石墨烯改性尼龙导电织物及其应变传感性能
2020-06-16 03:52李泽钊韩玮屹王潮霞
印染助剂 2020年5期
李泽钊,原 韵,韩玮屹,冯 宏,吴 怡,王 博,王潮霞
(江南大学纺织科学与工程学院,生态纺织教育部重点实验室,江苏无锡 214122)
柔性应变传感器由于轻薄、灵敏度高和可植入等优点被广泛应用在生物、化学、电子、医学检测、人体监测等多个领域。一般柔性传感器的导电材料为金属纳米材料和碳基材料。金属纳米材料拉伸性能差而且成本较高,相比较碳基材料的灵敏度较高[1]、拉伸性好,其中石墨烯的导电性和传感性突出,是制备柔性可穿戴应变传感器的理想材料[2]。将石墨烯附着到织物纤维上,使织物具有透气、服帖、全柔的特点,还具有优良的力学性能和导电性能[3-4],可作为纺织品用拉伸传感器。这种以织物作为基底的石墨烯导电复合材料可实现眨眼、微笑、肌肉运动、吞咽和脉搏等人体行为的信号采集[5],具有非常好的传感应用前景。
将织物充分吸附水溶性氧化石墨烯(GO),再通过原位还原得到的还原氧化石墨烯(RGO)紧密覆盖于织物纤维表面,从而得到柔性导电材料,是制备石墨烯导电织物的常用方法[6-7]。该方法可以使石墨烯在聚合物中均匀分散[8],避免由于石墨烯片层表面没有活性基团致使分散液容易团聚和沉降[9]以及转移到织物上等不稳定问题。本研究采用化学还原法将吸附到可拉伸尼龙基材上的GO 还原成RGO,制得RGO-尼龙导电织物,探究导电性与拉伸应变之间的关系,以及在人体信号监测中的传感性能。
1 实验
1.1 材料与设备
材料:尼龙织物(尼龙70%、氨纶30%),GO 水性浆料(自制),连二亚硫酸钠(保险粉,分析纯,国药集团化学试剂有限公司)。
设备:T18 digital 均质机(德国IKA 公司),inVia拉曼光谱测试仪(英国雷尼绍公司),FE-SEM 场发射扫描电镜(ZEISS SIGMA),SZT-2A 四探针表面电阻测试仪(苏州同创电子有限公司),CHI760E 电化学工作站[上海辰华(CHI)仪器有限公司],SHJ-A 水浴恒温磁力搅拌器(金坛市金南仪器制造有限公司),XS105电子精密天平(METTLER TOLEDO)。
1.2 RGO-尼龙织物的制备
称取GO 浆料20 g,与去离子水以质量比1∶10 配制200 mL 溶液,将尼龙织物浸渍其中1 h,使充分吸收GO,随后转移至5 g/L 保险粉溶液中,并在90 ℃恒温水浴中充分还原,烘干后重复上述实验6 次。剪取5.0 cm×0.9 cm RGO-尼龙织物做导电和传感性能测试。
1.3 测试
利用场发射扫描电镜进行表面形貌观察,并且采用拉曼光谱探究结构特征。
导电性能:每进行一次浸渍-还原后都采用数显万用表测量电阻,测6 次,取平均值,计算出标准差表征RGO 在织物上分散的均匀程度。在RGO-尼龙织物拉伸应变100%的过程中,每增加20%应变,就用同样方法测量电阻值。将织物拉伸50%并重复10 000次,每隔1 000 次用数显万用表和四探针电阻测试仪分别测量6 次电阻和方阻,取平均值,并计算标准差来表征导电性能。
传感性能:将RGO-尼龙织物分别贴附于食指第二关节和手腕背侧,测试者对应做出食指下弯和手腕下弯两种动作,每个动作重复4 次,利用电化学工作站测出RGO-尼龙织物在不同部位动作拉伸时的电流变化曲线。
2 结果与讨论
2.1 表征
由图1a 可知,尼龙织物纤维表面较光滑平整。由图1b 可知,经6 次浸渍-还原后的尼龙织物纤维表面几乎全被包裹上有褶皱、突出状结构的片层物质,说明尼龙织物浸渍在GO 溶液中,带正电荷的尼龙纤维与带负电的GO 相互作用[10],使GO 吸附到纤维上,再经还原过程,GO 中的含氧基团被去除,形成RGO 大面积地负载在纤维表面;但纤维表面有少量的突出部分,这可能是由RGO 团聚造成。
为了进一步验证尼龙织物纤维表面的负载物质为RGO,采用拉曼光谱仪进行检测。从图2可知,与尼龙织物相比,RGO-尼龙织物具有两个明显的特征峰:在1 355 cm-1处RGO 中部分无序结构引起的晶体结构缺陷形成D 峰;在1 590 cm-1处碳原子平面sp2杂化成键所引起的面内振动形成G 峰[11]。两峰强度比ID/IG=1.80,表明被还原的氧化石墨烯虽然去除了部分含氧基团,sp2杂化碳原子增多,但是仍存在一定量的sp3杂化碳原子,因此有一定的结构缺陷[12-14]。同时,尼龙基材的一些特征峰在RGO-尼龙织物的拉曼光谱图上变弱甚至消失,这也说明RGO 确实负载到了尼龙纤维表面。
2.2 RGO-尼龙织物导电性能的影响因素
2.2.1 浸渍-还原次数
考虑到以导电性反映传感性能的RGO-尼龙织物,难以经过一次浸渍-还原就具有较理想的导电性,故进行多次浸渍-还原,使RGO 尽可能多地与尼龙纤维结合,在织物表面形成稳定的导电层,赋予织物较优的导电性。如图3 所示,尼龙织物经过前3 次浸渍-还原,其电阻大幅度减小,这是因为大量的RGO 结合到尼龙纤维表面,形成导电通道。每经过一次浸渍-还原,就会有更多的RGO 负载到纤维表面,RGO 间的相互接触更加紧密,纤维表面的RGO 层也会增多,形成的导电通道体系不局限于二维平面,而是形成一种立体的导电网络结构,宏观上表现为在织物表面形成导电层[15]。在浸渍-还原从第4 次至第6 次的过程中,电阻减小的幅度越来越小,到最终鲜有降低。这是因为纤维上RGO 的负载量越来越多,几乎将纤维完全覆盖,在织物表面形成连续、多层并且稳定的导电层。电阻不再随浸渍-还原次数的增加明显降低,说明织物对RGO 的负载量已近似饱和,其导电性达到较好且稳定的状态。

图3 浸渍-还原次数对RGO-尼龙织物导电性能的影响
2.2.2 应变量
由于该织物纤维是尼龙与氨纶的混纺纤维,本身具有良好的拉伸弹性,有较大的应变量。通过拉伸RGO-尼龙织物使应变量从0%到100%,探究电阻随应变量的变化关系,找到适合传感性能测试的应变量区间,结果如图4所示。

图4 RGO-尼龙织物导电性随拉伸应变量的变化
由图4 可知,当RGO-尼龙织物被拉伸到应变量20%的过程中,电阻随应变量增长近乎呈线性增长。这是因为在横截面积和电阻率不变的情况下,材料的电阻与其长度成正比,在应变量为0%~20%时,织物上导电的RGO 层截面积缩小量极其有限,相较于其应变伸长量可忽略不计,所以电阻与应变量的变化几乎呈线性关系。随着织物继续被拉伸到应变量60%,RGO 层内部可能出现部分断裂,局部RGO 不再有效接触,导电性能下降,致使电阻进一步增大。当应变量从60%增加到100%时,电阻的增长趋势变得极小。这是因为虽然应变量持续增长,但RGO 内部主要的断裂过程已基本结束,只是大部分已经断开的RGO 间隙继续变大,不会再引起电阻突变。总体来看,当应变量在0%~20%时,RGO-尼龙织物的导电体系比较稳定,电阻与应变量间有较稳定的变化关系,受到拉伸时能通过电阻变化展现其较好的传感性能,所以当人体部位的运动在此应变范围时,RGO-尼龙织物能够起到很好的传感检测作用。
2.2.3 拉伸次数
用作传感器的RGO-尼龙织物在投入使用时会受制于其耐用性。由图5 可以看出,经过1 000 次拉伸,RGO-尼龙织物的电阻没有明显增长;电阻和方阻都随拉伸次数的增加呈现总体小幅波动式的增大趋势。说明拉伸1 000 次以下,RGO-尼龙织物的回弹性较好,织物表面负载的RGO 导电层比较稳定,导电性无太大变化,但经过上千次循环拉伸之后,RGO-尼龙织物变疲劳,不能完全回复原长,RGO 间的有效接触减少,形成的导电网络受到破坏,所以织物的导电性能会有所下降。此项测试证明:受制于尼龙织物本身的拉伸疲劳性,拉伸次数较少时,RGO-尼龙织物保持稳定的导电性能,但长时间的多次拉伸会使RGO-尼龙织物的电阻不可避免地增大,影响导电传感性能。
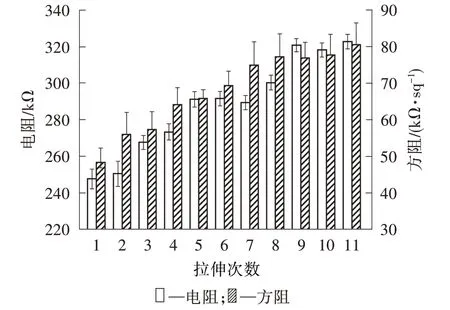
图5 RGO-尼龙织物导电性与拉伸次数的关系
2.3 RGO-尼龙织物的传感性能
RGO-尼龙织物受到拉伸可以体现出明显的导电能力变化,作为传感器贴附于皮肤上,可以通过电化学工作站实时检测导电信号波形变化,有效监测人体部位的运动情况。考虑到手部活动较多,且关节的活动范围适中,将手指和手腕关节作为检测RGO-尼龙织物传感性能的部位。预设恒压为0.5 V,将RGO-尼龙织物接入电路,手指和手腕处的电流信号如图6所示。

图6 RGO-尼龙织物在手指(a)和手腕(b)处的电流信号变化
由图6 可知,当手平放时,RGO-尼龙织物处于自然伸长状态,通过的电流值比较稳定;当手指和手腕分别下弯时,RGO-尼龙织物受拉伸而产生应变,电阻增大,流经的电流值减小,出现了明显的波形变化;当手指和手腕回复到原位时,RGO-尼龙织物也恢复到原长,电阻变小,电流波形又回到初始状态附近。在相同的工作电压下,两组动作采集到的导电信号波形有明显差异,并且在手腕处检测到的电流变化大于手指处,说明当人体不同部位做出相类似的动作时,由于具体关节和肌肉的运动牵拉情况以及动作幅度存在差异,RGO-尼龙织物传感器的应变程度不同,导电性变化也不同。
3 结论
(1)尼龙织物表面负载的RGO 随浸渍-还原次数的增加而增多,织物整体电阻明显减小,导电性显著提升,在浸渍-还原6 次后,织物具有较好的导电性能。RGO-尼龙织物具有良好的拉伸弹性,织物的电阻随着拉伸长度的增长而变大,而在经过上千次拉伸后,织物会因疲劳难以回复原长,致使导电性下降,因此耐用性不高成为制约RGO-尼龙织物传感器难以长期稳定使用的一个因素。
(2)RGO-尼龙织物受人体不同部位运动幅度的影响,导电信号波形变化也有不同,能有效捕捉并识别人体部位的动作。作为一种智能可穿戴材料,RGO-尼龙织物在传感方面有着较大的发展潜力,在与电子信息技术相融合后,可在医学领域用于人体信号的实时监测。
猜你喜欢
材料与冶金学报(2022年2期)2022-08-10
陶瓷学报(2021年5期)2021-11-22
纺织科学研究(2021年7期)2021-08-14
小天使·一年级语数英综合(2020年5期)2020-12-16
小学科学(学生版)(2019年7期)2019-08-01
中国塑料(2016年3期)2016-06-15
浙江大学学报(工学版)(2016年9期)2016-06-05
舰船科学技术(2016年1期)2016-02-27
智能建筑电气技术(2015年5期)2015-12-10
中国塑料(2015年7期)2015-10-14