
小型无人直升机模型辨识数据处理方法研究
2020-06-06 06:56刘灵哲
计算机测量与控制 2020年5期
周 健,刘灵哲,洪 良
(西安工程大学 电子信息学院,西安 710048)
0 引言
近年来,随着微型处理计算机和惯性器件的集成化、商用GPS的小型化以及无线电遥控模型直升机的普及,许多高等院校和科研机构开展了小型无人直升机系统的学术研究以及研制工作。小型无人直升机精确的动力学模型以及适用的飞行控制系统是小型无人直升机系统研制的关键技术。通过多年的技术积累,欧美等发达国家已经实现了小型无人直升机定点悬停与航点飞行的自动飞行任务,并且已经有成熟的型号和产品在军事和民用领域中广泛应用[1-3]。
小型无人直升机系统动力学模型的获取多采用机理建模与模型频域辨识相结合的建模方法得到[4-6]。小型无人直升机模型频域辨识过程中,需要在了解小型无人直升机系统飞行动态特性和机理特性的基础上,设计小型无人直升机特定的飞行输入激励信号,所设计的激励信号需能满足小型无人直升机不同飞行场景下的应用需求。模型辨识方法是一种基于数据驱动的建模方法,因此,需要采集小型无人直升机实际飞行过程中的各种飞行状态数据。飞行过程中复杂的飞行环境以及飞行控制系统各部件设计的非理想性,使得采集到的飞行数据存在多种误差,这些误差如果不能有效剔除,会直接影响辨识所得到的动力学模型精度。
本文在自主设计的小型无人直升机系统[7]上,针对模型频域辨识方法中系统激励信号设计和飞行数据处理问题,开展相关研究工作,为小型无人直升机精确飞行控制提供高精度的飞行数据,并为研制能够搭载多种传感器的中大型无人直升机飞行控制系统累积研发经验。
1 小型无人直升机系统结构
小型无人直升机系统方案设计围绕着通用性、模块化和可扩展性的设计思想,系统设计和传感器选型时需要兼顾考虑系统模型辨识与飞行控制对系统组成的性能需求。因此,所构建的小型无人直升机系统不但具有能够满足飞行控制实时解算与处理的能力,还增加了能够实时采集和记录飞行输入输出信号的飞行记录设备,以满足模型辨识方法对系统飞行输入及输出信号的要求,小型无人直升机系统如图1所示。
机载电子设备作为小型无人直升机飞行控制的核心部分,不但需要对飞行时的三轴加速度、三轴角速度和地理位置等信息进行实时测量,还要具有飞行控制律实时解算和处理的能力。

图1 小型无人直升机系统
小型无人直升机的机体主要是由旋翼、机身、尾桨、垂直安定面、水平安定面和发动机组成。其中旋翼包括由两片桨叶组成的主旋翼和Bell-Hiller稳定副翼;尾桨的作用主要是产生侧力,用于平衡主旋翼的反扭矩,控制尾桨距的大小可以形成偏航力矩,使小型无人直升机飞行方向发生改变[8]。为了增加小型无人直升机航向的稳定性,减小外界环境因素对航向的影响,通常在航向通道上加装锁尾陀螺仪用来提高航向通道的稳定性,该锁尾陀螺仪是一套独立的闭环控制系统,通过锁尾陀螺仪适当的调试,即使在不加控制作用的情况下,使其航向也是稳定的。小型无人直升机控制结构如图2所示。

图2 小型无人直升机控制结构
小型无人直升机是一个典型的多输入多输出(multiple input multiple output, MIMO)系统,控制输入通过控制执行舵机产生相应的舵面偏转,改变作用在小型无人直升机上的力与力矩的大小和方向,进而改变相应的飞行状态。控制的输入量包括横向操纵输入δlat、纵向操纵输入δlon、航向操纵输入δped、总距操纵输入δcol和油门操纵输入δthr。小型无人直升机在三维空间中运动的状态变量分别为:直升机运动的位置变量(x为纵向位移、y为横向位移、z为垂向位移),速度变量(u为纵向速度、v为横向速度、w为垂向速度),姿态角变量(φ为滚转角、θ为俯仰角、ψ为偏航角)和姿态角速度变量(p为滚转角速度、q为俯仰角速度、r为偏航角速度)。
2 飞行试验扫频测试技术
在确定了小型无人直升机系统及其外作用力的数学模型结构后,模型辨识主要是利用试验的实测数据,估计系统数学模型中的待辨识参数。模型辨识的参数估计可分为时域辨识和频域辨识两类。与时域辨识的方法相比较,频域辨识方法优点有:
1)可以通过试验的方法得到待辨识系统的具有明确物理意义的动态特性参数;
2)当系统在某些频率范围存在严重噪声时,可以较容易的抑制噪声对系统辨识结果的影响;
3)能够对多次的试验数据进行压缩和合并处理。
小型无人直升机系统的频域辨识可以对其整个系统或子系统(执行机构模型或发动机模型)分别进行参数化辨识。根据频域辨识步骤中试验设计环节可知,设计特定的小型无人直升机飞行输入激励信号是了解其飞行动态特性和数学模型建立的基础,这就需要所设计的试验信号能够满足小型无人直升机不同的应用需求,例如:低频信号能够满足小型无人直升机飞行控制器设计和动力学建模要求,高频信号可以进行小型无人直升机结构稳定性分析。为了使得输入信号能够同时覆盖小型无人直升机系统的低频段和高频段,系统频域辨识中常采用扫频输入信号或对偶输入信号作为典型的输入激励信号[9]。
针对小型无人直升机某一特定飞行模态采用扫频输入激励进行频域辨识时,应保证飞行试验过程中飞行状态的一致性,应尽可能的保证操纵手输入的激励信号的自功率谱为常值,并且输入的激励信号能够容易的复现,同时要避免大机动的飞行动作[10-11]。由于频域辨识算法是将时域数据通过傅里叶变换的方法转换到频域,因此,对扫频输入信号无需要求精确地频率输入,并且输入激励的频率和幅值对辨识分析结果不会产生影响[12],这就很大程度的减轻了地面操纵手飞行操纵时的负担。

图3 小型无人直升机扫频输入信号
本文采用一种正弦扫频输入信号作为对所研究的小型无人直升机的输入激励信号,针对该小型无人直升机的飞行特性和工作带宽,选取扫频输入信号的频带为0.6~18 rad/sec。图3为飞行测试时小型无人直升机横向通道扫频操纵输入信号。在进行扫频试验时,为了保证小型无人直升机飞行状态的一致性,应尽可能的在一个飞行起落连续进行3~5次同一测试通道的扫频输入。这种方法对操纵手的操纵水平要求较高,因此,要获得较好的小型无人直升机模型辨识结果,需要通过反复的飞行训练来提高操纵手扫频输入的飞行操控水平。
3 模型辨识数据处理方法
小型无人直升机飞行数据误差包括风场对飞行状态的影响所产生的误差,传感器数据采集系统的误差等确定性误差和随机误差。在进行模型辨识前,必须对采集得到的飞行数据进行预处理,以消除采集测量过程所引入的各种误差[13]。
3.1 有色噪声卡尔曼滤波器设计
小型无人直升机无论是在悬停模态还是前进飞行模态时都会受到大气扰动紊流风场对飞行状态的影响,主要表现为在前进飞行时的飞行速度和姿态具有随机变化的特点[14]。这种随机变化在飞行控制时,会使执行舵机不断的接收调整指令。执行舵机长时间且频繁的调整,必然会影响执行舵机的调整精度和可靠性,甚至会在飞行时出现执行舵机损坏,导致小型无人直升机损毁的情况发生。
卡尔曼滤波器能够对带有随机噪声的信号进行滤波和在线状态估计,并且具有较好的动态特性和抗干扰能力。卡尔曼滤波器一般是在系统噪声和量测噪声均为白噪声的情况下使用,而大气紊流风场模型具备有色噪声的特性。因此,需要将有色噪声白色化并建立紊流风场数学模型,在此基础上,就可以使用卡尔曼滤波器对进行飞行状态估计。
紊流风场中,小型无人直升机的系统噪声为有色噪声而量测噪声为白噪声,其俯仰运动方程可表示为:
Xk=Φk,k-1Xk-1+Γk-1Wk-1
(1)
Zk=HkXk+Vk
(2)

在研究有色噪声建模时只需考虑扰动风速对系统的影响,而有色噪声可以看成是由白噪声通过动态系统形成的,满足方程:
Wk=∏k,k-1Wk-1+εk-1
(3)
在设计系统噪声为有色噪声的滤波器时,可以将系统噪声Wk-1看成系统状态进行处理,则扩增后的系统方程和量测方程为:
(4)
(5)



(6)
(7)
式(4)~(7)符合卡尔曼滤波基本条件。按照上述动态噪声为有色噪声的卡尔曼滤波方程就可以对小型无人直升机系统飞行状态进行实时估计。
3.2 飞行测量数据零均值化与去趋势项
为了消除系统的直流成分对频域辨识结果的影响,需要对小型无人直升机飞行试验数据进行零均值化处理。飞行数据通过零均值化处理能够提高飞行数据频谱分析的精度,达到防止对数据频谱分析加窗处理而产生的低频频率或干扰频率的目的[15]。
飞行试验数据的均值为:
(8)
零均值化处理:

(9)
飞行试验所采集的数据在稳态条件下,信号会随时间变化偏离基线产生趋势项。这是因为所选用的是MEMS(micro-electro-mechanical system)传感器,这种类型的传感器会产生随温度和时间变化的零点漂移、且传感器频率范围外的低频性能不稳定以及容易受到环境的干扰。因此,本文对飞行数据中的趋势项采用多项式最小二乘法进行处理,原理如下:
原始测量飞行数据序列为{xk}(k=1,2,3,…,n),由于采样数据是等时间间隔的,设多项式函数为:
(4-3)

(10)
满足E有极值的条件为:
(11)
依次取E对ai求偏导,得到一个m+1元线性方程组:
(12)
当m≥2时为曲线趋势项,在实际工程应用中,数据预处理通常取m=1~3来对采样数据进行多项式趋势项消除的处理。本文选取m=2对飞行试验数据进行去趋势项处理。
3.3 飞行测量数据野值的剔除和补正
在飞行试验过程中,外界干扰和系统的偶然跳动,可能使测量结果出现很不合理的跳变,称之为野值。野值的存在将使测量值严重失真,从而降低观测数据的置信度,严重影响数据处理的结果,导致辨识结果的不正确。因此,在进行飞行试验数据预处理时,需要对采集数据的野值进行判别和处理,并使用合理、可信的数据替代野值。本文采用七点二阶前推差分算式。

(13)
(14)
飞行试验数据中往往可能出现连续跳点,并且连续跳点的值都较为接近,使用公式(14)可以判别连续值是否为连续的野值:
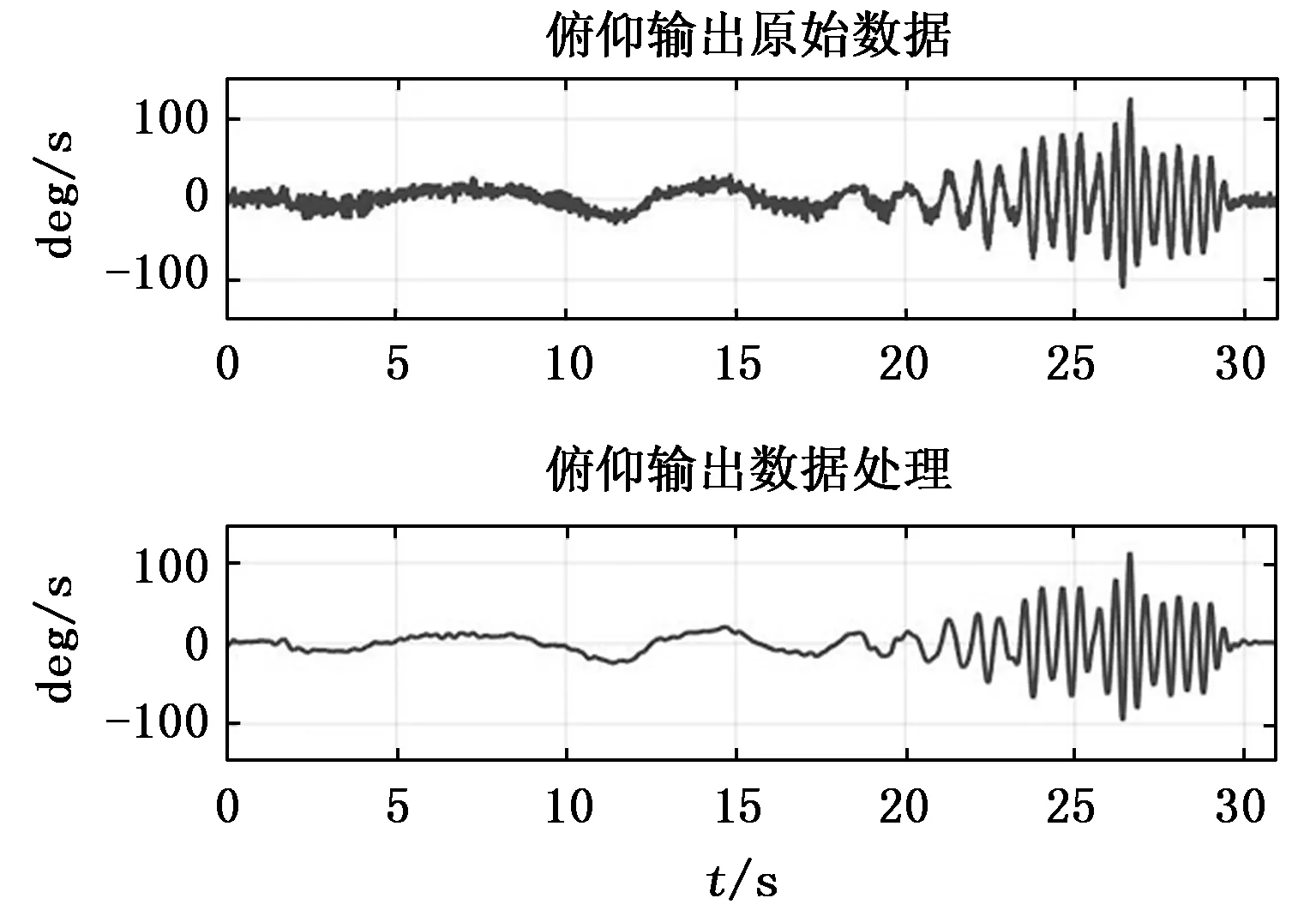
|xk+i-xk| (15) 若已判定数据xk,xk+1,…,xk+m为野值并将其剔除后,需要对所剔除的野值进行补正以确保数据的完整性。 本文采用xk-3,xk-2,xk-1,xk+m+1,xk+m+2,xk+m+3为已知值的拉格朗日插值公式,求出xk,xk+1,...,xk+m的补正值: (16) 飞行试验数据中常含有高频成分,而高频成分主要是由外界和随机干扰引起的,小型无人直升机的工作带宽一般在5 Hz以下,因此应选用合适的数字滤波器对采集的飞行试验数据进行低通滤波。本文选用FIR滤波器设计方法进行数据的低通滤波处理。 由于信号是无限长的,而在进行信号处理时只能采用有限长的信号数据,所以需要将采集到的数据进行截断,由有限长度离散傅里叶变换的特性可知,数据截断会造成频谱泄露,频谱泄露也是能量的泄露,通过对数据加窗函数,可以降低频谱泄露引起的能量泄露,提高FIR滤波器的性能。本文选用汉宁(hanning)窗函数对飞行试验数据进行数据截断处理。 FIR滤波器的差分方程的形式表示为: (17) 其中:x(n)和y(n)分别为输入和输出时域信号序列,bk为滤波系数。 FIR滤波器的冲击响应函数h(n)的z变换为系统传递函数,可表示为: (18) 冲击响应为: (19) 理想FIR低通滤波器的频率响应函数为: (20) 式中,hd(n)为对应的单位脉冲响应序列,并且为无限长序列,因此应对其进行加窗处理,其中,FIR滤波器选用汉宁窗(hanning),表达式为: (21) 加窗函数后得到的数字滤波器为: h(n)=hd(n)w(n) (22) 单位脉冲响应序列由下式可得: (23) 通过飞行试验所采集到的数据会叠加50 Hz工频及倍频等周期性的干扰信号和随机干扰噪声信号。其中,随机干扰信号由于频带较宽,高频成分所占比例较大,在飞行测量数据呈现许多毛刺。为了消弱周期性的工频以及非周期性的随机干扰信号,改善飞行测量数据曲线光滑度,需要对飞行试验数据进行平滑处理。本文采用五点三次平滑法对飞行数据进行平滑处理。其计算公式为: (24) 对小型无人直升机通过飞行试验采集到各个通道的扫频输入和姿态角速率输出信号采用上述所述的数据处理算法,图4~6分别为俯仰通道、倾斜通道和航向通道在扫频输入信号激励下的输出原始信号和数据处理信号结果。 图4 俯仰通道采集原始数据与数据处理结果 图5 倾斜通道采集原始数据与数据处理结果 图6 航向通道采集原始数据与数据处理结果 从验证结果中可以看出,小型无人直升机系统各通道采集原始数据经过数据处理后,有效地减小了测量过程所引入的误差,能够满足小型无人直升机系统模型辨识对飞行测量数据精度的要求。 本文针对小型无人直升机系统模型频域辨识方法的系统激励信号设计和飞行数据处理问题,在已构建的系统中,开展研究工作并有如下结论: 1)根据小型无人直升机飞行特性,设计特定的飞行试验扫频输入激励信号,为系统模型辨识获取尽可能多的频率响应特性; 2)设计了基于有色噪声的卡尔曼滤波器以消除紊流风对飞行状态的影响; 3)采用零均值化、野值的剔除和补正、数据去趋势项、数据的低通滤波和数据平滑的方法剔除飞行采集测量数据中的测量噪声、野值、直流成分和低频分量; 4)将上述方法在小型无人直升机系统俯仰通道、倾斜通道和航向通道中验证,验证结果表明,所设计的数据处理方法能够满足小型无人直升机模型辨识对数据精度的要求,为精确建模提供了较高质量的飞行数据。3.4 飞行测量数据的低通滤波
3.5 飞行测量数据的平滑处理

4 飞行测量数据处理方法验证


5 结束语
猜你喜欢
北京汽车(2021年2期)2021-05-07
军民两用技术与产品(2021年2期)2021-04-13
舰船科学技术(2021年12期)2021-03-29
劳动保护(2019年3期)2019-05-16
振动工程学报(2019年2期)2019-05-13
小哥白尼·趣味科学画报(2019年12期)2019-02-28
岷峨诗稿(2017年4期)2017-04-20
物联网技术(2016年11期)2017-01-12
饮食科学(2016年7期)2016-07-27
科学大众(中学)(2016年8期)2016-05-14
