engineering and Science的其它文章
- Analytic solutions of the generalized water wave dynamical equations based on time-space symmetric differential operator
- Solitary wave solutions for the variable-coefficient coupled nonlinear Schrödinger equations and Davey-Stewartson system using modified sine-Gordon equation method
- Flow past a bluff body subjected to lower subcritical Reynolds number
- Comparison of computational fluid dynamics and fluid structure interaction models for the performance prediction of tidal current turbines
- Mathematical modelling and analysis of plastic waste pollution and its impact on the ocean surface
- An assessment of oil spill detection using Sentinel 1 SAR-C images