自适应性多管道清洗机器人的系统设计与研究
2020-06-15 06:30齐展飞陈艳
科教导刊·电子版 2020年5期
齐展飞 陈艳
摘 要 当前我国实行的油污管道清洁方式有两种,分别是物理清洗和化学清洗,这两种方法都需要在人工的操作下进行,其清洁效率低下,且造成人工成本的浪费。随着我国经济的飞速发展,人们对生活质量的要求也越来越高,对健康意识和环保意识也越来越强,同时科技进步也推动了清洗技术和装备的快速发展。当下的清洗行业已发展为新型的潜力行业,因此,在管道清洗这一领域设计出一种实用的自动清洗装置显得尤为重要,本课题的研究,就是想利用Solid works这款软件的三维绘图功能,通过数字化模拟建模来设计可用于管道清洗的机器人,解决现在人工清洁所面临的的困难和不便。
关键词 清洗 机器人 Solid works 设计
1研究目的
纵观国内整个餐饮行业,由于油烟管道长期得不到清洗,油渍残留在油烟机和油烟管道上,时间久了形成油垢,油垢越厚就越难清洗,不仅影响到油烟机和油烟管道的使用,缩短设备的使用寿命,增加运营成本,同时造成污染,形成安全隐患。油烟管道现有清洗方法主要是依靠人工作业的化学清洗和物理清洗。工人劳动强度大、效率低,清净率低、成本高、存在人工清洗不到的死角,对管壁易形成物理损伤及污染环境等,特别是对竖直管壁的清洗,作业人员的安全存在较大潜在危险。因此,在这一应用领域研究一种实用的自动清洗装置很有必要,将人从这一危险作业环境中解放出来。随着经济的发展、人们生活水平的提高,人们对于食品卫生,健康的要求越来越高,环保意识越来越强,如何实现油烟管道高效率的清洗成了相关从业人员关注的问题。
2研究意义
(1)能自动适应不同管径,不同放置方位的管道机器人的清洗,特别是可完成竖直油烟管道的清洗。宾馆饭店常常位于高层建筑物中整直烟道的清洗是管道清洗的重要任务。针对現有机器人不能用于竖直管道清洗的缺点,本课题设计了链式腹带行走、水磁吸附的机械行走机构,用于完成油烟管道的清洗爬壁任务。
(2)可提高机器人的清洗效率。现有管道机器人由于机械执行机构只有一个自由度,清洗管道壁时,要通过不断调整机器人的位姿来实现,使操作变得复杂,清洗效率较低。
(3)可改善当前清洗油烟管道工人的工作环境、降低工人的劳动强度、节约清洗成本、消除油烟管道清洗的卫生死角、提高管道使用寿命、提高油烟管道的清洗效率、减少火灾以及可避免化学清洗导致的污染和纯机械消洗对管道造成的损伤等。
3清洁管道机器人的工作原理
清洁管道机器人的构造系统主要由清洁机器人本体、系统外部控制系统和电缆车通信系统组成。首先,清洁机器人的本体是经过行走装置的驱动来进行正常的运动控制,由可以旋转的刀具或清理器件对油污管道的内侧的窝沟层进行清洁。然后机器人的本体连接着一台具有一定压力的水流冲洗机,通过这台水流冲洗机对已经用旋转刀具刮擦过的油污管道进行细致的清洗,把油渍和污垢从管道里冲出去。而电缆车的作用有2种,第一是为清漆机器人本体提供缆线供电,第二是通过电缆线实现对机器人的通信控制。另外,外部控制系统利用一台高运算的计算机来控制整个操作系统。这样就实现了在电脑上通过简单的操作界面来控制清洗管道机器人的运转,利用外部控制系统同时可以监控电源转换器、控制器电路和人家交互设备的运行参数,完美实现各部门的功能运行。
4管道机器人的三维模型构建
首先,通过数据计算来进行机器人数字化三维模型的构建,并在成功建立的模型基础上,对机器人本体的各部位功能进行有效的开发。在管道机器人的研发初期,无论是从投入成本的角度考虑还是自从研发的周期考虑,都需要都管道机器人进行数字化三维建模,然后针对管道机器人的内部的各个机构,进行运动性能仿真模拟,计算出机器人各机构的合理比例和空间面积大小。最后详细记录仿真数据为下一步管道机器人物理本体的制作,提供数据支持。
5管道机器人的内部零件设计
想要详细的计算出机器人的内部零件的尺寸和适配性,就需要借助Solid works这款超级实用的三维绘图软件,它可以将管道机器人的内部各部件进行统一的数字化模型处理,这也是机械行业较为常见的一款三维实体绘图软件。在通过Solid works模拟之后,我们选择实用齿轮咬合滚动的链条驱动作为清洁机器人的运动系统,通过一条单旋转的蜗杆来带动3个呈现120度夹角的涡轮的运转,对应的实体就是,利用单驱动电机实现对3根滚动齿轮的牵引力驱动。
6整体仿真效果和实体样机制作
在进行了管道机器人内部零件的三维设计之后,就需要按照各个零件之间的连动逻辑来进行整体的装配。具体的装配数据如下:定制蜗杆数量为1,齿轮链条的齿数为28,控制蜗杆转动的电机转速为匀速0-120r/min,即输出转轴的角速度为0-720?s匀加速运行,根据转动关系计算,齿轮转动角速度为22.58。管道机器人的本体配备2部支流电机,一部是行动电机,它主要是给蜗杆转动和链条传输提供电力驱动,并与其共同构成机器人的驱动系统。另一部是变径电机,主要是为螺母杠杆平衡和平行连杆结构供电,用以清洁机器人的转弯变向驱动。这样我们便可以根据清洁机器人的整体三维仿真设计,结合现有的零件制作条件,初步研制第一代管道机器人的样机。
7整体的运动控制系统的设计
清洁机器人的整个控制系统是由电脑终端控制系统、DSP主控器、单片机从动器等主要构成,在总线通信和串口连接通信的网络通信基础上,通过结合驱动电路、湿度和温度传感器、速度测量仪和人机交互电路,形成完成的控制链,共同实现对清洁机器人的运动控制和运动参数的记录显示。在利用Solid works软件绘制时,以VC++6.0作为编译语言,把电脑端的控制系统划分为三个区域,分别是端口设置区域、动态数据显示区域和指令发送及反馈区域。电机运转的实时情况在电脑操作界面上显示为动态曲线和动态数据两种模式,而动态数据会按照时段记录并保存在data.txt文件之中,以方便随时查阅。
8运动控制系统的设计
清洁机器人的运动控制系统主要由电机、从动控制器、温度和湿度传感器、速度测量仪以及驱动电路组成。电机是供电保障;从动控制器是功能单片机,负责及时响应电脑主操控系统的信息指令;温度和湿度传感器负责相关数据的采集和传输,将机器人的运动实况及时反馈给电脑主控系统;速度测量仪的功能和温度湿度传感器相似;驱动电路可以控制机器人直行转弯伸缩等运动方式。另外,机器人的运动控制系统需要一部交流电源适配器给控制系统内部供电。
9外部操作系统的设计
外部操作系统主要由主控制器、操作面板、液晶显示器、上下位机通信模块等构成。主控制器的核心是DSP,其功能是及时接收电脑主控制系统的指令,电脑终端的指令在经过调试之后,可以经过上下位机通信机制向运动系统的从动控制器发送指令,操控机器人的运动与否,同时可以接收从动控制器的反馈信息,并通过R式串行调制通信的方式,将反馈信息再发送给电脑主控制系统并在液晶显示器显示出来。操作面板的最大功能是实现操作模式的转换,在一定条件下可以将自动工作模式调整为手动控制模式,让人可以直接控制机器人的运转。
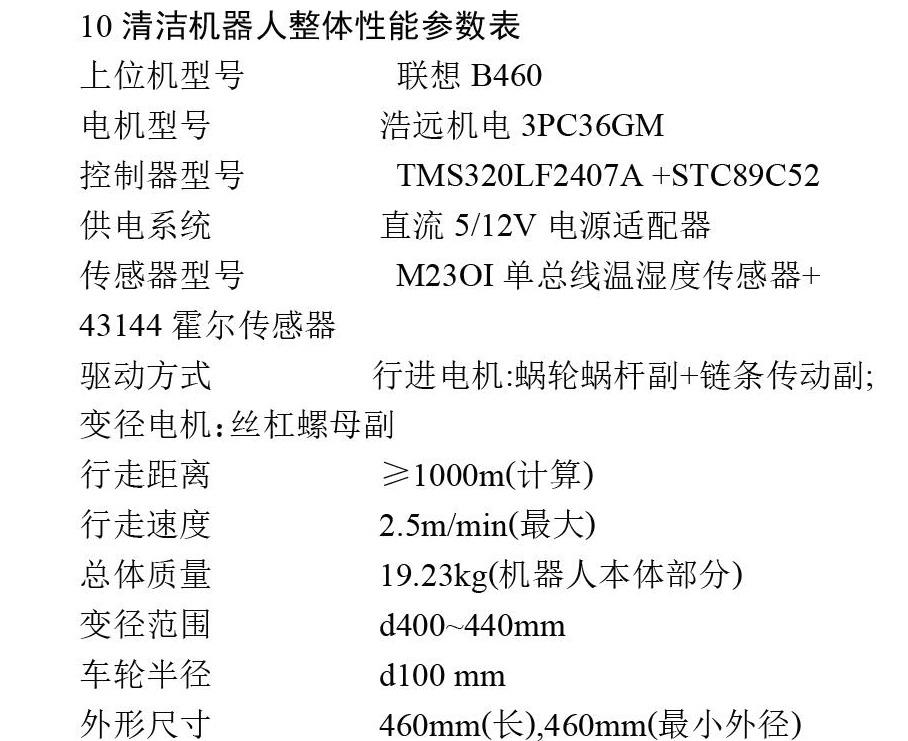
11总结
通过对管道清洁领域的研究我们发现,目前管道清洁仍然存在许多棘手的问题,于是我们便设通过设计智能机器人的方式来解决这些问题。本文通过对清洁机器人工作原理的和设计理念的研究,结合SW这款三维绘图软件对机器人各系统部件进行建模,通过对仿真参数的分析,深入进行控制系统的设计,最后得出清洁机器人的整体性能参数,为清洁机器人的实际制作提供数据支持。
参考文献
[1] 赵伟,殷国富,陈航,etal.基于SolidWorks和ANSYS的機器人手臂性能分析与优化设计[J].机械,2009,36(12):48-50.
[2] 焦圣喜,阚一凡,赵远新.基于SolidWorks的管道除垢机器人设计与实现[J].机床与液压,2014(03):74-76.
[3] 王其林,李倩,孙洁.基SolidWorks的码垛机器人机构设计与实现[J].中国科技纵横,2014(09):44-45.
[4] 余晓鑫,田联房,王孝洪,etal.基于SolidWorks的巡线机器人机械本体设计及越障运动仿真[J].机械设计与制造,2015(08):185-187.
[5] 张小静,吴国东,刘万强,刘亚昆,纪录.基于solidworks工业机器人运动仿真模型创建与分析[A].OSEC首届兵器工程大会论文集[C].2017.
猜你喜欢
艺术启蒙(2018年7期)2018-08-23
海峡姐妹(2017年7期)2017-07-31
Coco薇(2017年5期)2017-06-05
舒适广告(2008年9期)2008-09-22