
基于矢量线阵的目标低频线谱提取方法
2020-06-08 02:29:34李海涛王易川孙世林程玉胜
应用声学 2020年2期
李海涛 王易川 孙世林 程玉胜 程 健
(海军潜艇学院 青岛 266199)
0 引言
船舶辐射噪声在低频段具有丰富的线谱成分,是一种较稳定的特征信息,此线谱成分的检测对水下目标的定位和识别具有重要意义。而矢量水听器在获取目标信息上具有优势,可以同时获取声压和振速信号,有利于对弱目标的探测。针对矢量信号的低频线谱处理,目前的研究大多集中在单个矢量水听器研究上[1-3],对矢量阵波束形成输出信号的低频线谱提取研究较少。为了有效地将矢量线阵(Vector sensor line array,VLA)获取的船舶辐射噪声特征线谱从宽带背景噪声中分离出来,本文研究了利用VLA 波束域信号提取水声目标噪声低频线谱特征的方法。
1 VLA跟踪目标低频线谱提取
文献[4]中研究了处理矢量阵信号的矢量矩阵最小方差无畸变响应(Vector array minimum variance distortionless response,VTAMVDR)算法,该算法通过Hilbert 变换对时域宽带信号引入复权向量,不需要进行子带分割,且不需要对数据进行分块处理,获得稳定优化权向量估计所需要的数据长度远小于频域MVDR 方法,数据长度合适时,单次快拍即可实现波束形成,VTAMVDR 算法相比于频域MVDR 算法具有较好的性能,具有更高的分辨率和更窄的波束角。由于VTAMVDR 较优的性能且采用单次快拍实现波束形成,使得基于VTAMVDR可以实现对跟踪目标的听测,更好地实现对目标的跟踪波束信号进行分析。本文的研究是在对VTAMVDR 波束形成后所得到跟踪目标声压和振速信号基础上进行的。处理流程如图1所示。
M个矢量水听器均匀布放,间距为d,输入信号经Hilbert 变换H(·),再分别与权系数相乘(权系数的计算见文献[4]),并求和,取逆傅里叶变换实部,可得波束形成后阵列声压和振速信号yp(t)、yvx(t)、yvy(t)。
目标识别关心的问题是船舶辐射噪声的连续谱和离散线谱,怎样获得连续谱和离散线谱是低频线谱分析所要解决的问题。提取线谱时需要把连续谱从整个谱中减去,在剩下的谱中提取线谱。图2给出了VLA跟踪目标低频线谱提取框图。
本文提出的VLA 跟踪目标低频线谱提取方法具体实现步骤如下:
(1)信号预处理
每段N个采样点,将每段信号采样样本x(n)做中心化处理,中心化处理是为了使样本的均值为零[5]。
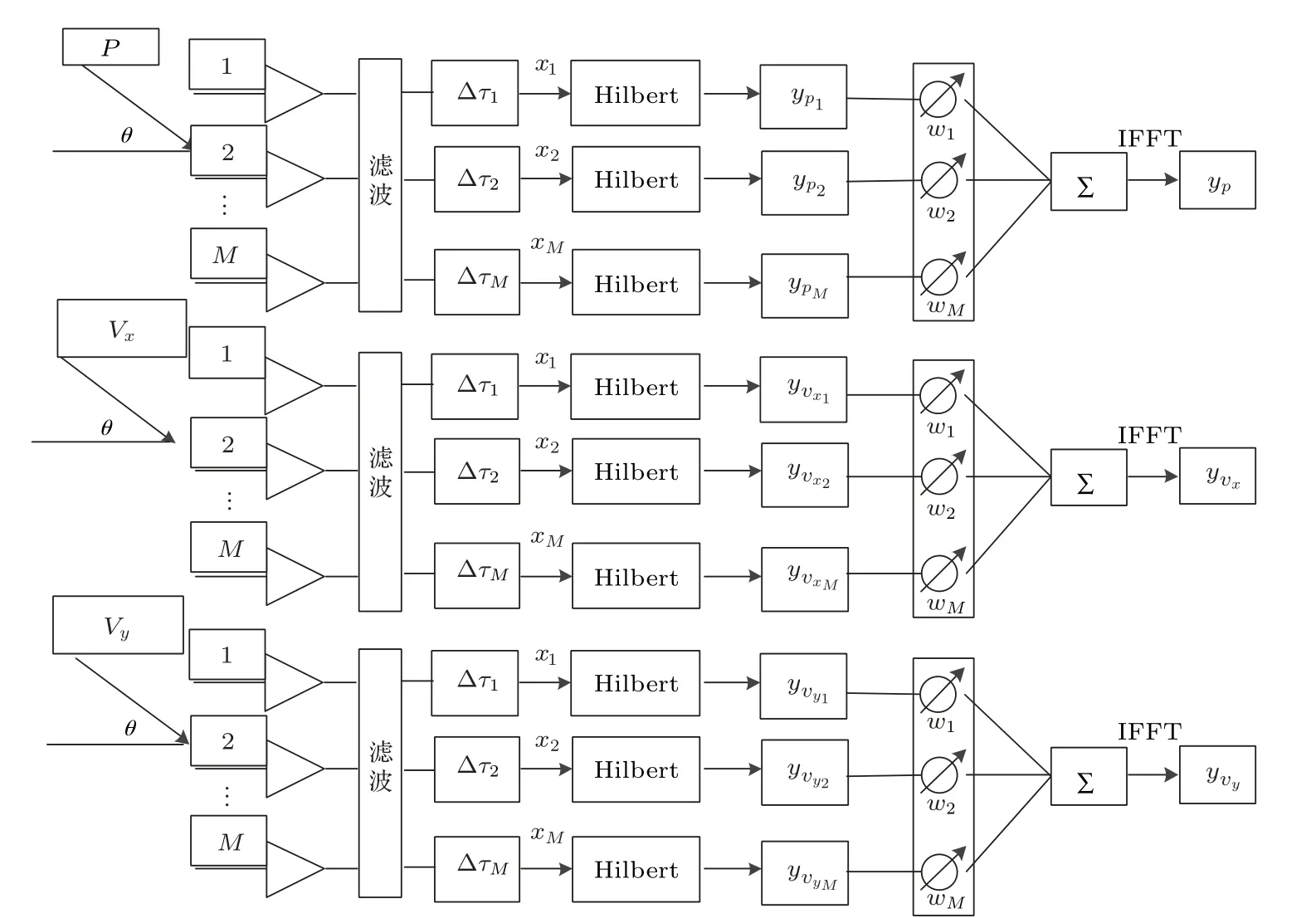
图1 VTAMVDR 跟踪方位声压与振速信号提取流程Fig.1 Extraction process of VTAMVDR tracking azimuth sound pressure and vibration velocity signals
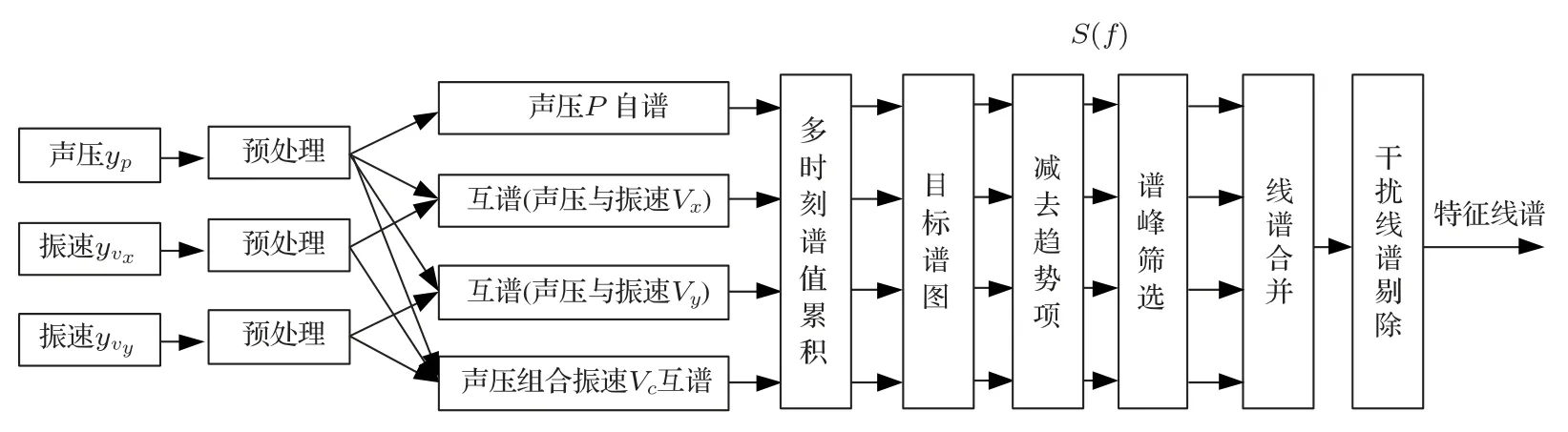
图2 VLA 跟踪目标低频线谱提取框图Fig.2 Low frequency line spectrum fusion extraction block diagram of VLA tracking target
由于低频线谱在频率上和幅度上都存在不稳定性,尤其是幅度上的不稳定性给利用低频线谱进行识别带来很大的影响,线谱的起伏增加了线谱提取的难度,也对某些时刻提取线谱的可靠程度造成影响。通过多个时刻谱值积累平均可以减少偶然因素的影响,抑制随机干扰伪线谱,提高线谱信噪比,增强线谱提取能力,并且利用自适应线谱增强来进一步实现线谱的增强。
(2)提取趋势项
对信号进行功率谱分析得到功率谱S,由于线谱叠加在连续谱之上,为了分解出线谱信息,需要通过谱平滑减去连续谱,得到拉直后的线谱图,只保留线谱。连续谱平滑的方法有很多种,本文采用m次多项式实现连续谱的最优拟合。得到连续谱的变化趋势,从原频谱中减去这一变化趋势,并且将小于零的点置为零,就得到拉平的线谱图。

式(2)中,S(n)为功率谱,为最优拟合连续谱。
(3)谱峰提取
进一步按照以下步骤进行谱线提取:
根据齿圈的实际使用情况,与起动机齿轮啮合时的进入端受冲击力较大,工作频次大,即齿圈的倒角端与齿圈的非倒角端面承受不同的载荷,对齿圈两端面的淬硬层深度要求不同,硬度也不相同,并且为了保证齿的使用寿命,且淬硬层不能过齿根圆,这就是所谓的“阴阳脸”。在实际加工过程中虽然由于某些因素会导致“阴阳脸”的产生,但是这些“阴阳脸”属于热处理缺陷,无法精确控制。
(a)对拉平的线谱图进行归一化得到

(b)对每一点设置标志Flag(n)= 1,n=0,···,N -1,对Z1求平均值,舍去小于等于平均值的点,
(c)剔除连续上升或连续下降中间点,只留下转折点,谱峰所在点在局部地区为最大点,不可能出现在中间点上。
记

可得
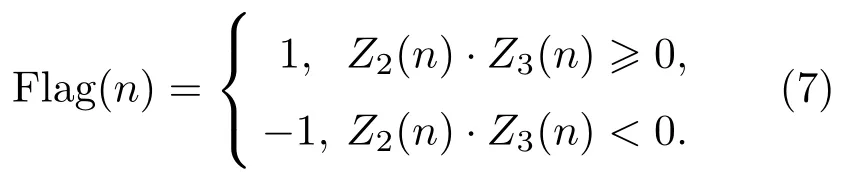
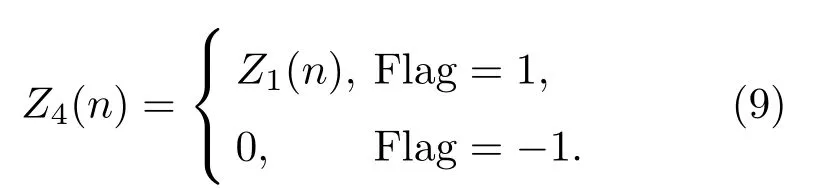
(d)剔除极小值点,
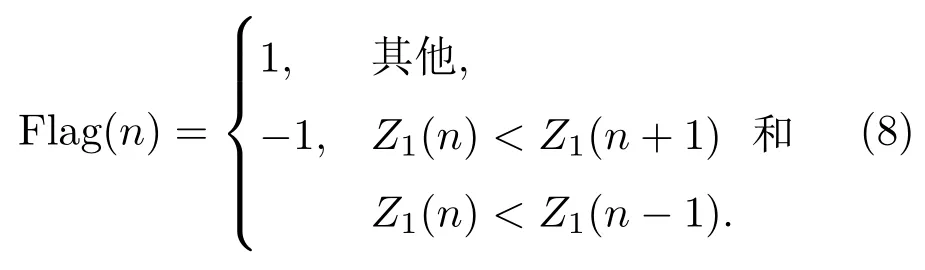
(e)将剔除的点所在位置的值置为零,得到Z4(n),
(f)谱峰合并,设置频率范围门限Δgate,将频率范围Δgate内的线谱看作一个线谱,取局部最大值点,

(g)对剩下的局部最大点进行卡门限处理,在对门限进行选择的时候,由于不同的目标线谱信噪比不同,门限的选择要适应不同信噪比的情况,本文提出利用拉平后线谱Z1(n)的均方差乘一比例因子κ设为门限,

式(11)中:

比例因子κ的设置,是依据大量数据统计得到的,可据历程图的人工观测结果和自动提取出来的线谱结果进行对比分析,最后选定一个比例因子。
(4)利用互谱测向剔除干扰线谱
下面介绍利用VLA 跟踪目标声压振速互谱线谱测向方法剔除干扰线谱的原理。目标信号可表示为s(t),那么VLA 跟踪后得到的声压和振速信号分别为yp(t)、yvx(t)、yvy(t),对yp(t)、yvx(t)和yvy(t)做傅里叶变换,得到相应谱为Yp(f)、Yvx(f)与Yvy(f),则声压振速互谱为

声压、组合振速互谱为[6]
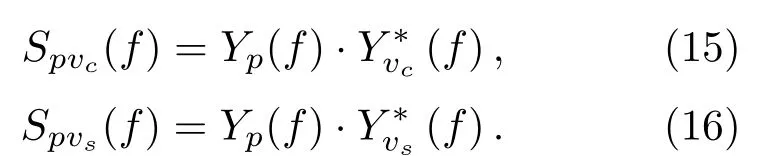
其中:*表示共轭。
对于声压振速互谱来说,由于声压振速是同相位的,根据傅里叶变换的基本特性,两个同相位输入的能量集中在互谱的实部,所以目标信号的能量集中在复声强器互谱输出的实部,虚部中主要为干扰能量。
令
根据式(17)和式(18)可以求出每个频率点对应的方位,
因此可以对筛选之后的线谱Z6(n)进行处理,分别得到每根线谱对应的方位,与目标跟踪方位进行对比,误差较大的不认为是目标线谱,从而将干扰线谱剔除,实现线谱净化。为了保证利用线谱测定方位的正确性,可以采用多个时刻的结果平均的方法。如果测得方位与听测方位不同,误差较大,那么认为不是目标线谱,剔除出去。这种方法可以有效解决左右舷对称方位同时存在目标时特征线谱难以分辨的问题。
2 VLA跟踪目标低频线谱提取海上试验数据验证
选用VLA 实测海试数据,VLA 为32 阵元矢量水听器阵列,间距2 m,长62 m,采用VTAMVDR算法对阵元域信号处理,处理频段50~600 Hz。选取其中一段信号,在左右舷对称方位同时存在目标时刻检验本文线谱提取方法效果,图3给出了VLA波束输出图,目标位于104°方位,左右舷对称方位256°也有一目标。
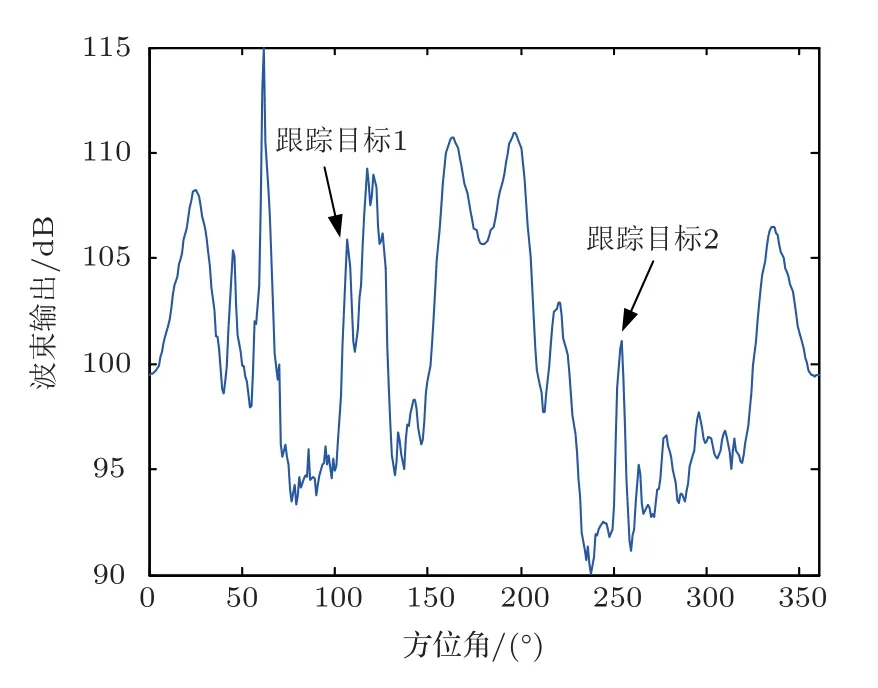
图3 波束输出图Fig.3 Beam output char
采用上文所述过程,对选取目标进行线谱提取,经过声压自谱、声压振速互谱以及声压组合振速互谱计算,归一化,提取趋势项,谱线拉平,卡门限谱峰搜索,干扰线谱剔除等处理过程,最终得到目标的真实线谱。在卡门限谱峰搜索中,经过大量数据测试,对于该阵列,比例因子的值为6时线谱提取效果较好。图4给出了106°方位目标低频线谱的提取流程及结果,图5给出了256°方位目标低频线谱提取结果。
表1、表2给出了两个左右舷对称方位目标的线谱提取过程及线谱提取结果,对于106°方位目标线谱频率分别为98 Hz、215 Hz、285 Hz 和356 Hz,256°方位目标线谱频率分别为186 Hz 和275 Hz,对比表1和表2,不经干扰线谱剔除时,两目标线谱互相干扰,利用线谱测向可分别提取出各自的线谱特征,表明本文方法能良好区分左右舷目标特征线谱。
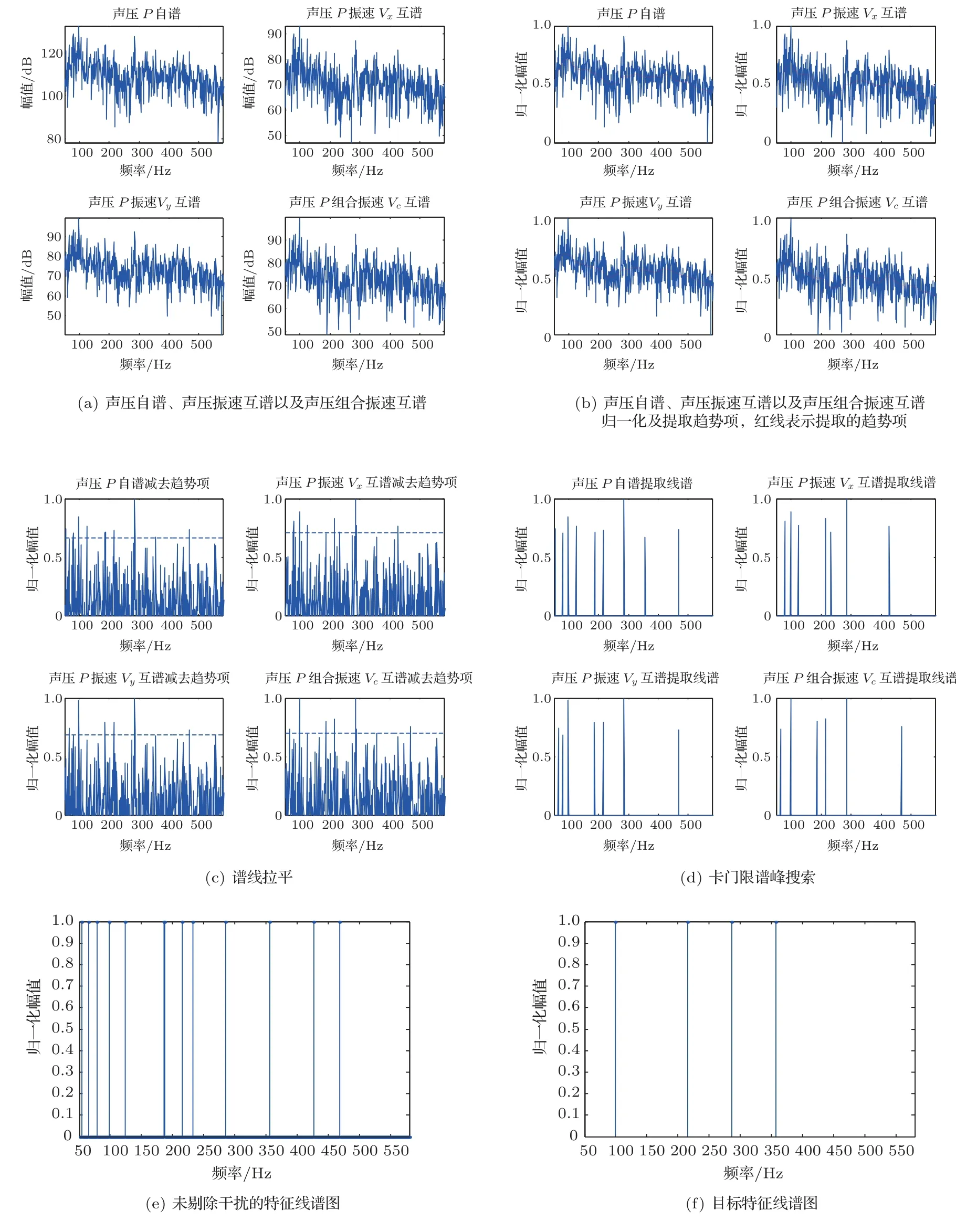
图4 跟踪目标低频线谱提取(106°)Fig.4 Low frequency line spectrum extraction of tracking target (106°)
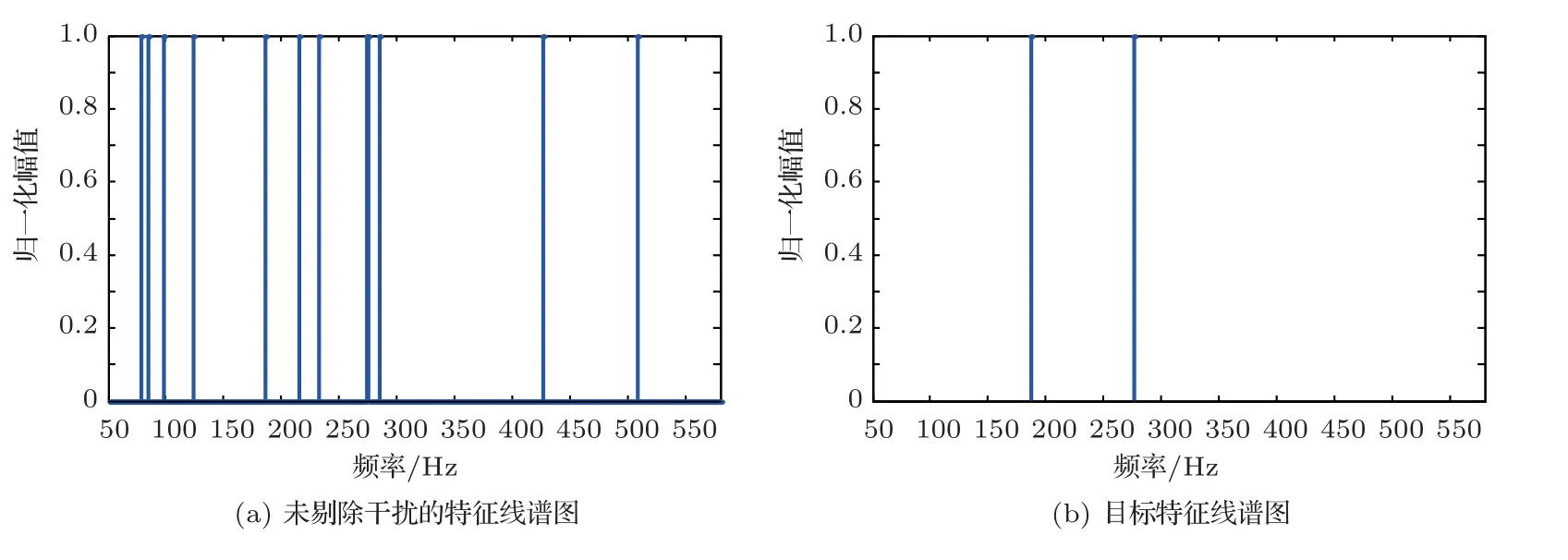
图5 跟踪目标低频线谱提取(256°)Fig.5 Low frequency line spectrum extraction of tracking target (256°)

表1 提取线谱频率及估计方位(106°)Table1 Extraction of line spectrum frequency and estimation of orientation (106°)

表2 提取线谱频率及估计方位(256°)Table2 Extraction of line spectrum frequency and estimation of orientation (256°)
3 结论
本文研究了VLA 跟踪目标低频线谱的提取问题,提出了一种低频线谱提取方法,分别求得声压自谱、声压振速互谱以及声压组合振速互谱,然后经过提取得到未剔除干扰的特征线谱,提出了将拉平后线谱均方差与一比例因子乘积设为门限,可以有效提取线谱成分,利用互谱中高信噪比线谱测向方法剔除干扰线谱,能准确提取出目标特征线谱,较好解决了左右舷目标低频线谱特征相互干扰问题,可供具体应用借鉴。
猜你喜欢
重庆工商大学学报(自然科学版)(2023年3期)2023-07-04 02:14:54
舰船科学技术(2022年10期)2022-06-17 06:27:00
小型微型计算机系统(2021年4期)2021-04-12 09:50:54
国防科技大学学报(2020年1期)2020-02-07 12:58:32
计算机应用(2017年4期)2017-06-27 08:10:42
计算机应用与软件(2016年11期)2016-12-26 08:33:20
发光学报(2016年4期)2016-10-10 02:20:08
旅游研究与实践(2016年3期)2016-07-25 08:00:09
电视技术(2015年5期)2015-06-22 14:40:00
舰船科学技术(2015年8期)2015-02-27 15:38:52
