二类可逆直流调速系统功率器件对比分析
2020-06-08 10:47江春冬
中国教育技术装备 2020年4期
关键词:电机

摘 要 从能量传递方向角度,对比分析可逆直流桥式PWM调速系统和可逆直流V-M调速系统四象限运行时功率器件和电机的状态。首先独立分析两种系统的直流电源主电路形式和四象限运行状况;之后对比给出不同状态时两类系统功率器件的对应关系,给出直流PWM变换器的整流和逆变状态;最后利用正向轻载运行状态对结果进行验证,得到的结论有利于教学过程中学生对两类系统的深入理解。
关键词 可逆直流调速系统;四象限运行;电机;PWM变换器
中图分类号:G642 文献标识码:B
文章编号:1671-489X(2020)04-0120-03
Comparing Analysis of Power Devices in Two-type Reversible DC Speed Regulating Systems//JIANG Chundong
Abstract From the view of direction of energy transfer, the state of the power device and the motor in the four quadrant operation of two-type reversible DC speed regulating systems, the reversible DC bri-dge PWM system and the reversible DC V-M system, is compared and analyzed. Firstly, analyze the main power circuit forms and the four quadrant running status of the above two kinds system indepen-dently. Then give the corresponding relationship between them in different states, and define the rectification and inverter of the DC PWM converter. Finally, test the above results by analyzing the posi-tive light load running state. The conclusion is helpful for students to understand the two kinds of systems in teaching process.
Key words reversible DC speed regulating system; four quadrant operation; motor; PWM converter
1 引言
可逆直流V-M调速系统中,由两组晶闸管为直流电动机供电,每组晶闸管都有两种工作状态,实现能量的双向传输:整流状态是把交流电变成直流电,能量由交流电网向直流电路输送;逆变状态是将直流电变成交流电,能量由直流电路回馈给交流电网[1-2]。
可逆直流PWM调速系统中,对直流PWM变换器而言,能量也能双向传输:或由电机侧向电源侧输送,或由电源侧向电机侧输送。然而电机侧和电源侧都是直流,不好用“整流”和“逆变”对其定义,但同可逆直流V-M系统相比,二者大有相似之处。如果仅从能量方向角度定义“整流”和“逆变”,将可逆V-M系统的晶闸管状态分析过程对比用来分析直流PWM变换器,一是比较有趣,二是通过对比学习,可以使学生更深入地理解直流PWM变换器在不同工作状态时的工作过程及原理。
2 直流V-M系统四象限运行时晶闸管状态分析
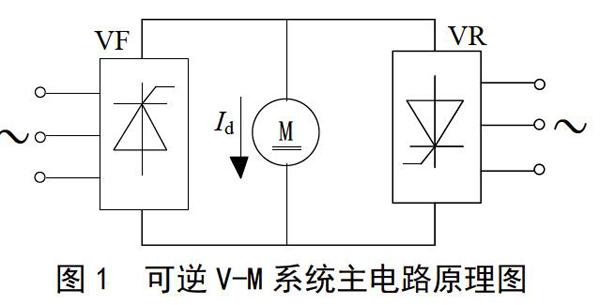
可逆直流V-M调速系统中,直流电源是由两组晶闸管反并联形成的,如图1所示[1]:正组晶闸管VF为电动机提供正向电流,反组晶闸管VR为电动机提供反向电流。图1中电流标注为正向电流方向。任意时刻,只有一组晶闸管在真正地工作,根据电流方向,确定哪组晶闸管在工作;根据控制信号,确定工作的晶闸管是处于整流状态还是逆变状态。
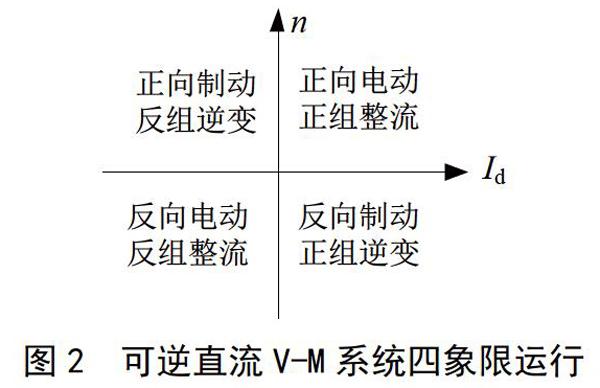
电动机处于正向电动状态时,正组晶闸管真正工作,处于整流状态;正向制动时,由于电流主要为负,由反组晶闸管逆变将能量回馈给电网;反向电动时,反组晶闸管整流;反向制动时,正组晶闸管逆变,于是形成直流V-M系统的四象限运行状态,如图2所示[1]。
3 直流H桥PWM变换器工作状态分析
可逆直流PWM调速系统需要用可逆直流PWM变换器,一般可逆直流PWM变换器采用双极式控制的H桥式可逆电路,如图3所示[1]。图中的功率开关器件VT1~VT4采用全控型电力电子器件,控制方式为PWM控制;对应的四个二极管VD1~VD4起到续流的作用。
双极式控制时,VT1和VT4一组,二者控制信号相同,即Ug1=Ug4;VT2和VT3一组,二者控制信号相同,即Ug2=Ug3,与VT1控制信号相反。双极式控制时四个功率器件的控制信号关系为:Ug1=Ug4=-Ug2=-Ug3。
正向带载电动运行时,桥式直流PWM变换器输入输出关系如图4所示。一個周期内,当0≤t 根据输出电压波形,可得PWM输出平均电压为: 其中,为占空比,Ud为直流平均电压,Us为恒定直流电压。可见正向电动状态时,占空比ρ>0.5,Ud>0,电动机正转。
通过分析可知,其他状态时PWM变换器电枢端电压波形与控制信号均一致,故式(1)对任意状态都适用,如图4所示。
同理可分析出,当占空比ρ<0.5时,Ud<0,电动机反转,此时,VT2、VT3和VD1、VD4交替工作。
正向制动时,控制信号t≥0.5ton,但比前一稳定状态的值小,此时由于平均电压Ud 同理可分析反向制动过程。 4 直流PWM变换器四象限运行分析 通过前面分析,对比可以看出,桥式直流PWM变换器中的VT1、VT4、VD2、VD3相当于V-M系统中的正组晶闸管,VT2、VT3、VD1、VD4相当于V-M系统中的反组晶闸管。 正向电动时,VT1、VT4和VD2、VD3交替工作,将能量从恒定直流电源侧输送给电动机,相当于V-M系统中正组管子在“整流”;正向制动时,VT2、VT3和VD1、VD4交替工作,将能量从电机侧向电网回馈,相当于V-M系统中反组管子在“逆变”;反向电动时,VT2、VT3和VD1、VD4交替工作,将能量从恒定直流电源侧输送给电动机,相当于V-M系统中反组管子在“整流”;反向制动时,VT1、VT4和VD2、VD3交替工作,将能量从电机侧向直流电源侧回馈,相当于V-M系统中正组管子在“逆变”。由此可得到直流PWM调速系统四象限运行特性,如图5所示。 5 两类系统正向轻载状态对比分析 可逆直流调速系统由于正反向电流均有流通的通路,因此,即使电机带负载很轻,也不会出现电流断续的情况,但变换器切换工作要复杂一些。下面分析一下可逆直流V-M系统和可逆直流PWM系统这种情况下的变换器工作状态。可逆直流PWM调速系统分析PWM一个周期情况,可逆直流V-M系统分析一个脉波情况。 轻载时直流PWM系统分析 仍旧以图3所示电路为基础,双极式控制轻载时一个PWM周期内控制信号与电动机电流波形如图6所示[1,3]。 由于系统带载较轻,在器件关断阶段,电流降到零时,开通信号还没有到来,如图中第3段,此时VT2、VT3的控制信号还在,两个功率器件开通,进入到第4段,电流变负。之后,VT1、VT4的开通信号到来,但由于此时电流为负,只能通过VD1、VD4续流,如图中第1段;在电流过零时刻,VT1、VT4再开通,如图中第2段。一个周期四段功率器件和电机状态如表1所示。 轻载时直流V-M系统分析 与直流PWM系统一样,由两组晶闸管反并联供电的直流V-M系统轻载时,一个脉波时电压和电流信号如图7所示。 一个脉波内,由于电流可正可负,可将其分为三段,对三段的分析见表2。 6 结语 根据前面描述,得到如下结论。 1)可逆直流桥式PWM调速系统中的VT1、VT4、VD2、VD3与可逆直流V-M系统中的正组晶闸管相当,而PWM系统中的VT2、VT3、VD1、VD4与V-M系统中的反组晶闸管相当。 2)与直流V-M系统对应,从能量传递方向角度,可将PWM系统中对应的器件的状态分成“整流”和“逆变”两种。但由于PWM变换器两侧的电压均为直流,与真正的整流和逆变是有区别的,需要加引号。 3)正向工作时,根据电流方向不同,正组管子处于整流状态或反组管子处于逆变状态。对应的PWM系统的功率器件亦是如此。同理,反向工作时,正组管子处于逆变状态或反组管子处于整流状态。 4)所得结论同样可分析调速系统的其他过渡状态,如起动过程、制动过程、正反转过程等,同样可加深学生对两类系统的理解。 参考文献 [1]阮毅,陈伯时.电力拖动自动控制系统:运动控制系统[M].4版,北京:机械工业出版社,2014. [2]王兆安,刘进军.电力电子技术[M].5版.北京:機械工业出版社,2015 [3]阮毅,杨影,陈伯时.电力拖动自动控制系统:运动控制系统[M].5版.北京:机械工业出版社,2017. 项目来源:河北工业大学教改项目“适应新形势的‘运动控制系统教学内容改革和实践”(项目编号:201703031)。 作者:江春冬,河北工业大学人工智能与数据科学学院,副教授,研究方向为电力电子与传动控制技术(300401)。
猜你喜欢
防爆电机(2022年3期)2022-06-17
防爆电机(2021年5期)2021-11-04
防爆电机(2021年4期)2021-07-28
防爆电机(2021年3期)2021-07-21
防爆电机(2021年3期)2021-07-21
防爆电机(2021年3期)2021-07-21
防爆电机(2021年1期)2021-03-29
电机与控制应用(2021年12期)2021-02-28
中国自行车(2017年11期)2017-04-04
能源(2016年2期)2016-12-01