
基于模糊神经网络的枸杞滴灌系统设计
2020-06-16 10:36王福平胡永乐李振翔
节水灌溉 2020年6期
张 硕,王福平,胡永乐,李振翔
(1.北方民族大学计算机科学与工程学院,银川 750021;2.北方民族大学创新创业学院,银川 750021)
0 引 言
枸杞(Lycium barbarumL.)作为宁夏人民的主要经济来源之一,一直被广泛种植。但是在枸杞滴灌过程中一直采用的都是人工控制,自动化水平不高,容易造成水资源的浪费,或者没有满足枸杞生长所需要的水分,造成枸杞果实品质差。
针对以上缺点,设计了一种基于模糊神经网络的算法,将土壤湿度的偏差变化率及偏差作为输入,通过模糊神经网络对PID控制器的三个参数进行优化,实现枸杞滴灌时间的控制,最后使用Simulink搭建PID和模糊神经网络PID控制系统仿真模型,进行分析。
1 枸杞滴灌控制原理
枸杞滴灌主要受土壤湿度变化的影响[1],并且枸杞在不同的生长周期需水量不同[2],通过测量枸杞生长环境的土壤湿度,然后根据土壤湿度变化实现对枸杞滴灌时间的控制,保证枸杞生长在适宜的土壤湿度中。
1.1 PID控制原理
PID控制系统主要由控制器和被控对象两部分组成[3]。PID控制器将积分,偏差比例,微分三者结合,实现对被控对象的控制,控制原理如图1所示。
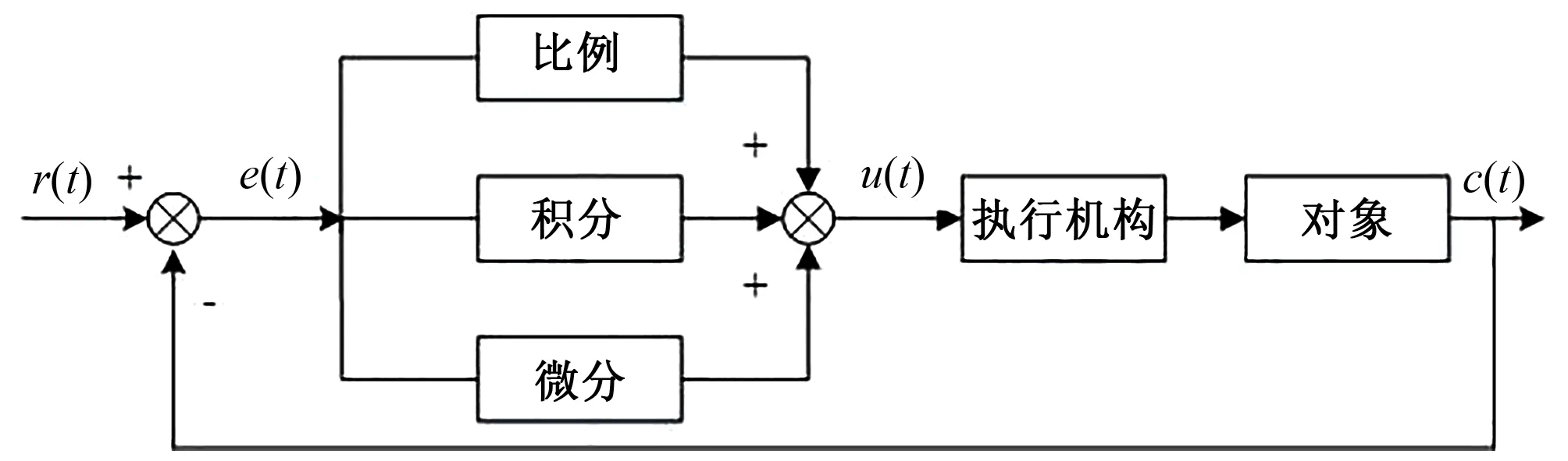
图1 PID控制原理
r(t)为输入量,c(t)为输出量,u(t)为控制量,e(t)为控制偏差,则:
e(t)=r(t)-c(t)
(1)
PID的表达式:
(2)
式中:TI为积分时间常数;KP为比例系数;TD微分时间常数;t为时间间隔。
KP可以快速地产生控制作用,并且可以成比例地反映控制系统的偏差信号e(t),KP逐渐增大,稳态误差逐渐减小,但是震荡比较严重。TI主要作用是去除稳态误差,TI越大,积分作用越弱,过小的TI会使系统震荡严重。TD提高了系统的稳定性和响应速度,还反映了偏差信号e(t)的变化。
位置型PID算法是PID算法的一种形式[4],位置型PID的数学表达式为:
式中:KI=KPT/TI为积分系数;KP为比例系数;KD=KPT/TD为微分系数;T为采样周期;输出u(k)可直接作用于执行机构。
1.2 模糊神经网络控制原理
模糊神经网络是模糊控制和神经网络的结合[5],既能够根据模糊规则进行模糊逻辑推理,又能够对非线性系统有很好的逼近能力[6],兼顾了模糊控制和神经网络的优点。模糊神经网络PID控制系统包含模糊神经网络和PID控制器两部分[7],采用模糊神经网络对PID控制器的3个参数进行调整,从而实现被控对象的自适应控制。模糊神经网络PID控制器的控制原理如图2所示。

图2 模糊神经网络PID控制器原理图
2 模糊神经网络设计
模糊神经网络PID控制系统将土壤湿度的测量值和设定值的偏差e、偏差变化率ec作为系统的两个输入变量,然后输出PID控制器的3个系数KP、KI、KD。将这5个变量分别量化为7个等级,即为{NB、NM、NS、Z、PS、PM、PB},量化论域都为{-6,-4,-2,0,2,4,6}。e和ec的模糊子集均为7个,模糊推理采用Mamdani推理[8],模糊规则可表示为:ife=Aandec=BthenKP=CandKI=DandKD=E,共有49条模糊规则[9],具体如表1所示。
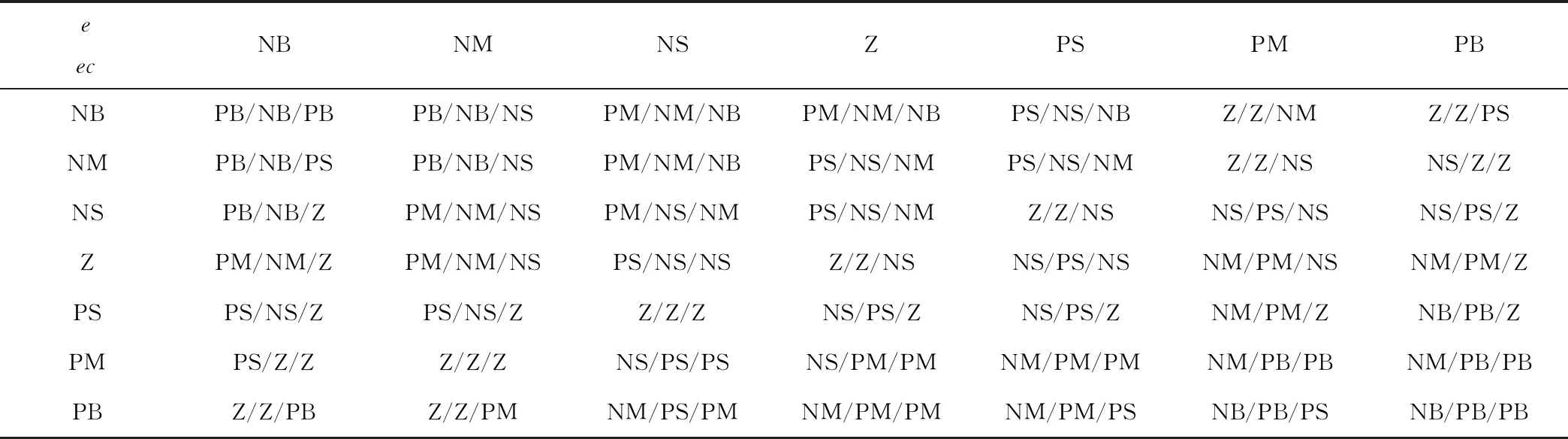
表1 模糊控制规则表
基于Mamdani的神经网络模型如图3所示,采用5层全连接的BP神经网络[10],神经网络结构如图3所示。偏差e和偏差变化率ec作为模糊神经网络的两个输入神经元,PID控制器的3个参数KP、KI、KD作为模糊神经网络的3个输出神经元[11],神经网络拓扑结构为2-14-49-7-3。
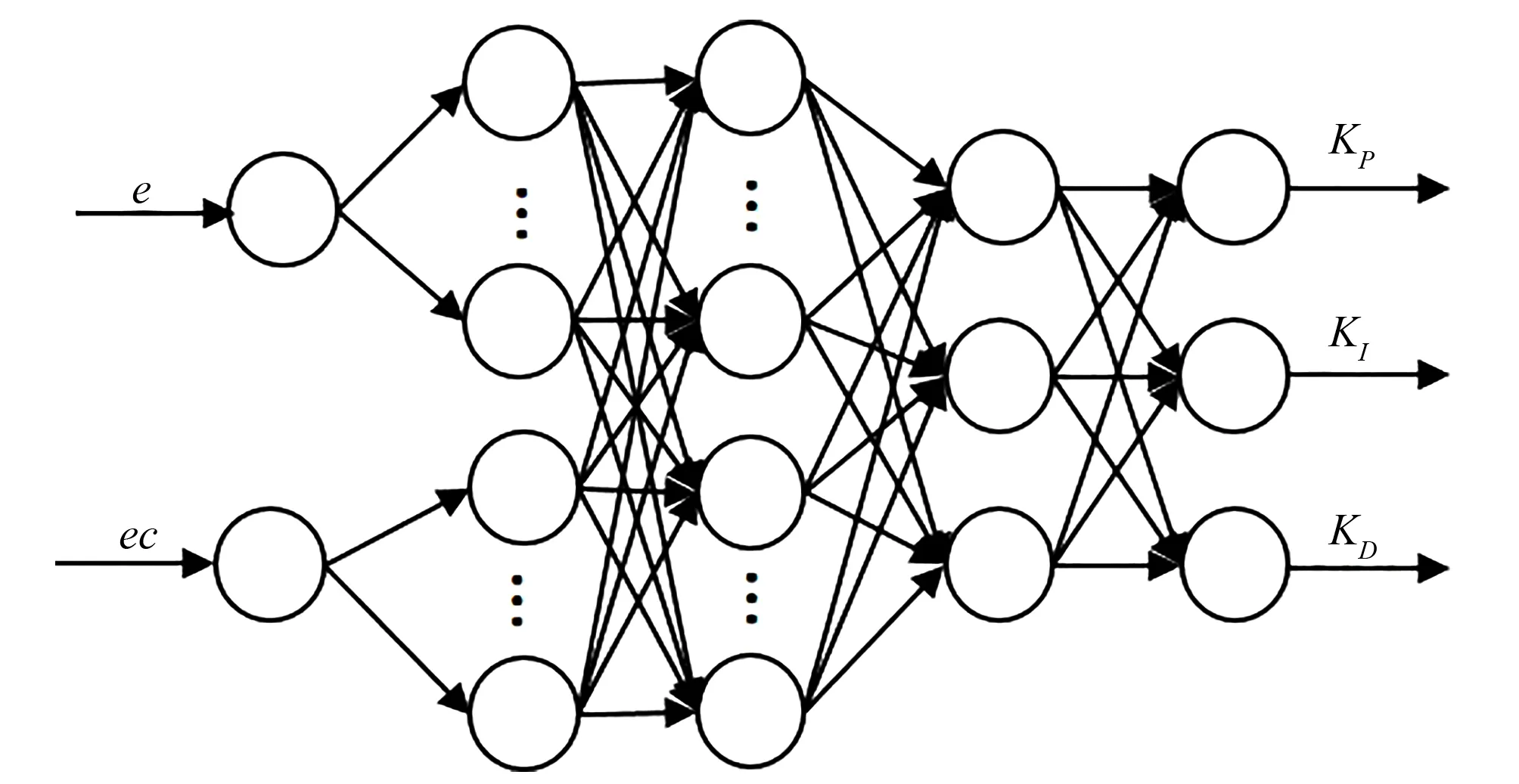
图3 模糊神经网络
网络学习算法如下:
(1)正向传播。任意一个隐含层神经元的输入是前一层所有神经元的加权输出值,即:
(4)
(5)
则:
(6)
输出层神经元的输出为:
(7)


(8)
第p个样本的误差性能指标函数为:
(9)
其中,3为输出层神经元的个数。
(2)反向传播。采用有动量的梯度下降法,调整各层间的权值。权值的更新算法如下:
输出层及隐含层的连接权值wjl更新算法为:

(10)
其中,η为学习速率,η∈[0,1]。
k+1时刻网络的权值为:
wjl(k+1)=wjl(k)+Δwjl
(11)
隐含层和输入层连接权值wij学习算法为:

(12)

k+1时刻网络的权值为:
wij(k+1)=wij(k)+Δwij
(13)
考虑上一次权值对本次权值变化的影响,需要加入动量因子α,此时的权值为:
wjl(k+1)=wjl(k)+Δwjl+α[wjl(k)-wjl(k-1)]
(14)
wij(k+1)=wij(k)+Δwij+α[wij(k)-wij(k-1)]
(15)
其中,α为动量因子,α∈[0,1]。
神经网络的正向传播计算输出层误差,反向传播调整各层权值,一次正反向传播就完成一次迭代,经过多次迭代后,误差越来越小,就可以得到所需的网络训练模型,根据网络学习算法得到模糊神经网络的训练流程如图4所示。
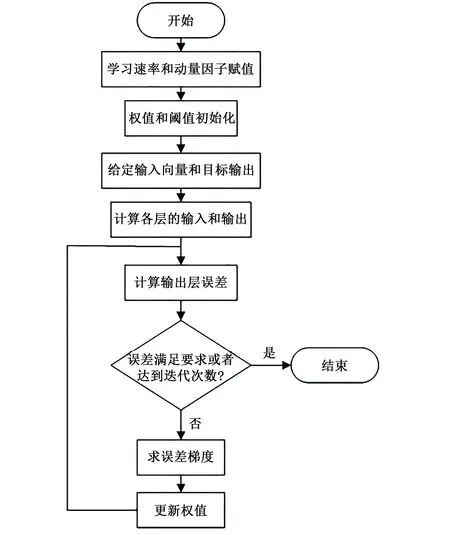
图4 模糊神经网络流程图
根据模糊神经网络流程图,在MATLAB中编写模糊神经网络算法,网络动量因子和学习速率分别设为 和 ,设定网络最大训练次数为7 000 次,目标误差为0.01,然后进行神经网络离线训练,将离线训练好的神经网络转换为Simulink仿真模块,如图5所示。
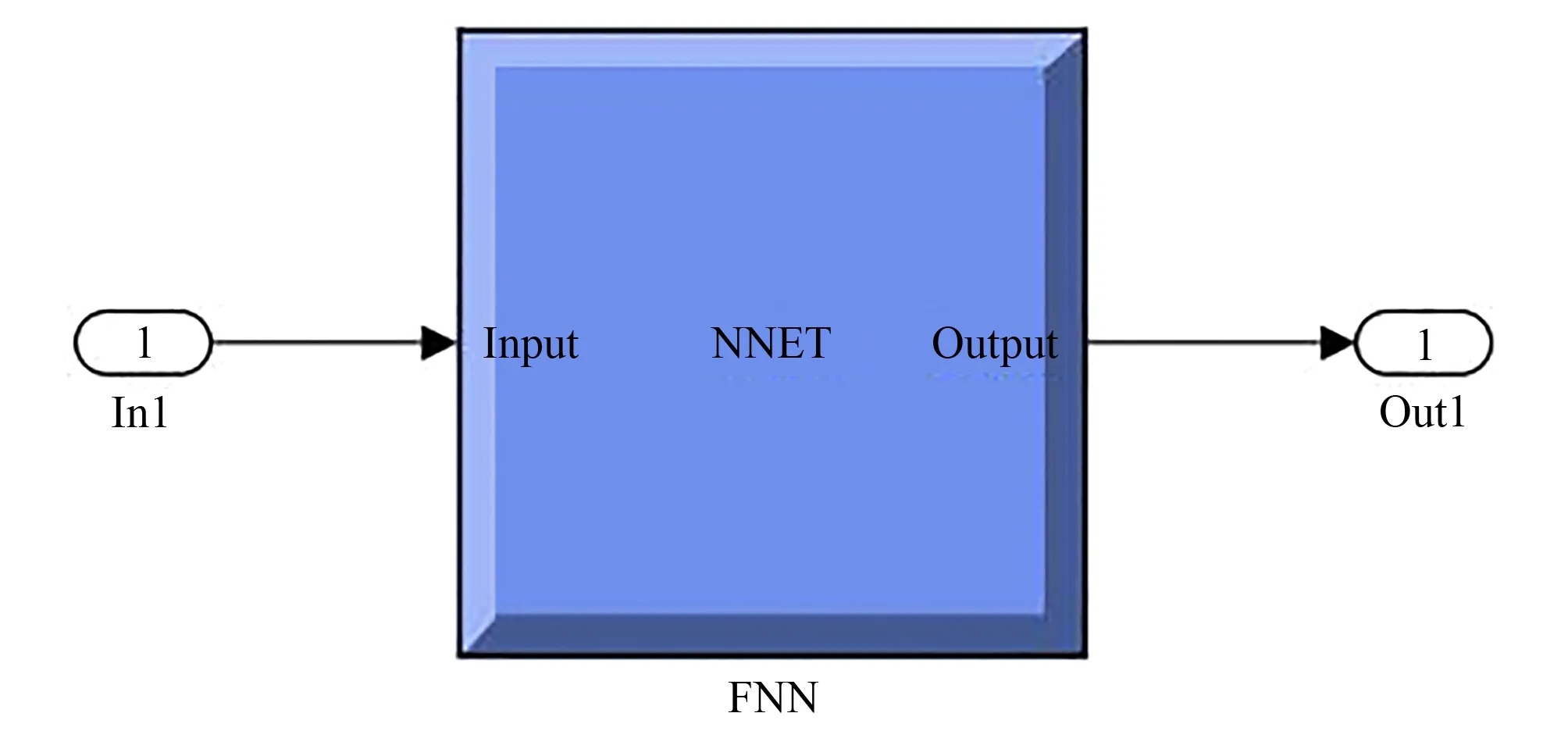
图5 模糊神经网络Simulink仿真模块
3 模糊神经网络控制仿真与分析
枸杞在不同的生理周期对土壤湿度的要求不同,表2为枸杞对土壤湿度的要求。本系统只对枸杞展叶期最佳土壤湿度15%进行算法仿真设计,其他生理周期同理。

表2 枸杞生长周期
根据滴灌经验,滴灌过程可以近似看作一个具有非线性和时滞的一阶系统[12],其传递函数可表示为:
(16)
取各参数为:k=0.023,τ=27,T=800,本文将结合建立的枸杞滴灌数学模型,在MATLAB中使用Simulink搭建仿真模型[13],进行仿真实验。
根据经验法进行多次PID参数整定,最终确定KP、KI、KD的值为100、0.4、0.1。分别搭建PID仿真模型和模糊神经网络PID仿真模型[14],PID仿真模型如图6所示,模糊神经网络PID仿真模型如图7所示。
3.1 阶跃干扰下仿真
在Simulink中建立仿真模型,并且分别给PID控制系统,模糊神经网络PID控制系统一个单位阶跃信号[15],待系统进入稳态后,在PID控制系统仿真模型和模糊神经网络PID控制系统仿真模型 处放置阶跃干扰,仿真结果如图8所示。
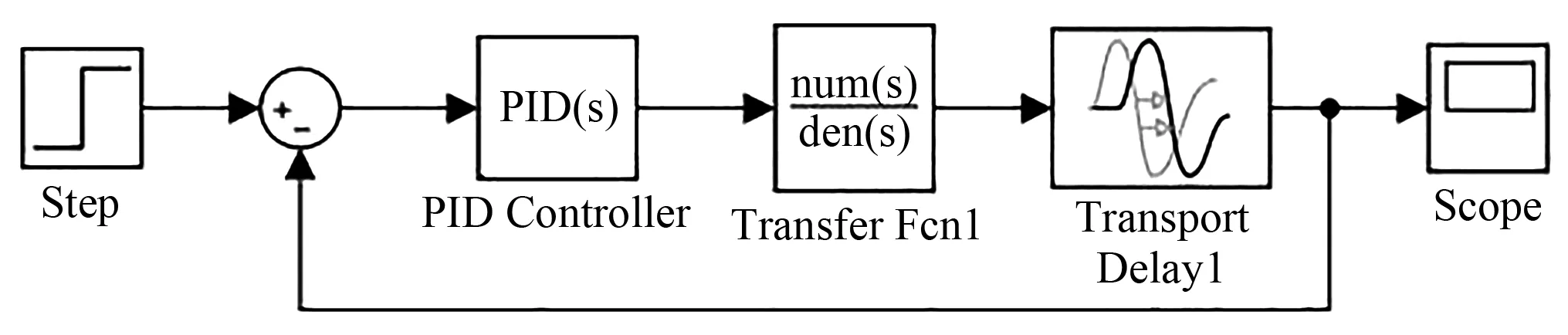
图6 PID仿真模型
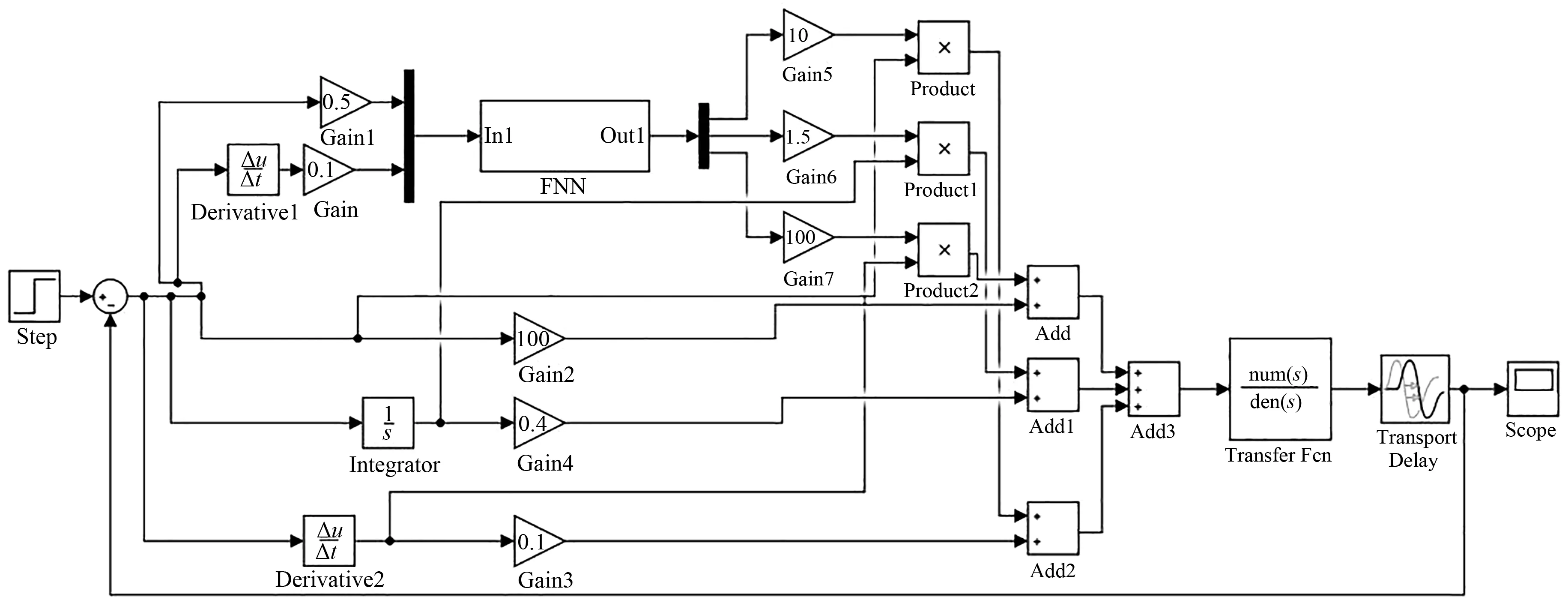
图7 模糊神经网络PID仿真模型
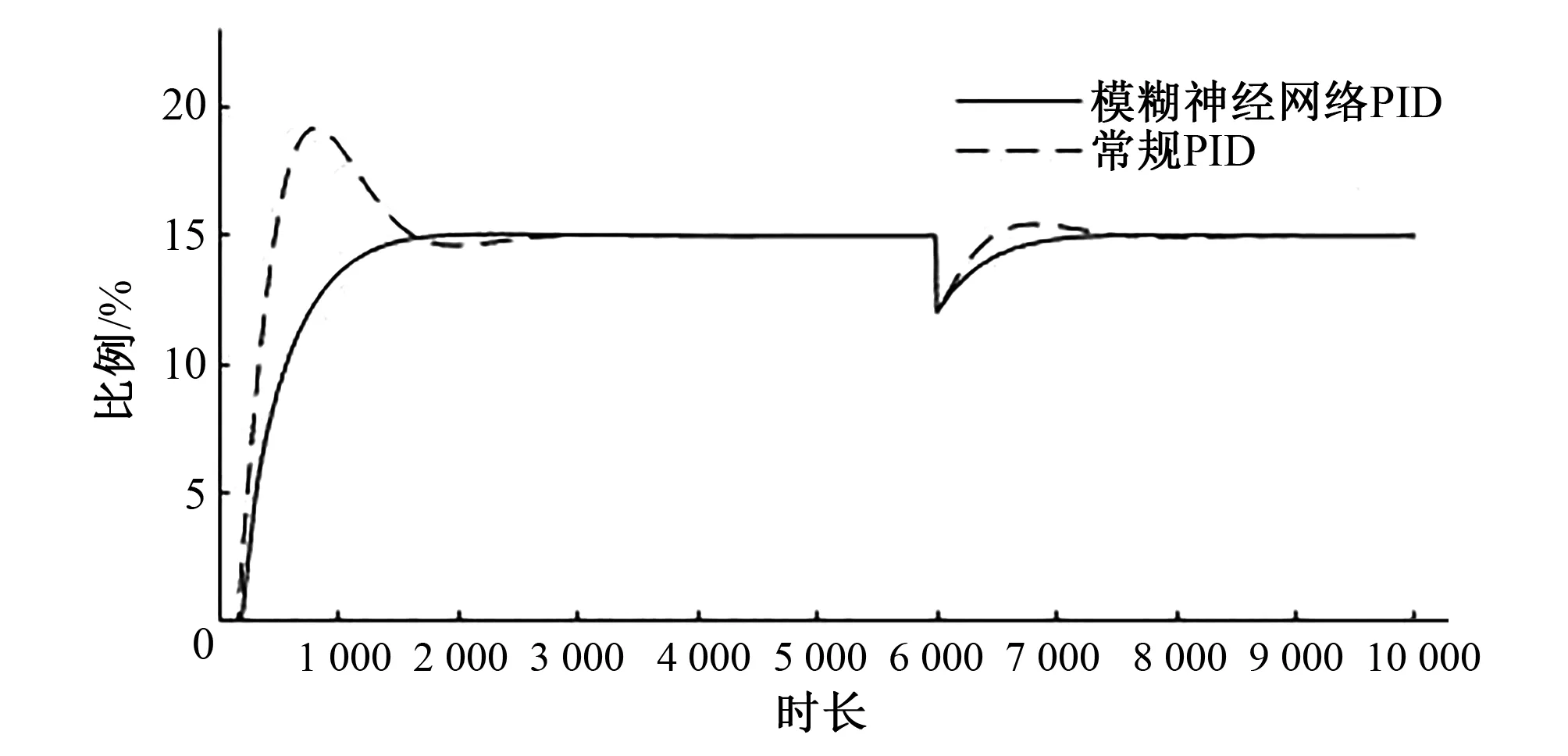
图8 阶跃干扰下的控制仿真图
从图8中可以看到模糊神经网络PID控制效果比PID控制效果好[16],能够将枸杞生长所需要的最佳土壤湿度控制在15%,并且调节时间短,超调量小,响应速度快。在经过一个阶跃干扰后,模糊神经网络PID能够迅速达到稳态,说明模糊神经网络PID控制具有更强的自适应能力和抗干扰能力。
3.2 模型失配下仿真
在实际的灌溉系统中,被控对象会受到风速,温度等因素影响,导致模型的参数产生变化,所以要求控制系统具有自适应能力,能够根据系统工况变化做出反应。为了模拟实际控制系统,需要在一定范围内修改传递函数的时间常数、开环增益等。在此,将时间常数改为1 200,利用建立的模型进行仿真,仿真曲线如图9所示。
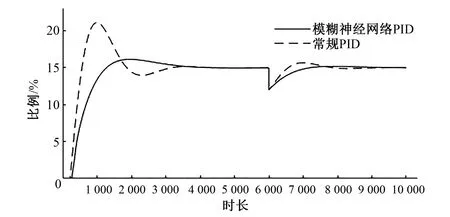
图9 模型失配下的控制仿真图
从图9中可以看到,当被控对象的数学模型变化时,两种输出曲线都发生了变化,常规PID控制的输出曲线震荡较之前明显,模糊神经网络PID控制输出曲线震荡较小,说明了当模型失配时,模糊神经网络PID控制器能快速应对干扰,迅速达到稳定状态。
4 结 论
枸杞滴灌是一个非线性、实时变化的过程,本文设计了一种模糊神经网络PID控制系统对枸杞滴灌进行控制,并在Simulink中进行仿真分析,从仿真曲线中可以看出其超调量小,系统稳定性强,比传统的PID控制效果好,在枸杞滴灌中具有很好的应用前景。
猜你喜欢
成都信息工程大学学报(2022年3期)2022-07-21
农业灾害研究(2022年1期)2022-05-07
邮电设计技术(2021年2期)2021-03-13
天津农林科技(2020年3期)2020-08-13
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25
计算机与数字工程(2019年11期)2019-11-29
电子制作(2019年15期)2019-08-27
电机与控制学报(2018年8期)2018-05-14
西部资源(2017年5期)2018-02-23
电脑知识与技术(2016年29期)2017-04-27
