
机场智能驱鸟系统中的自动化拦鸟网设计与实现
2020-06-06 06:56刘玉芬郭志雄陈裕通
计算机测量与控制 2020年5期
刘玉芬,郭志雄,陈裕通
(1.华南理工大学广州学院 电气工程学院,广州 510800;2.广州民航职业技术学院 航空港管理学院,广州 510403)
0 引言
鸟类的飞行大约起始于一亿五千万年前,而人类的飞行则大约是在100年前。显而易见的是,人类因鸟类能在天空中展翅飞翔而激起了对飞行的渴望并最终实现了飞行的愿望。然而需要与鸟类共享一片天空,这就必然会发生矛盾——鸟击(或称鸟撞)[1]。从人类开始进行飞行活动,鸟类对飞行就是一种潜在的危机,但这却又不是唯一的,除此之外还有会闯入到跑道上的动物也会对飞行活动造成危害,如:野狼、野鹿、鳄鱼、兔子等。
在早期,由于天空中只有少量的飞机以较低的速度飞行,同时发动机的噪声比较大,鸟类较早就能察觉到飞机并躲避飞机,鸟撞飞机的风险相对现在比较小,从而对飞机造成的损害一般也就只限于打坏风挡、前缘上撞出凹痕,或者偶尔使机身受到损坏。可见在飞机发展的早期鸟撞只是飞行中的一般危害。随着新一代涡轮发动机的研制应用,飞机飞行的速度加快了,发动机的噪音降低了,鸟类察觉和躲避飞机的机会大大减小,鸟撞变得越来越频繁,造成的损害越来越严重,特别是飞机风挡玻璃、发动机及雷达罩部位的撞击率尤为突出,如图1所示[2]。

图1 飞机鸟撞情形
根据2017年中国民用航空局公布了近6年的鸟撞数据显示,2007~2016年的鸟撞事故征候次数虽然保持在一个相对较低的水平,但在平稳中亦有增长,而鸟撞的次数则在不断地增加且增长的速度更是呈现逐年递增的趋势[3]。
在航空事业不断发展的背景下,航空安全已成为人类关注的重点。根据航空公司里的大部分统计数据得知,绝大多数的航空灾难是在飞机降落与起飞的时候发生的,这种类型的航空灾难之所以发生的原因就在于鸟类在高速飞行时和飞行器发生相撞[4]。由此可见,不管是从鸟击对飞行器安全飞行威胁程度,还是从其发展趋势来看,防止鸟击事件发生的工作是不可放松的,必须寻找有效的办法遏制此类事件的发生,也就是要做到“高效驱鸟”。要实现“高效驱鸟”,必须实现驱鸟设备的智能化、自动化减少因为鸟类适应性引起的鸟击事件,提高驱鸟效果。在众多驱鸟设备中仅有拦鸟网在传统的操作中都是依仗机场场务人员手动张网和收网,其他设备是可以设定时间定时启动的。为了实现驱鸟设备的智能化,解决拦鸟网自动布网是亟需解决的课题。机场智能驱鸟系统中的自动化拦鸟网用智能控制代替传统的手动操作,不仅提高了拦鸟网工作的效率,降低了机场场务人员的工作压力,更好的实现了智能化驱鸟的目标。
1 系统总体方案设计
所研制的机场驱鸟联动系统主要由信息采集控制的终端节点模块、路由节点传输模块、网关远程传输基站模块、服务监控中心以及联动驱鸟设备五部分组成,其中联动驱鸟设备包括煤气炮、钛雷炮、拦鸟网、二踢脚、语音驱动器等。系统框图如图2所示。各信息采集传感器通过Zigbee短距离无线通信技术构成自组网络,最终实现整个机场区域无盲点全覆盖。驱鸟设备按照各自功能效果特性及机场地理位置按层次分布,实现整个机场的高效驱鸟。各驱鸟设备的状态通过终端节点模块采集设备当前状态,然后通过ZigBee短距离传播技术传输到网关模块,网关模块对信息数据进行处理解析后通过GPRS网络上传到监控中心。同时监控中心对驱鸟设备发送启动信号,先通过GPRS传送到网关模块处理分析后经ZigBee网络送达终端节点,启动驱鸟设备。

图2 系统总体组成框图
终端节点硬件部分由无线通信模块、传感器模块、电源模块、处理器模块等四部组成,如图3所示。这四个模块会组成一个小盒子嵌入到设备装置里面与设备进行协同工作。传感器模块负责监测设备,将采集到信号传入模数转换模块并得到数字信号。处理器模块接收到数字信号后便对其进行处理,包括能量计算、任务调度、设备控制以及功能协调等操作。无线通信模块则负责与其他节点(路由节点与网关)进行通信,并最终实现监控中心与各终端节点的正常通信。

图3 系统终端节点结构
Zigbee无线传感器网络的拓扑结构包括星型拓扑、树型拓扑以及网状型拓扑[4],根据机场场内的大部分驱鸟设备都布设在飞机跑道两侧的情况,提出了利用若干个星型拓扑来组建网状拓扑的结构形式,在实际的机场跑道两侧上每大约100米就布设一个驱鸟设备,而在鸟撞事件多发区域如飞机起飞与降落点则更是会缩小到50米左右布设一个,如图4所示。
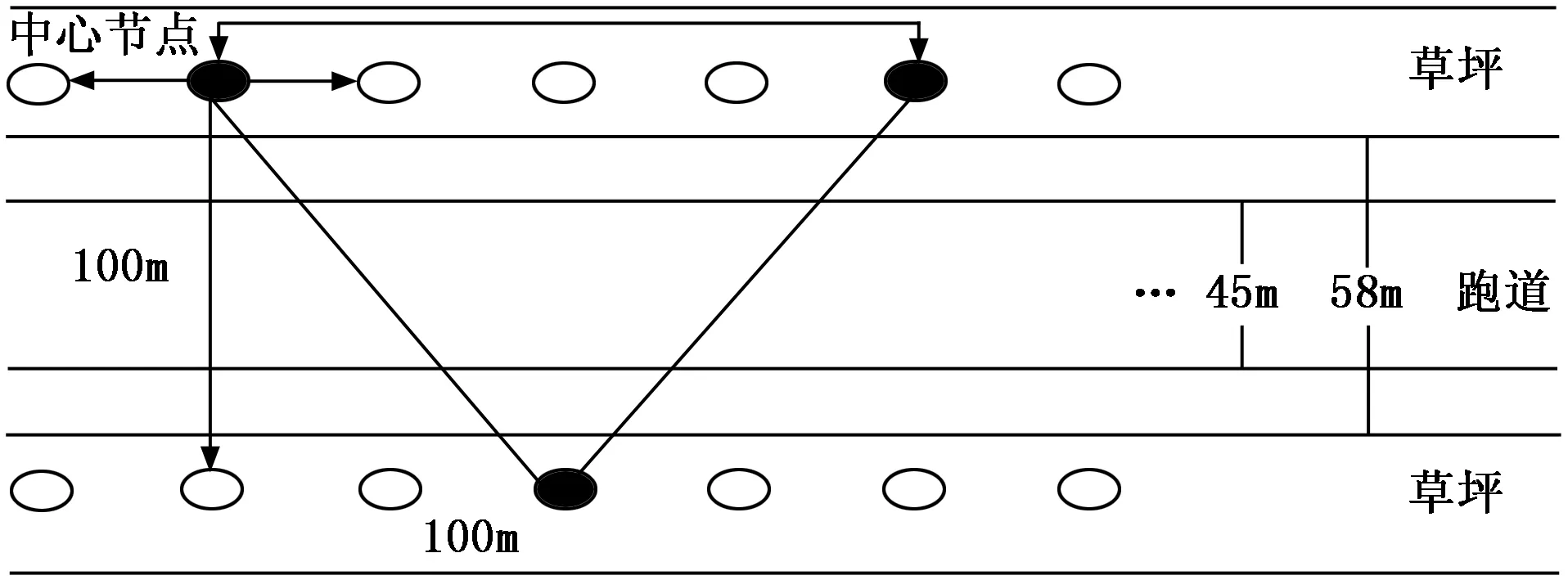
图4 组建无线传感器网络的示意图
同时以STM32为核心处理器并结合CC2530、CC2591以及GPRS模块构建驱鸟智能系统的网关。最终实现移动通信网络(GPRS)与Zigbee网络的混合方式进行组网,以实现有效覆盖整个机场区域的目的。在网络的覆盖区域内,只需要将煤气炮、钛雷炮、二踢脚、拦鸟网、摄像头及语音驱鸟器等驱鸟设备接入网络,即可实现鸟情状况、设备状态的信息查询以及相关控制命令的发送等功能。
2 自动化拦鸟网设计与实现
拦鸟网的作用是用于拦截低空飞行的鸟类到达跑道区域,而非以捕捉跑道两侧的鸟类为主要目的,其一般由网面、支撑杆及紧固栓绳等构成。通常情况下,拦鸟网的设置应兼具拦截与警示鸟类的功能,为此,网面和支撑杆应选用与环境具有明显差异的颜色,如红色或橙色。具有警示效果的网具不仅利于场务人员巡视,更具有升降带内障碍物标示的效果。但是场内现有的拦鸟网基本采用了人工布网的方式,难以实现与其它设备的联网,因此需要对其进行升级改造以实现其自动化的控制。
2.1 自动化拦鸟网设计
拦鸟网中的电机使用了57HS22,该电机为2相4线的57步进电机[5],能够满足轻量级的拦鸟网张网要求。电机在预定的轨道上正反转的转动即可实现拦鸟网的张网和收网,其设计如图5所示。

图5 自动化拦鸟网结构示意图
由于在轨道上加装了限位开关,因此可获取拦鸟网的工作状态并实现对电机正、反转及停转的合理控制。此外,轨道布设决定了拦鸟网的效率,因此在布设时应尽量避免呆板的“一”字形的排序,可在某些区域有意地进行部分前后交叉。需特别注意的是,在鸟类活动较多的地带及飞机着落、起飞拉升点两侧应重点架设拦鸟网以加大对这些敏感区域的防治力度。
2.1.1 电机控制设计
电机控制使用了TB6600进行控制,其连接线路如图6所示。TB6600是一款专业的两相步进电机驱动器,能够实现电机的正反转控制。在驱动器上有3位拨码开关,能够选择7档的细分控制(1,2/A,2/B,4,8,16,32),另外三位拨码开关则可选择8档电流的控制(0.5A,1.5A,2A,2.5A,2.8A,3A,3.5A),适合用来驱动57、42型两相、四相混合式步进电机[6]。

图6 TB6600连接图
TB6600驱动器的输入信号端有三路,分别是步进脉冲信号PUL+、PUL-,方向电平信号DIR+、DIR-,脱机信号EN+、EN-。设计中,使用共阳极接线方法,也就是将PUL+、DIR+接到控制器CC2530的电源端,脉冲输入通过PUL-接入,方向控制信号通过DIR-接入。当PUL-接收到脉冲时工作,高电平有效,无脉冲锁定电机并自动半流,DIR-高电平输入为正转,低电平输入时为反转。相关代码如下:
void loop()
{
if (KeyScan())//如果检测按钮为高电平,步进电机则转,否则不转
{
if(KeyScan12())
StepperMotor(false, true, 3200);//控制步进电机是否脱机、方向、步数;第一个参数:ENA---脱机状态,true为脱机;第二个参数:DIR---方向控制,true为正转,false为反转;第三个参数:steps---步进的步数,若steps为0,则电机上电电磁锁死,不转。
else if(KeyScan34())
StepperMotor(false, false, 3200);//反转
else
StepperMotor(false, false, 0);//停转
}
else
StepperMotor(false, true, 0);//电机停转
}
2.1.2 传感器选择
限位开关的选择,考虑到使用环境是户外,并且是没有遮挡空旷的机场环境,在选择限位开关时要考虑环境对限位开关影响的因素,需要把使用温度,使用湿度,触发的条件考虑进去。同时在比较恶劣的环境下,接触式的限位开关比非接触式的限位开关在机械运行中更加直观。因此确定了在机械设备运动的部件上安装限位开关,其对应的运动轨迹的固定点安装极限位置的挡板,当限位开关的机械出头碰到挡板时候,反馈一个信号到控制器中,对电机运行状态进行改变。
在机场这样的环境下使用的限位开关选择时触发的灵敏度不能太高,如果一阵风吹过就能触发的更是不能考虑。
根据伯努利方程得出的风-压关系,风的动压为:
wp= 0.5*r0*v2
(1)
其中:wp为风压(kN/m2),r0为空气密度(kg/m3),v为风速(m/s)。
把预设环境定位最恶劣,也就是说保证限位开关在最高风速下也不会误触发,也就是12级飓风的环境下限位开关也不会出现误触发情况。由于空气密度(r0)和重度(r)的关系为r=r0*g,代入式(1)得到:
wp= 0.5*r*v2/g
(2)
在标准状态下(气压为1013 hPa,温度15℃),空气重度r=0.012 25 kN/m2,维度为45°处的重力加速度g=9.8 m/s2,最高风速目前没有出现超过100 m/s的飓风,得到wp≈6.25 kN/m2,限位开关体积小,受力面积不到万分之一平方米。因此在选择限位开关时使用环境符合-10~80℃,使用湿度符合≤95%RH,动作力(为了从自有位置移到工作位置所必须给驱动杆施加的力)要大于0.6 N,同时限位开关要求能防水,本设计选择了欧姆龙的HL-5030型号的限位开关,外形图如图7所示。在拦鸟网的杆上安装限位开关可以用来检测网是否已正常展开,从而让场务人员能够清楚地了解各拦鸟网的实际情况。特别是在恶劣天气,经常会有拦鸟网被大风刮至跑道的情况,为此设计中增加了限位开关以达到监测拦鸟网状态的目的。除此之外,限位开关在拦鸟网自动布网的过程中起到定位的作用,也就是依仗限位开关给予信号,使电机停止运转。

图7 限位开关外形
限位开关与CC2530的连接电路如图8所示,图中SW即为限位开关,P2.1是CC2530的一个引脚。当布网或收网时会触碰SW微动开关,从而使P2.1引脚从原来的高电平变为低电平。

图8 限位开关检测电路
由于限位开关与大多数的机械按键一样,在开关按下的时候并不会马上从原来的高电平变为低电平,而是如图9所示有一个抖动的过程,因此CC2530在检测限位开关是否按下时需在第一次检测到有按下按键时延迟一定时间,然后再判断是否按键真正按下,即按键消抖。

图9 限位开关机械特性
2.2 自动化拦鸟网软件设计
自动化拦鸟网的位置需要限位开关确定,所以在拦鸟网控制中,限位开关很重要,下面是限位开关检测流程图,如图10所示。

图10 限位开关检测流程图
限位开关S1配置如下:
P0SEL & = ~0X02; //设置P01为普通IO口
P0DIR &= ~0X02; //按键在P01口,设置为输入模式
P0INP &= ~0x02; //打开P01上拉电阻,不影响
检测相关代码:
#define KEY1 P0_1 //KEY1为P0.1口控制
#define KEY2 P0_2 //KEY2为P0.2口控制
uchar KeyScan12(void)
{
if(KEY1==0)
{
Delayms(10);
if(KEY1==0)
{
while(!KEY1); //松开检测
return 1; //有开关按下
}
……
}
return 0; //无开关按下
}
自动化拦鸟网的系统机构及硬件搭建好后需对其进行相关的程序设计,其程序流程图如图11所示。

图11 TB6600连接图
CC2530上电后首先对其外设进行初始化,然后搜索Zigbee网络。若发现有Zigbee网络则发送加入网络的申请并等待请求响应,如允许加入网络,则终端节点发送绑定请求申请并等待路由节点或协调器节点的绑定响应。成功入网后CC2530就进入任务执行的循环,若无触发命令就每隔一段时间检查限位开关是否有被按下,同时对电池进行电量检测并上传数据给协调器。若有触发命令,则自动化拦鸟网终端节点就会判断是命令类型,然后根据命令对电机进行正反转的控制。两个电机开启后CC2530会每隔一段时间判断限位开关是否有被按下,从而实现自动化布网的功能。
3 实验测试
由于外场的驱鸟设备与服务器间有一定的连接距离,因此必须进行远程的控制测试以验证设计的可行性。
3.1 设备通信测试
当USB线与下位机连接好后,在主界面通过串口连接功能实现软件上的连接。开启相应的设备后,可在串口打印窗口观察到发送命令数据,这表明串口已正常工作,并且能与下位机通信,当USB与下位机断开连接后,在软件上无法实现软件连接,这符合预期。
3.2 设备控制测试
拦鸟网的控制界面如图12所示,其图标上方的两个指示灯分别表示拦鸟网左右两个支架的状态:灯亮表示立杆到达两端,灯灭表示收网,闪烁表示支架正在展开或收紧。拦鸟网控制模块关机时,设备状态为“关闭”,拦鸟网图标为灰色;控制模块开机时,拦鸟网图标为黄色。点击“刷新”按键,获取拦鸟网的工作状态;点击“立网”和“放网”按键可控制拦鸟网立起和放下;点击“总停”按键,其旁边的指示灯亮或灭,表示拦鸟网总停或没有总停。由测试结果表明,该系统已实现了拦鸟网的远程收放控制功能。

图12 拦鸟网控制界面
4 结束语
针对机场特殊环境设计了基于物联网的机场驱鸟联动系统方案,并在此基础上解决了现有拦鸟网需由场务人员进行人工布设的问题,实现了机场场内所有驱鸟设备的自动化目的。针对自动化拦鸟网,对其硬件与软件作了设计,实现了拦鸟网的自动化布设功能,为机场场内驱鸟设备联网打下坚实的基础。
猜你喜欢
学与玩(2022年9期)2022-10-31
汽车实用技术(2022年16期)2022-08-31
防爆电机(2022年4期)2022-08-17
中国新技术新产品(2022年5期)2022-06-21
防爆电机(2022年3期)2022-06-17
防爆电机(2022年2期)2022-04-26
文苑(2020年12期)2020-04-13
小太阳画报(2019年1期)2019-06-11
科学与财富(2017年24期)2017-09-06
科技创新导报(2016年4期)2016-11-19
