
基于自编码网络的导弹攻击区实时计算方法
2020-06-08 01:38胡东愿杨任农闫孟达岳龙飞左家亮王瑛
航空学报 2020年4期
胡东愿,杨任农,闫孟达,岳龙飞,左家亮,王瑛
空军工程大学 空管领航学院,西安 710051
现代空战中,空空导弹攻击区是评估导弹性能[1]和战机作战能力[2]的一个重要指标,也是飞行员控制战斗机隐蔽接敌[3]、机动占位决策[4]和确定发射导弹时机[5-6]的重要参考。传统的三线攻击区包括最大可攻击距离、最小可攻击距离和不可逃逸距离,主要反映空空导弹性能的优劣,对飞行员进行战术决策意义不大。随着雷达探测能力和导弹性能的强化,导弹最大攻击距离可达到几十甚至一百多公里,不可逃逸区和最小攻击距离只有几公里,中间存在巨大的态势漏洞,飞行员无法得到有效的攻击区辅助信息。在训练和实战中都急需重新定义攻击包线,并给出准确快速的计算方法,弥补态势漏洞,为飞行员提供战术决策依据。
从目前公开文献来看,导弹攻击区的研究集中体现在3个方面:
1) 攻击区发射包线的仿真计算。该类方法根据运动学、飞行力学进行仿真计算,如三自由度[7-8]和六自由度[9-10]导弹仿真模型。三自由度模型虽较六自由度有所简化,但都需要较长计算时间,无法用于火控系统的在线解算。
2) 攻击区快速拟合。主要有多项式拟合[11-12]、最小二乘法拟合[13]和神经网络法[14-16]。在计算速度上有所提高,但计算结果误差较大。
3) 查表法和插值法[6]方面。查表法是将影响攻击区的各关键参数与包线距离值制成表格,利用表格中的数据线性插值近似替代所求值。这种方法在火控系统中需要占用大量的内存,并且精度损失非常严重。
本文从目标机逃逸机动的角度出发,以攻击机为中心,分析目标在不同机动情况下,攻击机导弹的杀伤范围。利用导弹和目标的六自由度模型,离线仿真计算杀伤包线并构建样本库,引入深度学习对样本库进行拟合。模型拟合精度满足实战和训练需求,解算的时间代价较小,符合空战实时性标准,7条杀伤包线对战场不同空域的态势呈现更加丰富,为辅助飞行员决策提供了理论依据。
1 新型杀伤包线数学模型
1.1 导弹攻击区分析
空空导弹攻击区可分为2种,攻击包线和杀伤包线。目前研究较多的是攻击包线[12,17-20],即以目标机为中心进行描述,攻击机在目标机周围一定区域内发射导弹,以一定概率命中目标。如图1(a)所示,主要由远边界(最大发射距离)、近边界(最小发射距离)来表示。杀伤包线是以攻击机为中心进行描述[21-22],根据导弹性能以及目标机逃逸机动类型来划分,如图1(b)所示。杀伤包线可用于分析攻击机的可杀伤范围、预测攻击效果、识别态势以及辅助决策。
攻击包线受两机的相对位置,姿态角等因素影响较大,难以给飞行员提供有效的态势信息和决策依据,主要用于评估空空导弹的性能,对空战战术决策意义不大。杀伤包线能够为空战提供有效的态势信息,为决策提供依据,但目前在该方面的理论还不够完善。本文在传统三线攻击区的基础上,结合目标机的可用过载及其机动类型,提出7条关键的杀伤包线。
1.2 新型杀伤包线概念
图2为7条新型杀伤包线示意图。
图2 7条新型杀伤包线示意图
1) 理论最大杀伤距离包线
在该距离内,假设目标机保持当前态势不做任何机动,攻击机机动至最佳方位角和一定高度优势下发射导弹。导弹加速到最大飞行速度追踪目标,并截获命中。该距离主要用于第1次接敌时辅助飞行员尽量占取有利态势,受攻击机的最优态势和导弹的性能影响。
2) 最大杀伤包线
在该距离内,目标机和攻击机在当前态势下,假设目标机全程不做任何机动,攻击机发射导弹,导引头以不小于95%的概率截获目标。该距离主要受方位角、进入角和攻击机高度等因素的影响。
3) 侧转机动杀伤包线
在该距离内,攻击机根据当前状态下发射导弹,假设目标在导弹飞行末端做一次90°侧转机动,导引头能以不小于95%的概率截获目标。导弹以与目标相似的路径进行追踪,超过该距离,目标机将以侧转机动摆脱导弹。
4) 斤斗机动杀伤包线
在该距离内,假设目标机以强过载做一次半斤斗翻转,全加力加速至最大速度逃逸,在制导末端,导引头以不小于95%的概率截获目标。斤斗机动不仅增加了导弹的飞行距离,同时目标机的前置角、指向在不停变化,导弹必须跟随其改变。
5) 不可逃逸包线
在此距离内,目标做侧转、半斤斗、蛇形、斤斗或是俯冲都不能摆脱导弹,导引头都能以不小于95%的概率截获目标。超过该距离,目标机能够做强机动以一定概率躲避导弹追踪。
6) 发射后不管距离
在此距离内,攻击机发射导弹后,无需向导弹提供制导信息,该距离取决于导引头的作用距离。
7) 最小安全发射距离
在此距离外,攻击机发射的导弹命中目标,产生的爆破碎片对攻击机没有影响。
7条杀伤包线根据预测目标机可能实行的逃逸机动,将传统的最小距离和目标机之间的空域进行了详细划分,辅助飞行员掌握可能的攻击效果。根据7条杀伤包线定义建立数学模型,仿真求解不同敌我状态下的7条包线的精确值。
2 空空导弹弹道仿真模型
新型杀伤包线的求解涉及到导弹运动模型、目标机动模型,以及弹目导引规律模型。目前的研究主要有三自由度和六自由度2种模型,文献[7]表明三自由度模型解算的时间代价较六自由度模型小,但2种模型计算结果的精度都明显不足。文献[23]将快速计算法、三自由度和六自由度进行对比,结果表明前两者在导弹命中概率上与六自由度模型相比差异较大。考虑到目标机做大过载强机动飞行,导弹在跟踪过程中姿态角将会受到很大的影响,为尽可能减小离线仿真计算的误差,文中使用导弹和目标的六自由度模型。
2.1 导弹运动模型
根据导弹飞行力学原理,建立导弹六自由度模型。文献[6, 16, 19]在此方面都有详细的说明,本文在此不做赘述。
2.2 目标典型机动分析及运动仿真
2.2.1 目标典型机动类型
为摆脱攻击机的导弹,目标机一般会进行机动规避。在实战中,战术机动动作复杂多样,很难全部列举。文献[24]表明复杂的战术动作可以由基础的机动动作组合而成。本文假设目标机在规避攻击机的导弹时,采取的机动方案为最基础的机动动作或其组合。
目前常见的机动动作有2种划分方式:依据操作方式进行划分的操作机动动作[25-26]和依据战术动作理论进行划分的战术机动动作[27]。美国NASA研究人员将机动动作划分为7类基本操纵机动,并用于自主空战决策中。如图3所示,分别为:最大加速、最大减速、最大过载爬升、最大过载俯冲、最大过载左转、最大过载右转及稳定飞行。
这7种基础动作是从飞行员的角度,根据操作控制变量来进行划分,便于了解如何操纵飞机达到相应的机动效果。从战术效果角度,根据机动过载轨迹在三维空间内的变化情况,可以将7类基本动作进行初步的组合实现、归类细化,得到常用的6种基本的战术机动动作[27-28],如图4所示。
6种机动格斗动作的组合可构成了双方交战中摆脱对方跟踪、规避导弹和抢占最佳方位的全过程。结合飞行训练系统(ACMI)中记录的数据对空战过程进行复盘还原,分析可知规避导弹主要有4种典型机动动作,分别为侧转、蛇形、俯冲和斤斗机动,数据还原如图5所示。

图3 基本操纵机动示意图

图4 战术机动示意图

图5 空战机动轨迹
侧转:当目标机发现自身被锁定,或推测攻击机发射导弹时,目标机会以最高的转弯率进行急转弯,转到目标雷达波与飞行方向垂直的位置。在澳大利亚和美军航母编队进行的演习中,澳方的F-111曾以低空侧转冲入F-14的封锁线;北约演习中,英国空军龙卷风F-3也使用侧转机动闯进德国F-4F的近距离。
斤斗:斤斗是极具攻击性的防御性机动,飞行员极限拉杆使机身与地面的角度达到90°,加大推力使飞机不致失速。然后继续拉杆直至机身再次与地面平行(飞机处于倒飞状态),恢复最初飞行方向,最后转为平飞。目标机做斤斗机动时,若在斤斗动作完成前攻击机的导弹未将目标机截获,攻击机很容易反被目标机捕捉,攻击机的优势将会转化为劣势。
蛇形:当目标机侧转摆脱攻击机机载雷达锁定后,若再一次被攻击机雷达锁定,摆脱锁定的最好方法是再进行侧转,两次或多次侧转构成了S型蛇形机动。在海湾战争中,伊拉克空军的MiG-25战斗机就曾以超声速蛇行机动摆脱雷达和导弹的跟踪突入美军F-15战斗机的视距内。
俯冲:在有高空优势的情况下,目标机俯冲机动对攻击机杀伤包线的距离压缩非常明显,随着目标机高度的降低,空气密度变大,导致导弹的动压和阻力过大,射程将受较大影响。若在中低空格斗,该机动方法将受到很大限制,俯冲也会给目标机自身带来很大的危险。
2.2.2 目标运动模型方程
以文献[29-30]中的飞机六自由度模型为基础,建立目标运动方程。
目标质心运动方程为
(1)
目标绕质心转动方程为
(2)

(3)
目标质心运动动力学方程为
(4)
式中:θ为轨迹倾角;x、y、z为目标在地面坐标系中的坐标;ϑ、ψ、γ为目标的姿态角,即俯仰角、偏航角和坡度;ωx1、ωy1、ωz1为导弹相对地面坐标系转动角速度分量;P为发动机推力;X、Y、Z分别为阻力、升力和侧力;α、β分别为迎角和侧滑角;M为外力对质心的力矩;Jx1、Jy2、Jz1为转动惯量;m为质心质量;g为重力加速度。
2.2.3 典型机动动作仿真复现
参考文献[31]中飞机平飞机动、水平转弯和俯冲爬升模型以及文献[24]中的航迹控制模型,在Simulink平台下进行仿真计算。设置目标的初始速度为280 m/s,目标机最大过载为6g。获得侧转、俯冲、水平蛇形、铅锤蛇形、斤斗、半斤斗6种机动,运动轨迹如图6所示。

图6 机动仿真轨迹
2.3 弹目相对运动和导引规律
本文采用实战中使用广泛的比例导引法进行目标追踪,比例导引法是指导弹速度矢量的旋转角速度与目标线的旋转角速度成比例的一种导引方法,导引关系方程为
(5)
式中:K为比例系数;σ为导弹弹道角;q为目标线方位角。本文使用文献[6]中的导弹-目标相对运动模型。
3 离线仿真及分析
3.1 仿真限制条件
当导弹击中目标或确定导弹脱靶时仿真停止,根据弹道脱靶量、工作时间和导弹末端与目标相对速度等参数确定仿真终止条件,攻击失败检测条件可以简化为
1) 距离限制
导弹脱靶量MD超过规定最小的相对距离值,MD≥MDmax目标丢失。导弹飞行的高度不能高于25 km,不能低于200 m。
2) 时间限制
导弹的弹道飞行时间大于可控时间,tD≥tmax,导弹失控。导弹的飞行时间不能超过能源可支持的最大时间。导弹与目标遭遇时,引信解锁时间必须在安全飞行距离之外,若引信未及时打开,目标丢失。
3) 速度限制
导弹惯性飞行速度小于导弹飞行的最小速度时,无法提供足够的升力。导弹接近目标的相对速度太大或太小,引信不能正常工作。
3.2 仿真流程
根据比例导引方式和导弹工作原理,构建制导控制回路,如图7所示,主要由导引头回路、制导指令回路、自动驾驶仪3部分组成,通过弹体运动学方程和相对运动方程形成闭环回路。

图7 导弹制导控制回路
导引头持续对目标进行跟踪,使天线瞄准目标,产生与目标线旋转角速度成正比的制导指令,自动驾驶仪使用文献[32]中提出的过载驾驶仪模型,利用极点配置进行设计。根据制导指令生成控制力和力矩,对导弹的运动参数做出调整,使导弹以既定的程序和导引规律接近目标。
以计算侧转杀伤包线为例,以当前攻击机和目标机的状态为初始点。假设目标在导弹跟踪末期进行一次侧转机动,具体计算流程如图8所示。
首先确定目标机和攻击机的初始运动参数,初始化杀伤包线的攻击范围[Rmin,Rmax],导弹以比例导引律跟踪目标,计算弹目距离,判断是否满足仿真条件。利用黄金分割法在搜索空间[Rmin,Rmax]内选取下一个点,直到空间误差|Rmin-Rmax|满足精度要求为止。

图8 杀伤包线计算流程
3.3 仿真结果分析
以计算导弹的最大杀伤包线为例,目标机和攻击机的初始速度为240 m/s,目标航向角为180°,方位角角区间为[0°,60°],间隔10°,导弹的最大杀伤包线与两机飞行高度关系如图9所示。图9(a)中曲面由下至上方位角度依次递减。图9(b)中的初始速度为300 m/s。图10中虚线反应导弹包线距离受两机高度的影响情况,虚线越密集,包线值变化越剧烈,高度作用越明显。从图9和图10可以得出结论:包线主要受发射机高度影响,两机的高度越高,影响程度减弱。
图11(a)中,两机的高度均为3 000 m,目标航向角为180°,方向角在[0°,60°]内取值,间隔10°。图11(b)中高度均为9 000 m。曲面反应两机的速度变化对最大杀伤包线的影响,曲面由下至上方向角度依次递减。
图12分别为两机高度3 000 m和9 000 m下,速度对包线的影响程度情况,图11和图12表明两机速度对包线距离都有影响,但未出现一方有绝对性作用的情况;两机高度越高,虚线越密集,速度对包线范围的影响越明显。


图9 不同高度下最大杀伤包线

图10 不同高度变化对最大杀伤包线的影响

图11 不同速度下最大杀伤包线


图12 不同速度变化对包线的影响
4 基于自编码网络攻击区拟合
4.1 构建攻击包线样本库
仿真结果表明导弹杀伤包线距离值可以归纳为攻击机高度、攻击机速度、攻击机航向角、两机距离、目标机方位角、目标机高度、目标机速度、目标机航向角的非线性函数。将以上8个参数作为输入,将7种杀伤包线距离作为输出,构建杀伤包线样本库,如图13所示。

图13 杀伤包线样本库
1) 数据离散化
输入变量均为连续性数值,对其分别进行离散化,间隔采样。两机的高度取值空间为[1 000,12 000] m,采样间隔为500 m;两机距离取值空间为[5,120] km,采样间隔为5 km;两机速度取值空间为[150,330] m/s,采样间隔30°;航向角和方位角取值空间为[0°,180°],取值间隔均为45°。
2) 训练集和测试集
通过间隔采样,可获得77 763 000条数据。在构建训练集和测试集时,对不同变量单独处理,在各空间上随机抽取,确保测试集在整体样本空间内的均匀性。以发射机高度变量为例,当Vattack=150 m·s-1,φattack=0°,Distance=5 km,θtarget=0°,Hattack=1 000 m,Vtarget=150 m·s-1,φtarget=0°时,发射机高度从1 000 m到12 000 m之间变化,随机选取其中30%作为测试集,其他作为训练集。其他变量依次增加。
3) 数据归一化
样本库中8个变量的输入量纲各不相同,取值空间相差较大,不便于数据的快速处理与特征提取。使用min-max方法,同时对训练集和测试集进行归一化,将数据映射到[0,1]空间内,即
4.2 自编码网络模型
自编码神经网络(AE)是一种提取无标注数据特征的无监督学习算法,主要可分为编码和解码2个过程。在解决模式识别、数据生成等问题上,自编码网络使用非常广泛并取得了良好地效果。图14为一个简单的自编码网络,只有一个隐含层,图中上部分为编码过程,下部分为解码过程,是一种对称式网络。
在训练过程中,让网络的输入和输出相等,得到预测误差,再进行反向传递,然后逐步的提高自编码的准确率。自编码网络的主要功能就是获取比原始数据更能体现样本特征的隐含层变量。为提高网络的泛化能力,可以在样本输入之前加入高斯噪声,利用破坏的样本,经过编码解码2个过程重建原始样本,网络模型如图15所示。
样本库中杀伤包线的距离由8个变量决定,理论上(BP)网络可以拟合任意非线性函数。实验发现单纯地增加隐含层节点数目并未达到预期效果,简单网络未能学习到数据中的高维抽象特征。在深度学习领域中,无论是分类、模式匹配还是拟合问题,提取数据的特征维度越高,越抽象,越挖掘数据内部规律。利用AE网络对样本库中的变量初步处理,其优势在于既能保持变量的原始规律,也能够提取出初级的高维特征量。

图14 简单自编码网络

图15 降噪自编码网络
4.3 模型构建及参数训练
4.3.1 模型构建
对攻击区的拟合可以分为2个网络:特征提取网络和学习拟合网络。特征提取网络利用自编码网络对样本库中8个变量进行预处理,获取隐含层中更好的特征表达量,称其为隐含变量。在攻击区学习拟合网络中将隐含变量作为卷积网络的输入,利用卷积操作和池化操作交替处理,最后通过BP全连接层得到网络输出的拟合值。卷积网络能够减少待优化的参数数量,保证网络的收敛速度。具体网络模型见图16。
图16 深度学习拟合网络
4.3.2 网络深度设定
在深度学习领域中,目前的研究对如何确定网络的结构和隐含层的深度并没有权威性的方法,也没有明确的原则可以遵循,但可以利用一些经验性的规律。
1) 随着网络深度增加,对样本中隐含规律的学习能力越强,网络提取抽象特征性能越好。
2) 增加隐含层数可以在一定程度上降低网络误差,提高精度,但隐含层越多,网络越复杂,增加了网络的训练时间。
3) 过拟合和梯度消失现象与网络隐层节点数量关系密切,节点越多,过拟合现象越明显。
在依据误差确定网络结构的研究上,文献[33]提出利用重构误差与预测值之间关系的方法,避免了节点数目的随机性和盲目性。文献[22]综合考虑重构误差和测试错误率,逐次增加隐含层层数,从而确定网络结构。
本文基于以上文献的研究,在特征提取网络中,综合梯度和误差的变化情况,通过仿真比较,对AE网络的结构和隐含层节点数目进行探索,利用误差对比,分析不同网络结构对提取样本初级特征的影响。在拟合学习网络中,设置卷积层和池化层成对排列,根据拟合误差对网络层数进行调整。对比分析不同卷积层数对包线距离拟合精度的影响,利用实验结果最终确定网络结构。第i层的输出大小为fi×fi,全连接层神经元数量为fend×fend。
4.3.3 网络参数设置
1) 高斯噪声
在AE网络中,在样本输入之前加入高斯噪声,即成正态分布的噪声N(μ,σ2),μ=0,σ2=1,高斯噪声的概率密度可表示为
利用带噪声的输入和输出来确定AE误差:
2) 学习率
在网络训练过程中,初始学习率一般设置在0.1~0.001之间,随后根据训练次数动态变化。采用分段常数衰减法对AE网络和卷积网络的学习率进行设置,初始学习率均为0.1,从第10轮开始,网络每训练10次学习率减半,如图17所示。

图17 网络训练中学习率的变化情况
3) 初始权值

4) 权值粗调和微调

4.4 实验结果与分析
4.4.1 特征提取网络实验结果
首先训练自编码网络,当隐含层为2层时,依次增加网络的节点数目。每次对训练集训练8 000次,共进行20次循环,得到的训练误差如图所示。在测试集中随机选取700条数据,对含有不同隐含层节点的网络进行测试,得到的训练误差如图18所示。
图19为只有2个隐含层时,不同的节点数目对网络误差的影响,实验表明隐含层节点为12和24时误差较大,节点数为16误差相对较小。
在第一隐含层节点数为16的基础上新增一个隐含层,设置其节点数分别为12、16、24,如图20所示。通过横向对比表明当节点数为24时,误差相对较小。
利用试探法,每次变换一个隐含层的节点数目,根据收敛误差,确定该层相对较优的节点数。在此基础上进一步增加隐含层数,再对比确定该层节点数。图21为3个隐含层与网络误差的情况,图中横向对比表明隐含层节点再增加时,对网络的误差影响较小,网络性能提高不大。但随着隐含层节点的增多,火控系统需要分配更多的内存来存储网络权值,增加空间负担。

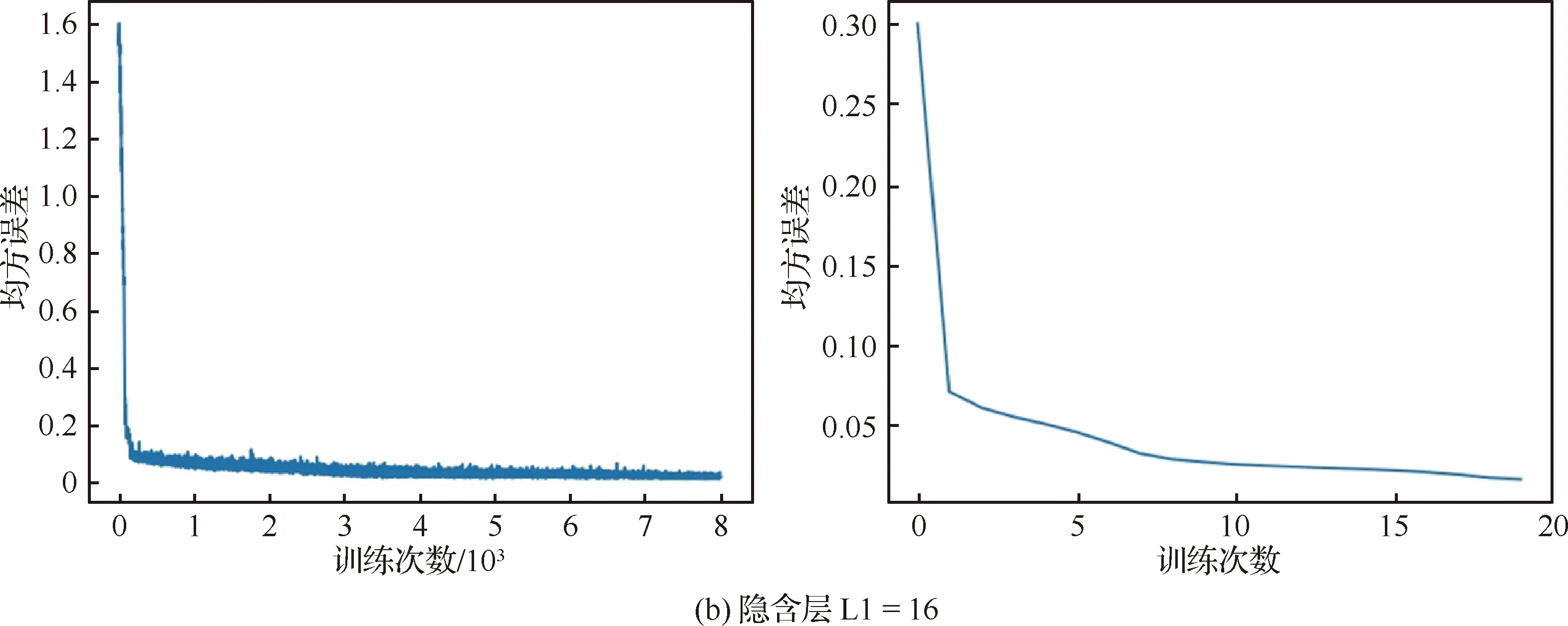

图18 隐含层节点与训练误差的关系
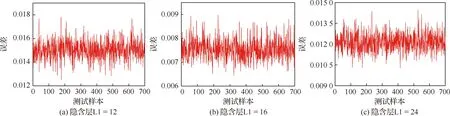
图19 隐含层节点与测试误差的关系
综合不同数量的隐含层下的网络测试误差,分析图18、图20和图21的曲线,纵向对比单隐含层、双隐含层和3个隐含层的网络误差情况,从单隐含层到双隐含层时网络性能有明显的改观,但双隐含层到三隐含层时误差改善不大。通过横向和纵向对比,最终确定AE网络结构为三隐含层,各层节点为16、24、36。



图20 两个隐含层与测试误差的关系


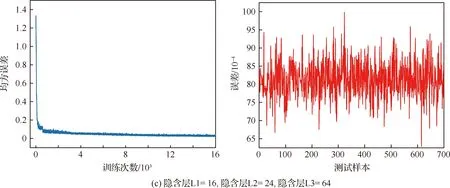
图21 3个隐含层与测试误差的关系
4.4.2 拟合学习网络实验结果
经过AE网络的特征提取,得到样本36维初级特征,利用试探和误差对比方法确定深度网络结构。为便于结果的对比分析,实验中卷积层和池化层使用相同的卷积核,并看成一个整体,作为一层。通过改变卷积核大小和增加网络层深度分析网络结构与误差关系。
图22为网络结构对杀伤包线拟合精度的影响,实验结果表明卷积核越大,网络的训练误差整体偏大,测试误差振荡较厉害,网络收敛所需的迭代次数增加。图22表明网络层数越深,并不一定能降低误差;图22(a)曲线显示4层网络和6层网络的训练误差都较低,并且接近,但6层网络的测试误差较大。文中拟合网络确定为4层,即4个卷积层和4个池化层。
图23为拟合学习网络的全连接层对训练误差和测试误差的影响。图中表明节点数小于18时,随着节点的增多,网络误差整体呈下降趋势。节点数超过18时,继续增加节点,训练误差基本不变,但测试误差较大,网络出现过拟合现象。通过实验对比,最后确定全连接层节点为18,此时的训练误差和测试误差均相对较小。




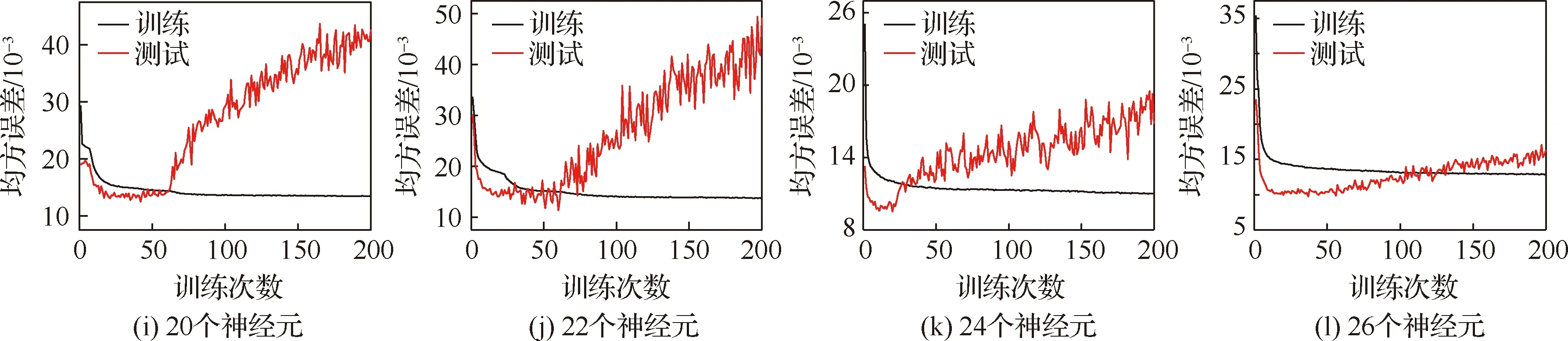
图23 全连接层节点数与训练误差的关系
4.4.3 拟合结果及实效性
在单独训练好的特征提取网络和拟合学习网络的基础上,将网络作为一个整体进行训练,图24 为整体训练误差和测试误差。对结果反归一化换算,网络的精度可以控制在15 m之内。
运用训练好的网络对包线进行实时计算,分别从测试集中随机选取1、10、100、1 000个点,测试网络的计算时间,图25表明,网络实时计算一个点仅需0.04 s,即在某一时刻,同时解算7种攻击包线距离的时间,该时间能够满足实时性的要求。

图24 整体网络训练误差
5 结 论
本文提出新型7种杀伤包线概念,根据运动学模型离线仿真计算,并建立样本库,引入深度学习对样本进行拟合,根据实验结果可以得出以下结论。
1) 杀伤包线对发射机高度变化较为敏感,当发射机高度达到7 000 m以上时,高度不再是决定性因素,随着两机的高度的增加,影响程度减弱。
2) 杀伤包线考虑到目标的机动类型,为飞行员根据导弹攻击区把握战场态势提供了新方法,可以有效避免三线攻击区带来的态势漏洞。
3) 利用深度学习模型解算杀伤包线能够有效降低误差,提高计算精度,解算所需的时间能够满足空战实时性需求。
猜你喜欢
今日农业(2021年17期)2021-11-26
考试与评价·高二版(2021年1期)2021-09-10
小学生学习指导·小军迷联盟(2019年2期)2019-09-10
当代陕西(2019年12期)2019-07-12
汉语世界(The World of Chinese)(2019年1期)2019-03-18
小学生学习指导(小军迷联盟)(2018年9期)2018-09-12
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
中学生数理化·七年级数学人教版(2016年6期)2016-05-14
海峡科学(2013年3期)2013-10-21
