
基于时间延迟的移动目标模拟器的设计与实现
2020-06-17 04:45:06李涛崔岩梅张毅翔欧阳海宁
计测技术 2020年2期
李涛,崔岩梅,张毅翔,欧阳海宁
(航空工业北京长城计量测试技术研究所,北京100095)
0 引言
按照检定规程JJG1074-2012《机动车激光测速仪》的规定,激光测速仪的检定分为模拟检定(实验室检测)和现场检定(道路实测)两部分,即在理想状态下和实际使用状态下考察其计量性能。目前现场检定的手段有多种方式[1-4],例如采用可以实时显示速度的校准车辆进行比较法检测,或者采用切割具有固定间距的两光束的光遮挡法进行速度检测,但现场检定有其局限性,例如实际道路环境、车辆行驶的速度范围、测量是否同步等等,因此需要开展不受环境条件限制的实验室检测。现有的实验室检测基本都是采用时间延迟的方法。目前美国激光技术有限公司(LTI)已研制出了基于单光束的检定装置并将其商品化,用于激光测速仪的实验室检测。为了开发具有自主知识产权的同类检定装置,本文在激光测速仪的校准原理和实现方法上进行了深入的研究,研制出了可以实现任意标准速度的通用移动目标模拟器,可以对激光测速仪进行测速范围和测速误差的校准。
1 单光束激光测速仪校准原理
根据单光束激光测速仪的测速原理,本文提出了移动目标模拟器的校准方法[6-7],即采用精密时间延迟方法产生一组特定的电脉冲信号序列,来模拟一个具有标准速度的运动目标的回波脉冲信号。在激光测速仪校准装置中,移动目标模拟器是最核心的部分。
激光测速仪校准装置由移动目标模拟器、光电转换器和电光转换器组成,其原理框图如图1所示。
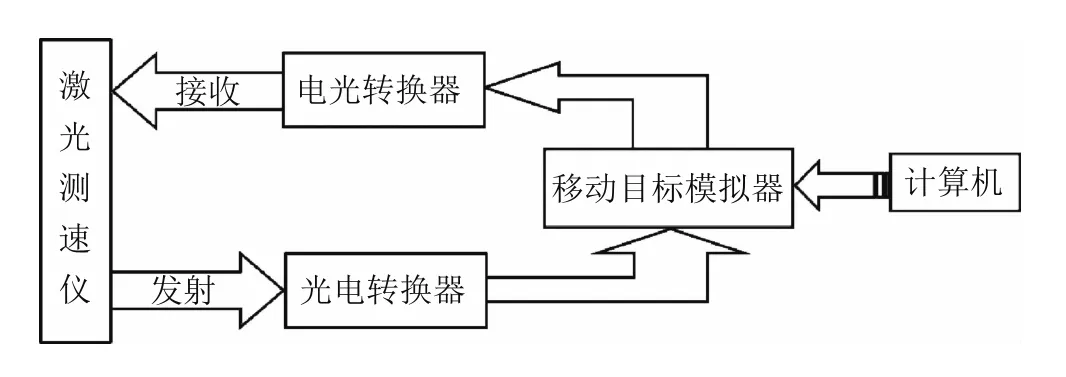
图1 校准装置原理框图
激光测速仪发射的激光脉冲经光电转换器转换为一系列电脉冲,该电脉冲触发移动目标模拟器,输出对应的一系列延时脉冲信号,该信号触发电光转换器发出激光脉冲(模拟激光遇到真实运动目标后的回波脉冲信号),激光测速仪接收到回波信号后,给出运动目标的速度值[8-9]。
假设激光测速仪分别在t1时刻和t2时刻发出激光脉冲,经移动目标模拟器分别延时了Δt1和Δt2,对应的目标距离L1和L2分别用时间和光速(c)的乘积表示,由于该距离是测速仪到目标以及目标返回测速仪的距离之和,即激光光束的往返距离,因此测速仪到目标的实际距离应除以2,即

根据距离(L)、时间(t)、速度(v)三者的关系,移动目标模拟器产生的速度为

激光测速仪的脉冲周期T=t2-t1;Δt表示延时差,即Δt=Δt2-Δt1。因此,在激光测速仪脉冲周期T内的两束光,经移动目标模拟器分别延时后,其延时差对应的速度v为

在使用激光测速仪进行测速时,需要根据多个激光脉冲的回波信号来计算移动目标的速度,所以必须在测速仪的m个脉冲周期mT内产生一系列代表距离变化的回波信号,假设移动目标沿驶离的行驶方向做匀速运动,则与回波信号对应的时间、距离关系如图2所示。图2中,T2-T1=mT。

图2 回波信号的时间、距离关系
因此,对于脉冲激光测速仪的每个脉冲信号,移动目标模拟器需要产生如图3所示的脉冲序列(方向为驶离)。
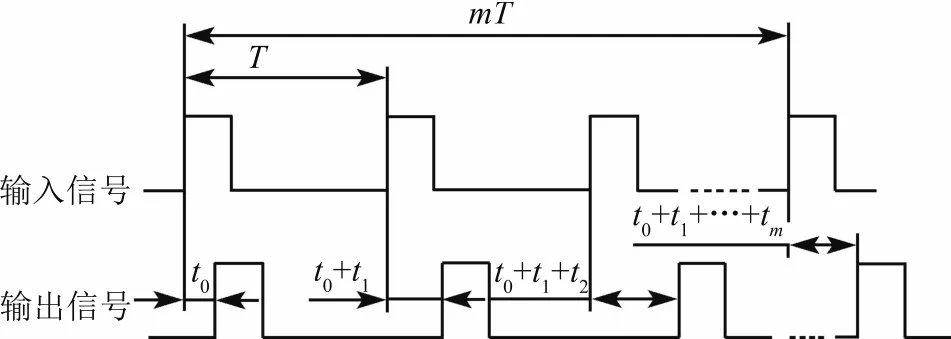
图3 输入脉冲与输出脉冲的时序关系
输入信号为激光测速仪发射的脉冲信号(m个周期为T的脉冲信号),移动目标模拟器输出对应的一组脉冲信号,这组输出信号相对于输入信号的延迟时间依次增大,分别为t0,t0+t1,t0+t1+t2,…,t0+t1+t2+… +tm(m对应输入脉冲的序号),t0是一个固定延迟,代表第一个激光脉冲到移动目标的往返时间。
若移动目标的运动方向为驶近,则移动目标模拟器的输出脉冲依次减小,分别为t0,t0-t1,t0-t1-t2,…,t0-t1-t2-… -tm。
若t1=t2=…=tm,说明这是一个匀速运动的移动目标。
可以看出,移动目标模拟器接收激光测速仪发射的脉冲后,应输出上述特点的回波脉冲信号。
2 移动目标模拟器的设计
为了设计移动目标模拟器,必须知道被测对象(即激光测速仪)的脉冲频率f和脉冲宽度w,这两个数据可以通过示波器或时间间隔计数器准确测出。
还需要知道激光测速仪的触发距离L1和L2,也就是激光测速仪在什么距离范围内可以测出移动物体的速度,这个数据可以从其使用说明书上得到。
有了以上测速仪的基本数据,就可以计算出移动目标模拟器输出各个速度值对应的延时回波脉冲序列时需要的所有参数。
设计总体思路为:首先计算出在整个测速过程中,移动目标模拟器需要输出的延时回波脉冲总数m(即模拟激光测速仪在其触发距离范围内,发射的脉冲遇到移动物体后返回的回波脉冲总数),再根据需要模拟的速度值v以及光速c,计算出相邻两个回波脉冲之间距离变化对应的延时Δt,继而计算出移动目标模拟器的工作数据频率fw,以及在此频率下每个回波脉冲延时Δt对应的脉冲个数n,则移动目标模拟器输出的m个回波脉冲延时对应的脉冲个数分别为n,2n,3n,…,mn,每接收一个激光测速仪发射的脉冲,就触发输出一个延时回波脉冲,直到m个延时回波脉冲输出完毕。
具体计算过程如下:
首先,根据激光测速仪脉冲频率f、触发距离L1和L2(L1<L2)及需要模拟的标准速度v,计算整个测速过程需要输出的延时回波脉冲总数m,即

其次,计算相邻两个回波脉冲之间距离变化对应的延时Δt,得到需要的工作数据频率fw。

如果工作数据频率在移动目标模拟器的频率范围内,就可以采用调频技术实现精密延时,直接设置该工作数据频率为移动目标模拟器的工作数据频率,此时延时的脉冲个数n=1。
如果工作数据频率大于移动目标模拟器的最大工作数据频率,则采用降频的时序细分法,每降(倍降)一次频率,延时回波脉冲总数m增加一倍,经过k次倍降频,直至将频率降至移动目标模拟器的工作数据频率范围以内。

此时每k个延时回波脉冲需要延时的脉冲个数均为n=1。
再根据移动目标模拟器的工作数据频率fw,计算测速起始距离对应的延时脉冲数PL(假设运动方向为驶离,采用距离为L1)。

最后,根据测速仪的脉宽w和移动目标模拟器的工作数据频率,计算回波信号持续的脉冲个数Pw。

3 移动目标模拟器的实现
为了产生上述的延时回波脉冲序列,采用美国TEK公司的数据定时发生器作为硬件电路生成设备来实现移动目标模拟器。
通过编程计算延时回波脉冲序列的各个参数,再控制数据定时发生器的存储分配和电路生成,一次性完整地生成某标准速度值下的回波脉冲序列,并固化在移动目标模拟器中,需要时可以直接调用固化文件并立刻输出。
用数据定时发生器生成回波脉冲序列时,需要考虑其存储深度限制,即block总数和blocksize的长度,除了这两个参数本身有大小限制之外,两者的乘积也有限制。前一个参数block总数,也就是上面计算出来的延时回波脉冲总数m,该值与速度大小成反比,低速时,需要的block总数会成倍增加。为了尽量减小需要的block数量,可以不必在激光测速仪整个测速范围内都生成回波脉冲,只要保证在其测速时间内(比如0.3 s)生成回波脉冲即可,这样就能在低速时大大减少block的数量。后一个参数blocksize的长度中包含了测速起始距离(L1或 L2)对应的延时脉冲数PL和回波信号持续的脉冲个数Pw,如果这两个脉冲个数之和不超过规定的最小模式长度就可以不做处理,如果大于,就需要通过其它方式减小其长度。
生成脉冲序列时,可以按照下面的步骤对数据定时发生器进行设置:由于对单脉冲激光测速仪进行检测时,只需要输出一路脉冲信号,因此首先需要新建一个逻辑通道,并将此逻辑通道与数据定时发生器的硬件通道相关联;下一步就可以建立m个block,并设置每个block的长度均为blocksize,之后就可以对所有的block编辑其数据向量,也就是回波脉冲的波形数据;再设置数据定时发生器的输出电平、频率和触发方式,最后设置输出序列的顺序。
本文通过数据定时发生器的GPIB接口,编制了VC程序对操作面板进行远程控制。图4是标准速度序列产生的程序界面,只需输入测速仪的参数(频率、脉冲宽度、触发距离)和需要产生的速度值、行驶方向,就可计算出延时序列所需的所有参数,并根据这些参数自动生成对应的延时回波脉冲序列,该序列还可以命名存储,以便需要时直接调出并立刻输出。该程序可以任意设置速度值、触发距离和行驶方向。
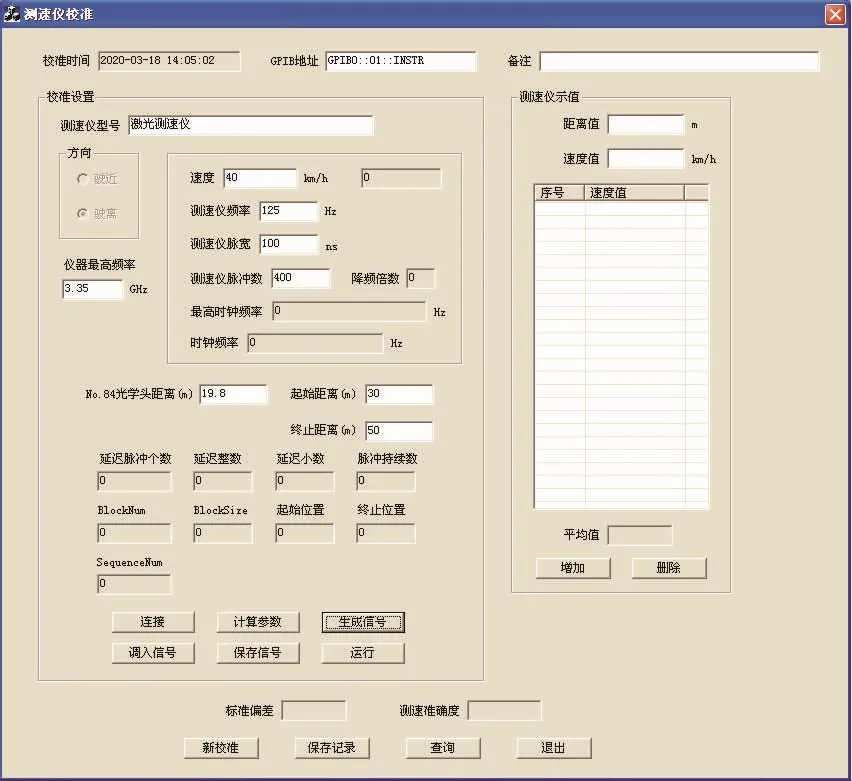
图4 生成脉冲序列的程序界面
4 试验验证
激光测速仪校准装置实物如图5所示,使用该校准装置可以实现激光测速仪测速范围、测速误差的校准。
由激光测速仪发射的脉冲信号经光电转换器转换为电信号,将电信号输入至移动目标模拟器的Trigger In触发端口,通过“输出模块”的CH1通道端口,输出一系列的延时电脉冲信号,激光测速仪接收到电光转换器转换的回波信号后,就可以对激光测速仪进行校准了。

图5 校准装置实物图
为了验证移动目标模拟器生成速度序列的性能,采用TEK公司AFG3252产生的脉冲来代替激光测速仪发射的激光脉冲转换为电脉冲后的信号,用美国STANFORD公司SR620高精度时间间隔计数器对移动目标模拟器产生的脉冲时间间隔进行校准,再根据脉冲频率计算得到对应的速度值,在温度22.5℃、湿度38%条件下对设定的速度值进行连续20次测量,测量结果如表1所示。
由表1可以看出,在20~250 km/h的速度范围内,测量结果的重复性不大于0.1 km/h,偏差量峰峰值不大于0.01 km/h,说明利用数据定时发生器设计的移动目标模拟器具有很好的重复性。
5 结论
本文提出的校准方法是通过时间延迟的方法产生一组电脉冲信号序列,采用TEK公司的数据定时发生器作为硬件电路生成设备,成功模拟了具有任意标准速度的移动目标,最终形成通用移动目标模拟器,并与其它辅助设备共同构建了国内首套激光测速仪检定装置。通过对模拟速度值的测试试验,其速度的偏差量小于0.01 km/h,重复性小于0.1 km/h,验证了该移动目标模拟器可以满足单光束激光测速仪的检定需要。
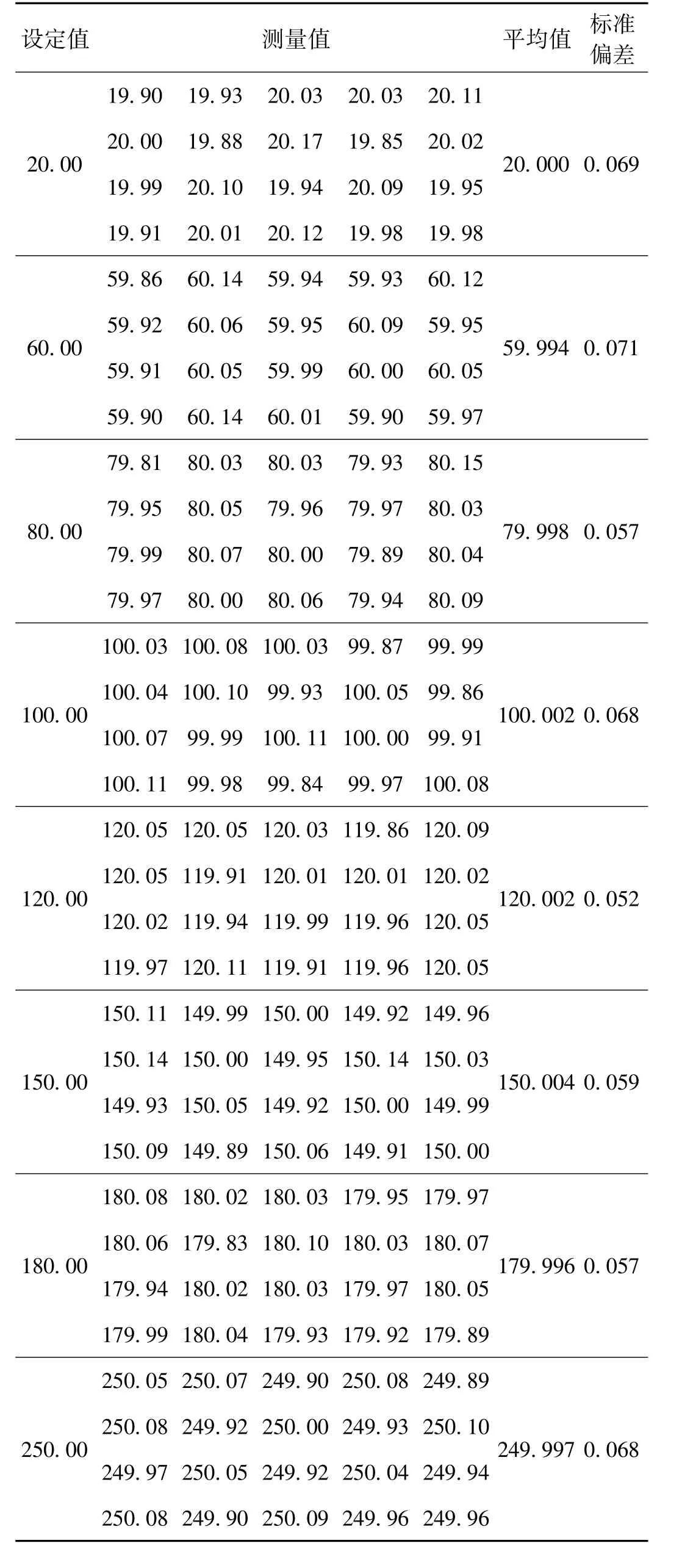
表1 “移动目标模拟器”重复性测量结果 km/h
随着激光测速技术的发展,各种类型的激光测速仪也相继出现,例如安装在龙门架上的双光束激光测速仪和安装在路侧的双光束激光测速仪,虽然它们的测速原理不同,但都可以使用数据定时发生器实现与之对应的移动目标模拟器,开展不同类型脉冲激光测速仪的校准工作。
猜你喜欢
小哥白尼(趣味科学)(2021年6期)2021-11-02 05:23:48
故事作文·高年级(2021年4期)2021-05-06 03:20:04
小哥白尼(神奇星球)(2021年11期)2021-03-08 09:00:18
自动化仪表(2020年10期)2020-11-13 03:31:00
商品与质量(2019年51期)2019-11-28 17:06:10
船舶力学(2015年6期)2015-12-12 08:52:20
装备环境工程(2015年5期)2015-02-28 01:20:24
汽车维护与修理(2014年10期)2014-02-28 12:15:01
机械与电子(2014年2期)2014-02-28 02:07:47
河南科技(2014年23期)2014-02-27 14:19:00
