基于LIN数据的车窗雨刮系统故障诊断
2020-06-15 06:46邹亚强
汽车与驾驶维修(维修版) 2020年1期
关键词:故障诊断
邹亚强
摘要:本文主要对车窗雨刮系统的基本结构、控制方式、网络结构、LIN数据总线的工作原理、故障诊断进行了归纳与分析,希望通过本文和广大维修技师进行研究探讨,为今后的维修工作提供参考。
关键词:车窗雨刮;LIN数据;故障诊断
中图分类号:U472文献标识码:A
1车窗雨刮系统
车窗雨刮归属于舒适系统川。车载网络控制单元接到来自CAN数据总线的开关位置信号,该信号是转向柱控制单元从雨刮开关处读取到的。车载网络控制单元将CAN信号转变成为LIN信号,驱动雨刮执行不同的刮水模式以及变换挡位。
LIN数据总线联网相比较CAN总线网络是性价比更高的解决方案,可将传感器、开关、执行机构及显示屏等元件连接起来。
LIN网络依靠CAN-LIN接口或网关接入到整个车载网络总线中,因此LIN也被称为局域子系统。这种网络不能替代CAN总线,而是CAN的补充。在以线性拓扑结构为特征的LIN数据总线系统中,最多可连接64个设备。但通常情况下,建议最多连接16个设备。根据任务性质的不同,总线设备可区分成主控制单元和副控制单元,传输率在1~20kbit/s之间。LIN数据总线的工作电压为12.0V,无需使用其他的附加电压转换装置。
2案例分析与故障诊断
2.1故障现象
一辆2016年产别克威朗轿车,行驶约6万km,用户反映车辆雨刮不工作。
2.2故障诊断
首先确认故障现象与用户反映的情况是一样的,用KT660解码器读取故障码显示为DTCUl51A(K9车身控制单元与M79挡风玻璃雨刮器电机无法通信)。读取动态数据流,拨动雨刮器开关,观察挡风玻璃雨刮器开关和挡风玻璃雨刮器驻车开关信号,不正常。
2.3系统分析
本故障案例车型的LIN线是传输率为10.417kbit/s的单线,K9车身控制单元和特定子系统内的其他设备之间通过LIN线电路传递串行数据。如果LIN总线网络上的任何LIN装置之间的串行数据通讯缺失,则K9车身控制单元将设定针对非通信LIN装置无通讯的代码。
2.4诊断思路
对读取到的故障码进行分析,通过查阅电路图分析故障范围。根据故障记录的描述,K9车身控制单元与M79雨刮电机之间不能实现数据交换,此故障主要诱因有以下几种。
(1)K9车身控制单元X6插接器的16号端子与M79雨刮电机的3号端子之间导线断路。
(2)K9车身控制单元X6插接器的16号端子对正极或搭铁短路。
(3)K9车身控制单元损坏;
(4)M79雨刮电机损坏或型号错误等。
此外,导致故障码“U151A——K9车身控制单元与M79前窗雨刮电机在LIN总线上失去通讯”的另一个原因,与M79雨刮电机的信号不可信有关。导致M79雨刮电机信号不可信的原因有以下几个。
(1)M79处安装的硬件型号错误。
(2)插接连接件潮湿或有污物等。
2.5故障排除
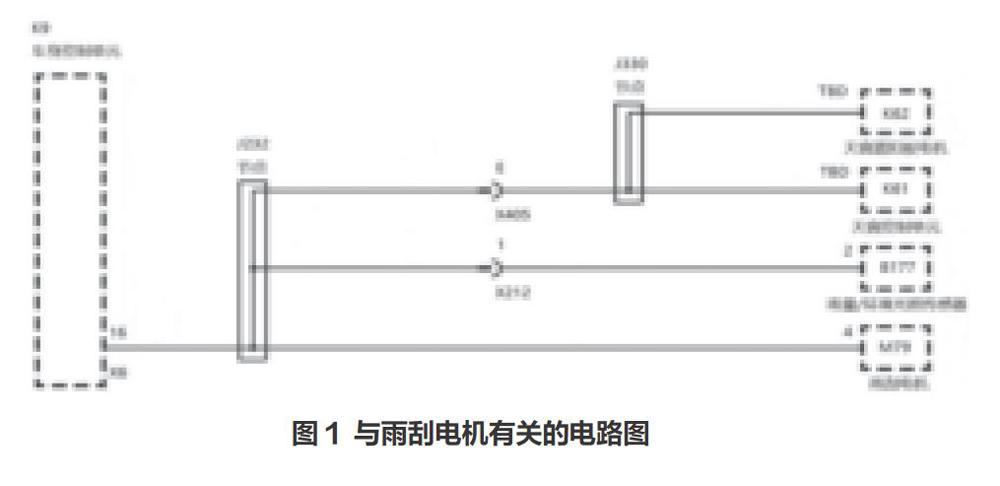
根据电路图(图1),具体的检修步骤如下。
(1)关闭点火开关,使系统断电3min以上。
(2)斷开K9车身控制单元的X6插接器器,测试该插接器的16号端子与搭铁之间的电阻,结果为无穷大,说明该线路不存在对搭铁短路,正常。
(3)测试X6插接器16号端子与M79雨刮电机4号毒端子之间的电阻,结果为0.7Ω,正常,线路正常导通。
(4)断开K9车身控制单元的X6插接器,测试与M79雨刮电机4号端子对应的触点电压为10.5V,正常,说明问题是可能出现在M79挡风玻璃雨刮器电机。
(5)驱动测试M79雨刮电机,其工作正常。
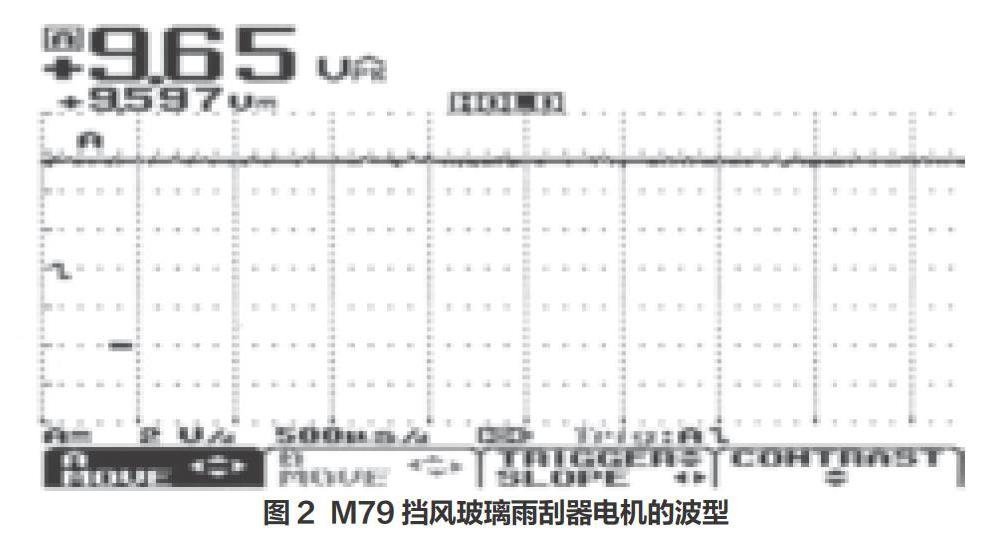
(6)使用示波器测试M79雨刮器电机的波型,如图2所示。
根据波形分析,当测量点LIN数据信息缺失时,示波器只显示其电压值。测试到的电压低于标准电压10.5V,一段时间后电压值恢复为车载网络的电压值例。根据控制原理,当K9车身控制单元向M79雨刮电机发出指令,M79会发送反馈信息。该车故障是由于没有这些信息,故用示波器只检测到稳定电压,并无波动。
因未检查到K9车身控制单元故障,因此拆检M79雨刮电机,发现电机的零件号与标准配件不一致。更换原厂M79挡风玻璃雨刮器马达后,雨刮器能正常工作,故障排除。
LIN数据总线的控制单元包括微控制器、电压调节器以及LIN收发器等构成。LIN收发器依靠线性接口与微控制器进行信息交换。LIN收发器的发送器的作用是转换数据并将数据发送至数据总线系统,而接收器的任务是读取总线传输来信号。微控制器输出的5.0V电压是由电压调节器把车载网络电压降压产生的。在LI N总线中,当主控控制单元进行信息请求时,副控控制单元同时开始数据交换。
车载网络控制单元作为LIN中的主控控制单元的车载网络控制单元,除了控制LIN总线及信息传输流程外,能及时分析处理一切故障、使得总线和它的时基同步、接收总线休眠状态副控单元的唤醒抑制信号以及控制数据与检验字节,并进行系统诊断。
雨刮电动机控制单元作为副控单元执行车载网络控制单元的相关指令。通常一个LIN总线上会连接2~16个副控单元。只有主控单元发出其相应的标识符,副控单元才可以接收与传输相关的数据。雨刮电动机的控制,采用一种可逆电动机,当电动机转动方改变时,同时带动雨刮摆臂的转动。为了确保控制单元的微控制器能够控制调转时刻和雨刮速度,在雨刮电动机的电枢与齿轮间安装霍尔传感器,来检测相关位置与转速,达到精确控制的目的。
转向柱电子装置控制单元是由的多个单元多重叠成。把车窗刮水功能与转向信号功能开关和定速巡航控制系统开关信息发送给CAN数据总线,然后加以分析处理。其特点是能与舒适和动力传动系统CAN上的控制单元进行信息交换。
3结束语
集电极开路驱动器是LI N总线生成信号的发送部件。如果需要发出逻辑“0”的显性电平时,驱动器变换成搭铁状态。当收发器没有受到控制时候,就会生成逻辑为“1”的12.0V隐I生电平。所有网络节点内都有上拉电阻,其中主控单元中阻值1kO,副控制单元中大约30kΩ。信号电压的上升和下降极限范围均为1~3V,u s以防干扰辐射。大数据传输率20kbit/s以达到良好的电磁兼容性。LIN规范文件中明确显性电平和隐性电平的公差,用以保证稳定传输数据。接收器通常以接地或者内部的供电电压作为数参考基准电压。当电压电平不足供电电压的40%时,接收器把该数值认为是逻辑“0”或显性。当电平值高于60%时,就判断是逻辑“1”或隐性电平。就发送器而言,规范中要求的显性及隐性电平和供电电压或接地的偏差不超过10%接收信号时的较大的公差范围,可以保障外部的干扰辐射时,仍然传输良好。
猜你喜欢
电子乐园·下旬刊(2022年6期)2022-05-16
今日自动化(2022年1期)2022-03-07
内燃机与配件(2022年2期)2022-01-17
内燃机与配件(2022年2期)2022-01-17
科学与财富(2020年3期)2020-04-02
科学导报·学术(2019年14期)2019-09-10
振动工程学报(2019年2期)2019-05-13
中国新通信(2016年16期)2016-10-18
科技视界(2016年21期)2016-10-17
科学与财富(2016年28期)2016-10-14