
船载卫通天线配重最优化方法分析
2020-06-11 00:36徐中洲李红民
物联网技术 2020年5期
徐中洲 李红民


摘 要:船载卫星通信天线的配重在天线转动、跟踪目标卫星中发挥着平衡天线、稳定跟踪的重要作用。文中在介绍船载卫通天线驱动电机工作原理的基础上,结合天线所受的4个力矩,详细分析了天线配重与电流的关系,提出了一种根据天线动态情况下俯仰角与电流关系进行配重优化调整的方法。在此基础上,通过计算,对实际装备的配重进行调整,比较调整之前与调整之后的电流,很好地验证了方法的正确性,解决了卫通天线电流过大、配重过重的问题,对优化船载卫通天线设计和提高伺服系统稳定性具有重要的参考价值。
关键词:船载卫通天线;配重;刚体动力学;力矩平衡;俯仰角;平衡控制
中图分类号:TP39文献标识码:A文章编号:2095-1302(2020)05-00-03
0 引 言
船载卫通天线俯仰轴的装配位置是根据天线座的结构、转动范围、重心位置等因素确定,实际设计中,由于天线结构和材料的复杂性,天线转动的几何中心与重心难以准确重合[1],无法达到静态平衡,因此在天线搜索跟踪时,可能会出现抖动、跟踪稳定性差等情况,为了克服不平衡力矩,考虑在机械上实现力矩平衡[2]。比如在离旋转轴较远的部位增减配重块,以实现俯仰轴力矩平衡是一种常用的方法。
1 理论分析
1.1 船载卫通天线力矩分析
将天线看作刚体进行分析,天线受到的力矩[3-4]有摩擦力矩Mc、不平衡力矩Mg、风力矩Mf 、电机驱动力矩Mt,由刚体定轴转动定理可知:
式中:J为天线的转动惯量;α为天线的角加速度。分别对
4个力矩进行分析。
(1)摩擦力矩Mc采用工程中常用的Stribeck模型[5],只考慮正向摩擦时,Stribeck模型如图1所示。
Stribeck摩擦模型可以由下式表示:
式中:Mc表示摩擦力矩;Mk为库伦摩擦力矩;Mj为最大静摩擦力矩;φ为引起摩擦的相对角速度;φm为Stribeck临界角速度;μ为粘带摩擦比例系数。由图2和式(2)可知,天线达到一定转速时,摩擦力矩Mc和角速度φ呈线性关系,当φ为定值时,Mc也为定值。
(2)不平衡力矩Mg在天线保持自平衡的情况下等于0,根据杠杆原理,此时:
当天线不能保持自平衡时,可得:
此时,天线受到不平衡力矩Mg的作用。
(3)风力矩Mf[6]的计算如下:
式中:Mf为天线承受的风力矩;ρ为空气密度;Cm为风力矩系数;V为风速;A为天线口面积;D为天线尺寸。当风速为定值时,此时天线受到的风力矩固定。
(4)电机驱动力矩Mt未到极限电压时,电机采用id=0的矢量控制方式[7-9],电机转矩和电流为线性关系,斜率为电机的转矩常数b。
俯仰轴的传动比为n,齿轮的传动效率为η,则电机的输出力矩折算到俯仰轴[10]为:
由以上分析可知,当天线配重匹配,天线能够自平衡时,Mg=0,俯仰轴转动的角加速度为α,由式(1)得[11]:
当天线配重不匹配,天线无法自平衡时,Mg≠0,俯仰轴转动的角加速度为α,则。
1.2 船载卫通天线电机电流分析
在天线力矩分析的基础上,为进一步研究电机电流与配重、俯仰角之间的关系,将具体数值代入公式,根据配重匹配情况,分别讨论。
(1)当天线配重匹配时,由杠杆定理:GTLOT cos θ=
GPLOP cos θ,俯仰轴以角速度φ匀速向上转动时,可得:
俯仰轴以角速度φ匀速向下转动时,可得:
由式(8)、式(9)可知,此时电流为定值,不随俯仰角的变化而变化,这是天线运行的最佳状态。
(2)当天线配重过重时,由杠杆定理:GTLOT cos θ 俯仰轴以角速度φ匀速向下转动时,可得: 由式(10)、式(11)分析可知,无论俯仰角θ增大或者减小,电流I均不断增大,且I与cos θ呈线性关系。 (3)当天线配重过轻时,根据杠杆定理:GTLOT cos θ>GPLOP cos θ,俯仰轴以角速度φ匀速向上转动时,可得: 俯仰轴以角速度φ匀速向下转动时,可得: 由式(12)、式(13)分析可知,无论俯仰角θ增大或者减小,电流I均不断减小,且I与cos θ呈线性关系。 1.3 基于电机电流的天线配重调整 当天线配重不匹配时,需要通过增减配重来实现重力矩的平衡,增减配重的质量可根据对电流的分析计算得出。假设此时俯仰轴以角速度φ匀速向上,角度θ1对应的电流值为I1,角度θ2对应的电流值为I2,当天线配重过重时,由式(10)得出配重质量Δm为: 当天线配重过轻时,由式(12)得出缺少的配重质量Δm为: 2 实验验证 2.1 理论Δm计算 为了检验卫通天线配重是否匹配,针对船载某型卫通天线开展实验。实验当天船舶停靠码头,风速为2.5 m/s,船舶横摇小于0.3°,船舶纵摇小于0.3°,卫通配重3 700 kg。单电机转动俯仰轴(E轴)转动角度为0°→90°→0°,转动速度为1(°)/s,分别记录上转、下转电流,结果如图2所示。 通过图2可以发现,俯仰轴转动过程中,无论俯仰角θ增大或者减小,电流I均不断增大,此天线配重过重,计算应减去的配重质量。方法:在天线上转过程中,取6组不同角度下的电流值,计算每组应去除的配重,求平均值,相关信息见表1所列。
2.2 配重调整验证
根据计算结果,去除170 kg的配重,再次测试天线俯仰轴单电机匀速上下转动电流,环境风速为3.5 m/s,船舶横摇小于0.3°,船舶纵摇小于0.3°,卫通配重3 530 kg。单电机转动俯仰轴(E轴)转动角度为0°→90°→0°,转动速度为1(°)/s,结果如图3所示。
通过记录结果可知,去掉配重之后,当天线匀速上下转动时,电流基本保持不变,说明此时天线可以保持自平衡,天线配重匹配。
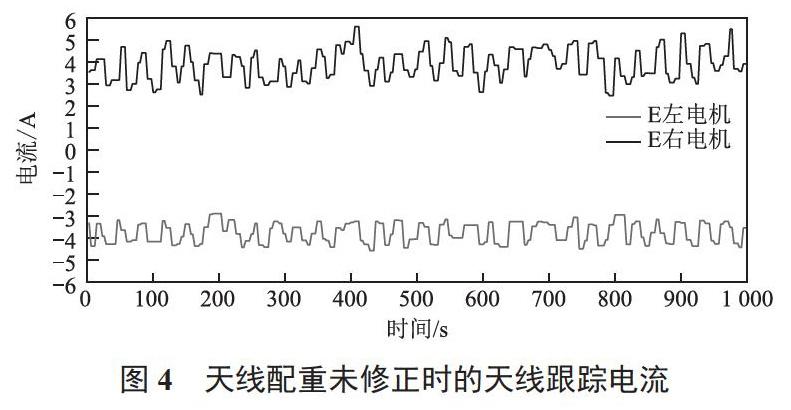
为了进一步验证修正配重质量前后天线的工作状态,取天线配重修正之前和修正之后的跟踪状态下的双电机电流,如图4、图5所示。
对比两组电流数据,可以发现配重质量未修正之前,电流浮动范围为2~6,修正配重之后,电流浮动范围为0.5~3.5,修正之后的浮动范围明显减小,说明在配重質量修正之后天线的自平衡性能得到很大提升,天线电机的力矩大幅减小,这对于稳定天线跟踪、延长电机使用寿命、提高驱动功放使用效率都有积极作用。
3 结 语
本文从船载卫通天线配重的平衡作用出发,结合船载卫通天线永磁式同步电机的工作机理,分析了船载卫通天线的力矩模型,在此基础上建立了电流与配重的关系模型,利用某型船载卫通天线进行验证,实验结果很好地证明了理论计算结果的正确性和有效性。
上述分析和结论能够在船载卫通天线配重调整方面提供借鉴,从而起到改进天线结构、稳定天线跟踪、延长伺服器件使用寿命的积极作用。
参考文献
[1]廖利.一种船载自稳定天线的建模与仿真分析[D].西安:西安电子科技大学,2011.
[2]谢一菲.带有大旋转部件卫星动平衡技术研究[D].哈尔滨:哈尔滨工业大学,2018.
[3]王鹏.“动中通”天线稳定平台伺服控制系统的研究与开发[D].西安:西安电子科技大学,2009.
[4]罗健.船载天线平台稳定与跟踪控制技术研究[D].西安:电子科技大学,2015:20.
[5]许宏,张怡,王凌,等.基于Stribeck摩擦模型的无刷直流电机控制系统设计与仿真[J].电机与控制应用,2011,38(2):26-31.
[6]李志坚,胡金辉.船载雷达风负载设计[J].科学技术与工程,2011,11(30):7560-7563.
[7]翟程远.永磁同步电机矢量控制的研究与应用[D].上海:上海交通大学,2013.
[8]陈荣.永磁同步电机伺服系统研究[D].南京:南京航空航天大学,2004.
[9]袁登科,徐延东,李秀涛.永磁同步电动机变频调速系统及其控制[M].北京:机械工业出版社,2015:82-83.
[10]仲崇峰,王磊.某测量雷达的传动系统设计[J].机械,2015,42(12):58-61.
[11]李永胜.某舰载雷达力学性能研究[D].南京:南京理工大学,2011.
