
四阶电力系统混沌分析与新型滑模控制
2020-06-18 00:30许丹莹
华中师范大学学报(自然科学版) 2020年3期
方 洁,许丹莹,方 娜,邓 玮
(郑州轻工业大学电气信息工程学院,郑州 450002)
混沌是非线性系统特有的运动形式,具有内在随机性、分形性质、敏感依赖性等特点,在不同的初始值和系统参数下会产生多种不同的混沌运动状态,如多种周期运动共存[1]、混沌与周期运动共存[2]、多吸引子共存[3-4]等.电力系统作为一种典型的多变量、强耦合非线性系统,其参数变动、时滞或外部扰动等都会使系统产生丰富的动力学行为,且当变动量满足一定条件,例如为持续性周期性负荷扰动时,就会产生无规则的、突发性的混沌现象[5-6].在电网的运行过程中,混沌现象会引起过电压、过电流,严重时会诱发电网解列、造成电压崩溃,严重影响电网的安全稳定运行[7-8].随着电网的不断互联,电力系统的运行环境变得更加复杂,电网中局部的混沌有可能演变为系统整体性混沌,在临界条件下,电力系统有可能从偏离平衡状态直接发展为整个系统的崩溃[9-10].
当前,我国电力工业和国民经济的飞速发展对电网的安全、可靠运行提出了更加严格的要求,电力系统的混沌控制已经成为国内外学者的研究热点,目前已有的混沌控制的方法有自适应控制[11]、反馈控制[12]、滑模控制[13-14]等,其中,滑模控制具有响应迅速、对扰动敏感性低、实现简单等优点,因而比其他控制方法更多地应用于电力系统的混沌控制中.文献[15]通过对具有两个不确定参数的互联电力系统混沌行为的研究,设计了基于模糊控制器的滑模控制,解决了互联混沌电力系统的控制问题;文献[16]在确认互联电力系统存在混沌现象的基础上,设计了一种反演滑模变控制法,有效地控制了系统的混沌振荡,并具有较强的鲁棒性.
在对电力系统进行滑模控制时,传统的方法是选用符号函数作为滑动控制律,然而,由于符号函数本身的跳跃性,极易导致控制过程中出现严重的抖振现象.为了避免抖振现象对电力系统造成二次破坏,文献[17]在控制过程中选取双曲函数作为滑动控制律,文献[18]采用继电特性函数代替符号函数,文献[19]运用“小误差大增益,大误差小增益”的工程特性,建立了一种特殊免疫函数,这些措施均在不同程度上减轻了滑模控制中的抖振现象.
本文在以上研究的基础上,基于含有扰动项的四阶电力系统模型,首先使用相图、Lyapunov指数谱及分叉图分析了参数变化对系统特性的影响,确认了使系统产生混沌现象的参数范围.然后,将一种新的非线性光滑函数作为滑模控制的滑动控制律,采用反演滑模控制方法对处于混沌运动的电力系统进行控制.最后,通过MATLAB仿真证实了所设计控制器的有效性.
1 含扰动的四阶电力系统模型
电力系统是由发电机、变电站、输配电线路和用电负荷组成的复杂大系统,根据文献[18]可知,含扰动项的四阶电力系统模型如下:
(1)
其中,
V=
式中,δ为发电机功角,ω是发电机角频率,E′为暂态电压,Efdr为励磁输入电压,V0是母线电压,V为发电机端电压,Vref为母线参考电压,Efd为励磁电压,Efd0为励磁参考电压,x,xd和x′d分别为线路、发电机及发电机暂态电抗,H为等值转动惯量,TA是励磁时间常数,d是阻尼因子,Pm是机械功率,KA为励磁调节增益,-Pecos(2πfet)sinδ表示电磁功率扰动项,Pe为扰动幅值,fe为扰动频率;Plsin(2πflt)表示负载功率扰动项,Pl为扰动幅值,fl为扰动频率.
当参数d=4,Pm=1,KA=130时,观察δ、ω、E′以及Efdr的运动状态,从图1所示的相图可以直观地看出系统存在典型的混沌吸引子,处于混沌运动状态.
2 混沌特性分析
2.1 耗散性和吸引子的存在性
对于该四阶电力系统(1),系统的能量函数为
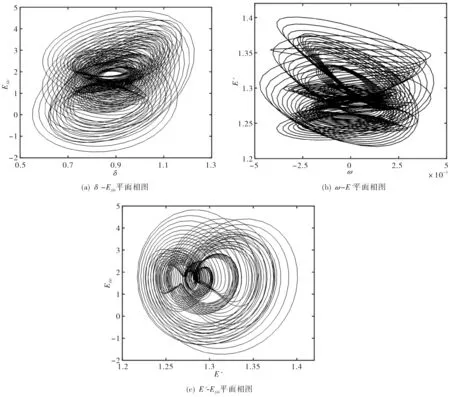
图1 四阶电力系统混沌状态相图Fig.1 State phase diagram of fourth-dimensional power system
(2)
要想确保系统(1)是耗散的,必须满足式(2)小于0,且以以下指数形式收敛:
(3)
模型中系统参数常用值如表1所示(表中各参数均为标幺值)[20].
2.2 参数变化对系统的影响性
随着参数的改变,系统平衡点的稳定性将会发
生变化,从而使系统处于不同的状态,为了更直观的体现参数d、Pm及KA变化对含扰动的电力系统的影响,令扰动项参数Pe=0.12,fe=0.2,Pl=0.08,fl=0.2,将[1.064,0,1.338,1.907]作为初始值代入分析,结果如下.
1) 固定参数d=4,Pm=1,调整KA,KA∈(70,170)时的Lyapunov指数谱如图2(a)所示,KA∈(100,140)时的分叉图如图2(b)所示.从图中可以看出,当KA∈(70,83.671)时,系统的Lyapunov指数均为负值,系统状态稳定;当KA∈(83.671,108.578)时,系统的Lyapunov指数有一个正值,三个负值,当KA∈(108.578,130.538)时,系统的Lyapunov指数有两个正值,两个负值,在这些阶段,系统出现混沌运动;当KA∈(130.538,170)时,系统的Lyapunov指数有一个正值,三个负值,此时最大Lyapunov指数值较高,初始轨道相差较大.

表1 系统参数常用值Tab.1 Common values of system parameters

图2 系统随KA变化的Lyapunov指数谱和分叉图Fig.2 Lyapunov exponent spectrum and bifurcation diagram of system with the variation of KAvalue
2)固定参数Pm=1,KA=128,调整d,d∈(0,5)时的Lyapunov指数谱如图3(a)所示,d∈(3.9,4.5)时对应的分叉图如图3(b)所示.从图中可以看出,始终存在Lyapunov指数大于0,即系统一直处于混沌运动状态;当d∈(3.543,4.412)时,系统的Lyapunov指数有两个正值,两个负值,d∈(3.543,4.051)时的最大Lyapunov指数较高,初始轨道相差较大.
3)固定参数d=4.07,KA=128,调整Pm,Pm∈(0.5,2)时的Lyapunov指数谱如图4(a)所示,Pm∈(0.95,1.05)时对应的分叉图如图4(b)所示.从图中可以看出,当Pm∈(0.5,0.924)时,系统的Lyapunov指数均为负值,系统状态稳定;当Pm∈(0.924,1.184)时,系统的Lyapunov指数有两个正值,两个负值,当Pm∈(1.184,2)时,系统的Lyapunov指数有一个正值,三个负值,在这些阶段,系统均出现混沌运动.

图3 系统随d变化的Lyapunov指数谱和分叉图Fig.3 Lyapunov exponent spectrum and bifurcation diagram of system with the variation of d value

图4 系统随Pm变化的Lyapunov指数谱和分叉图Fig.4 Lyapunov exponent spectrum and bifurcation diagram of system with the variation of Pmvalue
3 混沌行为的抑制
3.1 控制器设计及稳定性分析
对于模型(1),以功角δ作为控制目标,添加控制器u后,得到受控系统(4).
(4)
假设1系统扰动是有界的.记电磁功率扰动项-Pecos(2πfet)sinδ为-Δe(t),负载功率扰动项Plsin(2πflt)为Δl(t),即存在正常数m,使得电磁功率扰动项-Δe(t)≤m;存在正常数n,使得负载功率扰动项Δl(t)≤n.
定理1对任意给定的目标函数r(t),如果假设1成立,则在控制器(5)的作用下,系统(1)和目标函数r(t)能够实现同步,系统(1)的混沌行为被控制.
(5)
证明定义位置误差
e1=δ-r,
(6)
对式(6)求导并将式(4)代入得:
(7)
取第一个Lyapunov函数为
(8)
对(8)求导并将式(7)代入得到
(9)
令
(10)
将式(10)代入式(9)得到
(11)
取第二个Lyapunov函数为
(12)
对式(12)求导并将式(4)、式(10)、式(11)代入得:
(13)
将控制器(5)代入式(13)得:

(14)
(15)
由假设1可得,-Δe(t)|≤m;Δl(t)|≤n,于是有

2πf0[(m+n)e2|-k1h(s)|e2|]≤
2πf0[(m+n)e2|-k1h(s)|e2|].
(16)
2πf0>0恒成立,故当k1h(s)|≥m+n时,可使得式(15)成立.

3.2 数值仿真
由上述混沌特性分析可知,当初始值为[1.064,0,1.338,1.907],系统参数d=4.07,Pm=1.03,KA=128,扰动项参数Pe=0.12,fe=0.2,Pl=0.08,fl=0.2时,系统处于混沌状态.此时,选择控制器参数k0=5,k1=5,τ=200对系统进行控制.
令目标函数r(t)=0,功角δ的状态随时间的变化的曲线如图5(a)所示,功角δ的状态与参考信号之间的误差变量e1随时间变化的曲线如图5(b)所示,此时,控制器u的时序曲线如图5(c)所示.
令目标函数r(t)=1.5-0.2cost,调整扰动项参数为Pe=0.1,fe=0.2,Pl=0.1,fl=0.2,其余参数不变,功角δ的状态随时间的变化的曲线如图6(a)所示,功角δ的状态与参考信号之间的误差变量e1随时间变化的曲线如图6(b)所示,此时,控制器u的时序曲线如图6(c)所示.
由仿真结果可知,加入控制器后,功角δ可以迅速同步于目标函数r(t)并保持稳定,误差信号经过短时间的振荡后衰减到零,系统几乎没有抖振.
4 结论
本文针对含扰动项的四阶电力系统,利用Lyapunov指数谱及分叉图研究了阻尼因子、机械功率及励磁调节增益变化对系统状态的影响,其中,任意参数的微小变动都可能导致该四阶电力系统进入混沌状态.采用一种新的非线性光滑函数作为滑动控制律进行控制器设计,对系统进行反演滑模控制,选取不同的函数方程作为控制目标,实验仿真结果证明了本文控制方法的有效性.
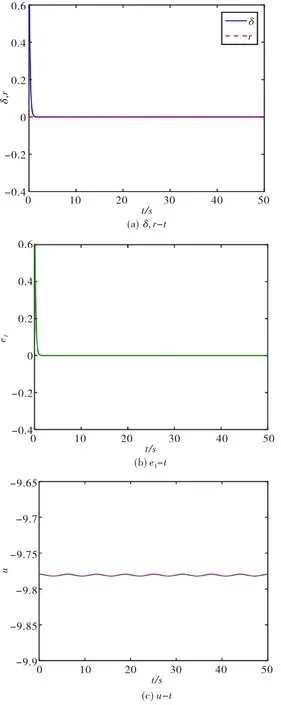
图5 目标函数为r(t)=0的滑模控制效果图Fig.5 Effect diagram of sliding mode control with objective function r(t)=0

图6 目标函数为r(t)=1.5-0.2cos t的滑模控制效果图Fig.6 Effect diagram of sliding mode control with objective function r(t)=1.5-0.2cos t
猜你喜欢
数学物理学报(2022年5期)2022-10-09
上海师范大学学报·自然科学版(2022年3期)2022-07-11
大电机技术(2022年2期)2022-06-05
现代电力(2022年2期)2022-05-23
北京航空航天大学学报(2021年7期)2021-08-13
中山大学学报(自然科学版)(中英文)(2020年6期)2020-12-04
华东师范大学学报(自然科学版)(2020年6期)2020-01-11
数学学习与研究(2018年5期)2018-03-28
北京航空航天大学学报(2017年4期)2017-11-23
北京航空航天大学学报(2016年7期)2016-11-16
