
基于GPS/INS的无人机物流配送路径识别与控制
2020-06-06 06:56王力锋周万洋
计算机测量与控制 2020年5期
王力锋,周万洋
(百色学院,广西 百色 533000)
0 引言
如今物流配送行业迅猛发展,每天都有成千上万的人进行网购或通过快递寄送物品。数以万计的快递包袱配送已经完全超出工人手工运转的能力,所以经过科技手段的研制利用GPS/INS控制的无人机来进行物流配送,在物流中转站中有不同大小、不同重量、不同易碎程度的快递包裹需要进行分类,这就需要依靠GPS/INS来调整控制无人机的物流配送路线[1]。
无人机的配送路线失误率小、可控制、路径识别能力强,因此可以依赖无人飞机进行快递包裹的转运配送。本文便研究分析基于GPS/INS的无人机物流配送路径识别与控制,GPS/INS是一种导航能力较强的系统,属于复合导航的类型,具有精确度高、反应迅速、便于控制等优点。所以相信在这种高能力导航的监测下无人机的物流配送能力会得到显著的提升[2]。
本文主要分析无人机的物流配送轨迹和无人机进行配送时导航的控制能力。无人机的物流配送轨迹相当于人体中的筋脉与神经系统,无人机受导航控制能力相当于人体中的大脑[3]。只有导航的控制与无人机的物流配送轨迹相互配合才能达到最为理想的状态。所以不仅能需要对基于GPS/INS的无人机物流配送路径识别与控制分别分析计算,还要将这两项内容整体的结合来进行试运转分析。这样的实验效果才会达到能够应用于实际中的层次。
1 基于GPS/INS的无人机物流配送轨迹识别
1.1 无人机横滚运动轨迹识别
无人机在空中进行飞行运动是常见的一种运动轨迹,即无人机横滚运动,当无人机即将进入横滚运动时,会保持一种水平的飞行状态,再通过轻轻地拉杆使飞机具有一定的角度(角度大小随飞机型号而异),从而开始进行无人机横滚运动[4]。综上所述,无人机的横滚运动是指无人机在水平平稳飞行的状态下发生空中周转运动,只在水平方向上发生角度以及位置上的变化,并没有产生明显的轨迹偏移。所以本文在研究无人机横滚运动轨迹的过程中不考虑飞行方向的问题,只考虑无人机飞行横滚角的变化量与速率的因素。假设无人机在三分钟内做出1次横滚运动,那么无人机的横滚运动周期便为三分钟每次,三分钟内的横滚角的变化量为未知量,那么无人机在一定时间内,做出横滚运动的次数便为横滚运动的变化速率,它与无人机横滚运动周期之比为分子无人机横滚运动横滚角变化速率,为分母的数值。得出的数值经过进一步的推算,再用横滚角运动变化速率除以上一步所推出的数值便为无人机横滚运动角度的变化量[5]。
影响无人机横滚运动轨迹的可能性因素还有无人机的飞行速度、横滚的周转位置以及横滚的加速度。下文便逐一的分析以上因素是否能够影响无人机横滚运动轨迹的偏移。
首先本文分析无人机的飞行速度的改变是否会使无人机横滚的运动轨迹发生改变。由于无人机在进行横滚运动之前一定要保持水平状态,并且水平飞行速度要保持水平匀速运动,所以无人机的每一时刻均要保持相同的速度,否则会使无人机的机身不稳定从而导致一定的危险[6]。只有无人机在进行横滚运动的水平速度与无人机没有进行横滚运动的上一时刻速度保持一致才能进行无人机的横滚运动。综上所述,无人机的横滚运动的运行轨迹受无人机飞行速度的影响,只有飞行速度在横滚运动速度产生前与和横滚运动发生过程中保持一致才能进行无人机的横滚运动,否则会使无人机带有危险性从而发生轨迹的偏移。
接着本文继续分析横滚运动的进行位置对无人机横滚运动轨迹的影响程度。根据上文可知无人机在空中进行横滚运动的周期,则可以利用无人机横滚运动的运动周期来计算无人机的横滚运动位置,分析可得无人机没有发生横滚运动时的位置加上横滚运动的变化时间与横滚运动周期的乘积就可以推算出无人机实时的运动位置。根据文中的推理依据可以总结出无人机的横滚运动周转位置会对无人机的很横滚运动运行轨迹产生变化。产生的影响的大小随时间的变化而变化,随周期的长短而确定。
最后本文将分析无人机横滚运动加速度对无人机横滚运动轨迹的影响大小。根据力学中的定理,加速度的产生是受到力的影响,所以在无人机横滚运动的过程中当发生角度上的偏转时,会对无人机周围的空气或其他的物体产生力的作用,又由于力的作用是相互的,所以加速度产生的力会影响无人机进行横滚运动的轨迹。当加速度增大时,由于力的作用同时也增大,无人机的横滚运动轨迹也发生不同程度的轨迹偏转。
1.2 航向运动轨迹识别
无人机的航向运动可以看成水平圆周运动,在运动的过程中无人机保持匀速运动状态可以看做是静止悬空状态。由于飞机在飞行过程中难免会有需要改变飞行状态的时候,但只会在水平方向上发生变化运动,会做出上文提到的横滚运动。因此航向运动轨迹的改变与无人飞机做出的横滚运动有一定的关联,所以下文将分析横滚运动对航空运动轨迹的作用,与航空运动轨迹的识别。航向运动的轨迹整体示意图见图1所示。

图1 航向运动轨迹整体示意图
当无人机在进行水平圆周运动时,根据物理学定理可得,无人机航向运动的轨迹与飞行产生的空气阻力、无人机自身的重力、无人机的向心加速度有关。根据上文可以分析出,当无人机的向心加速度与重力相互作用时会产生无人机横滚运动,飞机的水平飞行速度已知,飞机的横滚运动角速度根据上文也可以得出结果。则无人机再飞行过程中的向心加速度为重力加速度的平方与时间和无人机横滚运动角度的乘积。
利用无人机的向心加速度可以求出无人机航行运动给的轨迹半径进而求得无人机运动过程中的转角速度。无人机航向运动轨迹的半径可以表示为无人机飞行速度的二次方与飞行加速的的比值。得知无人机航向运动的轨迹半径便可以通过无人机飞行速度的数值与无人机航向运动的轨迹半径来获取结果。以上过程所求得的结果均与无人机的横向运动的运行轨迹的相关联,是无人机航向运动轨迹的影响因素[7]。
当需要计算无人机的运动航向轨迹时需要考虑以上因素的影响,并以上文中的结果作为基础来计算无人机航向运动的轨迹。无人机的飞行过程中的改变方向次数是确定飞行轨迹的重要因素,它决定无人机飞行轨迹的半径大小,从而导致飞机的运行轨迹的不同。每次无人机的运行轨迹的该变量的大小也影响着无人机航向运行轨迹,改变量的数值越大无人机的航向飞行轨迹的半径也就越大,无人机的飞行行程也就越远。
飞机的航向运动的轨迹改变次数为航行角度的变化量与无人机转弯角速度的比值再与无人机做水平圆周运动给的运行周期的比值。无人机的航向轨迹改变变化量可以表示为无人机航向角度变化量除以无人机轨迹的改变次数。
如图2所示,最终的无人机航向运动轨迹图可以根据圆心的位置、无人机的角度该变量、无人机的圆周运动半径来决定[8]。

图2 无人机与圆心位置关系
1.3 俯仰运动轨迹识别
无人机的俯仰运动也是无人机的常规运行轨迹之一,仰俯运动的运动原理是由于无人机翼所受的空气流动速度的不同而导致大气压强差从而使飞机机翼发生一定角度的变化产生无人机的仰俯运动,同时也改变了无人机的飞行速度与运动轨迹。
仰俯运动的产生导致三个方向速度变化,分别为左侧速度、右侧速度、上侧速度。但是仰俯运动产生时只改变两个方向的速度,但是上侧速度是每次俯仰运动都会改变的。如下为俯仰运动的速度关系如图3所示。

图3 俯仰运动速度关系
俯仰运动的轨迹位置可以利用上文中的航向运行轨迹的计算方法来进行识别。影响仰俯运动轨迹的因素也与航向运动的影响因素一致,因此此章节不再仔细对仰俯运动轨迹的位置识别做分析计算[9]。
2 基于GPS/INS的无人机物流配送导航控制
无人机的物流配送导航是由GPS/INS两种导航之间相互配合的,技术人员巧妙的利用了两种导航系统的优缺点进行互补配合,GPS导航可以全天无条件的工作并且精确度高,但是GPS导航系统很容易受到外来因素的干扰而影响正常工作。但是INS导航的最突出特点就是抗干扰能力强[10]。无人机结构如图4所示。

图4 无人机结构
本文将使用GPS欺骗干扰的方法来进行对无人机物流配送的控制,使GPS系统向无人机的信号接收系统发送虚假信号,为无人机规划虚假航行路线,使无人机沿着虚假信号所定位的位置航行,这样便控制了无人机的飞行轨迹。导航的控制程序如图5所示。

图5 导航控制程序
无人机的欺骗导航系统主要由信号接收器和状态监测器组成。根据本文第一节可知无人机在航行的过程中会产生不同的飞行状态,当导航系统需要对无人机发出控制命令时需要首先对无人机的飞行状态做出监测。无人机在航行的过程中会以不同的速度飞行,当需要改变无人机的飞行状态,则必须要通过状态监测器观测出速度以及加速度的大小,再通过导航系统的数据计算来对无人机的运行状态做出控制命令。
3 实验研究
3.1 实验目的
本文实验主要目的为利用GPS/INS复合导航系统寻找最适合控制无人机物流配送轨迹的方法与条件,实验中主要通过实验对比的方法使多组的实验结果进行对比,最终选择最佳的方法。实验最终还要利用FDI算法对仿真模拟过程进行计算来确定实验的结果的可行性。
3.2 实验原理
本实验将利用GPS欺骗干扰原理进行实验研究,通过GPS向无人机的信号接收器发送虚假信号从而使无人机沿虚假路线航行,这样便实现了GPS对无人机的航行轨迹的控制。
3.3 实验过程
3.3.1 有干扰与无干扰对比实验
假设无人机从坐标原点开始进行航行状态,沿纵坐标轴飞行四分钟,此时无人机的航向速度达六米每秒,四分钟至六分钟的时间段无人机开始做转弯运动,经过转弯最终的飞行方向为横坐标方向,转弯的过程中加速度大小为0.45 m/s2,完成转弯的加速度便恢复为0,无人机继续以六米每秒的速度航行,做直线匀速运动。沿横坐标正轴方向匀速直线匀速运动一分钟后开始迅速向纵坐标负方向转弯,转弯时的速度为向横坐标转弯时加速的的二倍。转弯后的加速度依旧恢复为0,无人机航行的八分钟到十分钟便沿纵坐标负方向做匀速直线运动。GPS的欺骗设备安放在无人机的起点处,假设无人机与欺骗设备的误差忽略不计,采用直接欺骗的方法与无人机没有收到欺骗干扰信号的航行轨迹进行对比,感测无人机的航行轨迹如图6所示。

图6 提高UAV速度与加速度后受干扰前轨迹图
3.3.2 无人机速度与加速度值增加后与原速度和加速度的对比
本实验的无人机航行过程与上文实验中无人机的航行过程相同,本次对比试验的变量为速度与加速的改变。具体过程与加速度、速度的值如下:假设无人机从坐标原点开始进行航行状态,沿纵坐标轴飞行四分钟,此时无人机的航向速度达十米每秒,四分钟至六分钟的时间段无人机开始做缓慢转弯运动,经过转弯最终的飞行方向为横坐标正向方向,转弯的过程中加速度数值大小为0.8 m/s2,完成转弯的加速度便恢复为0,无人机继续以十米每秒的速度航行,做直线匀速运动。沿横坐标正轴方向匀速直线匀速运动一分钟后开始迅速向纵坐标负方向迅速转弯,转弯时的速度为向横坐标转弯时加速的的三倍。转弯后的加速度大小依旧恢复为0,无人机航行的八分钟到十分钟便沿纵坐标负方向做匀速直线运动。最后本实验采用轨迹融合技术对无人机的航行轨迹进行调整,最终在速度与加速度大幅提升的情况下干扰轨迹图见图7。

图7 欺骗前后UVA轨迹图
3.4 采用FDI算法验证
FDI算法对实验结果的验证具有容错性高、精准度高、实时性能好等特点,利用这种算法不仅能够较为精准的计算出导航系统对无人机物流配送轨迹控制的可行性,还能对实验中的问题进行改正调整。FDI的算法流程如图8所示。
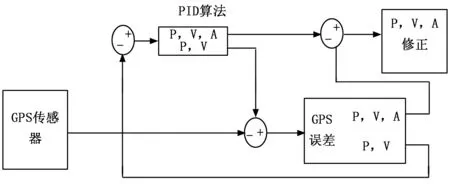
图8 FDI算法流程图
这种算法不仅可以计算出无人机航行的轨迹,还可以对无人机的航行姿态、速度、高度等方面进行计算。进行计算时需要依靠算法系统的软件进行配合,在多个任务模块的同时运作下实现对数据以及信息的处理。计算的同时需要无人机正在空中航行确保收到的信息具备实时性和有效性。针对于GPS/INS符合导航的特征,本文还使用&2检测方法确定信息的有效性。最终利用FDI的计算结果见图9。
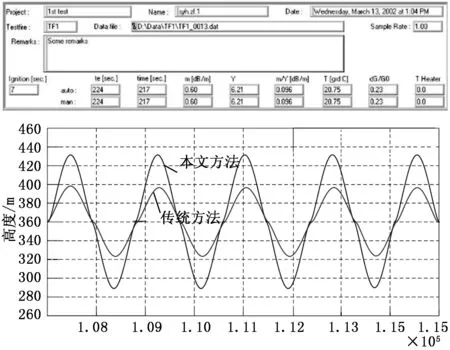
图9 采用FDI算法的高度结果
4 结束语
无人机与GPS/INS复合导航的相互配合,使快递物流的运输效率得到显著的提升,让物流配送业实现了从人工配送到智能配送的大跨越。本文中的第一节内容主要分析了无人机在航行过程中常规的航行姿态的识别与影响因素,主要有无人机的横滚运动、无人机的航向运动、无人机的仰俯运动。根据计算分析,这些无人机的航行姿态均受无人机自身的速度、加速度等因素的影响,三者之间有一定的相似性,研究他们的轨迹影响因素以及识别以便将来能够更好的对无人机进行控制。本文还对GPS/INS复合导航的控制流程做了简要的分析,为第三节的实验夯实了基础。最后本文通过对比试验逐一的分别对无人机有无干扰进行轨迹对比,再通过对比无人机在航行状态下速度与加速度的变化进行对比,选择出最佳的基于GPS/INS复合导航的控制方案。并利用FDI算法对实验结果进行了验证。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
城市轨道交通研究(2022年1期)2022-02-18
今日农业(2021年19期)2022-01-12
科技与创新(2021年24期)2022-01-03
疯狂英语·新读写(2021年6期)2021-08-05
儿童故事画报(2020年7期)2020-08-03
小学科学(2020年6期)2020-06-22
当代陕西(2019年17期)2019-10-08
创新作文(1-2年级)(2017年7期)2017-12-26
