青海省新一代BDS高精度基准服务平台的构建
2020-05-23 06:06李延龙张生鹏张永荥
全球定位系统 2020年2期
李延龙,张生鹏,张永荥
(青海省基础测绘院,青海 西宁 810001)
0 引 言
为满足国家政府部门、各种用户对测绘成果资料的不同需求,促进地方测绘地理信息事业发展,全国各省市大力推动现代测绘基准体系的应用,在位置服务领域上取得了显著成效.维持测绘基准体系需要精确的框架位置坐标,目前高精度定位主要依据全球卫星导航系统(GNSS)卫星定位来实现,包括精密单点定位(PPP)和差分定位(RP)两种模式, PPP需要精密星历、卫星钟差等产品方能达到厘米级的定位,并且需要一段时间收敛,满足不了大众用户对实时定位的需求,目前实时定位主要采用差分定位,各个省通过建立连续运行卫星参考站(CORS)来实时不间断地接收卫星观测值并通过数据中心进行解算,最后将改正数播发给用户从而高精度定位服务,它改善了传统的作业方式,大大地提高了作业的效率,节约了作业成本,目前各个省市都在积极完善CORS服务系统,在广东、广西、江苏、浙江、河南等地都已经开展了针对CORS的服务应用与推广.提出了基于CORS位置云服务的高并发技术研究[1],针对CORS服务平台提出了设计思想以及系统功能特色,利用省内现有CORS资源,对CORS系统优化整合[2],针对用户管理模块研究开发了管理服务平台,并针对用户量增大的问题重新设计了播发服务框架[3],基于CORS提出了高精度事后服务应用[4].然而目前CORS系统主要还是以垂直服务模式为主,即CORS解算服务器直接与用户接收机通信并发送改正数据,同时还需要处理用户的业务请求以及其他数据请求的功能,在此过程中存在以下几个问题:1)是在数据传输方面由于用户可以通过发送初始坐标来直接访问解算服务器,然后服务器直接将改正数据发送给用户,在这一过程中存在基准站数据解算服务器泄密的风险;2)用户需要对接收的观测值数据进行格式转换、坐标转换等处理后方可使用,不利于非测绘行业用户的推广使用.本文详细介绍了基于青海的北斗卫星导航系统(BDS)高精度服务平台的构建过程;3)目前人民不仅对位置服务的精度有应用依赖,对位置服务的广度也不断提高,许多新的市场需求也在急剧增加,然而CORS系统提供的服务单一,没有充分挖掘CORS的服务潜力,不能满足大众应用领域对高精度位置服务的深度和广度的需求.
青海省卫星导航连续运行基准站综合服务系统(QHCORS)由青海省藏区卫星导航综合服务系统和青海省东部地区BDS地基增强系统构成[5].QHCORS系统包含全省80座连续运行基准站,通过现代通讯网络为青海省提供高精度、高效率、全覆盖的测绘基准服务.目前QHCORS管理平台采用Trimble公司研发的Pivot软件,该软件能进行基本的CORS网管理和数据处理,为实时测量用户提供包含虚拟参考站数据的RTCM电文,从而实现实时动态(RTK)测量[6].但对于CORS管理还存在以下不足:管理员对注册使用的CORS用户的管理操作都是直接操作底层的SQL Server数据库,这样存在安全隐患,并且操作效率很低;不能够提供实时的坐标转换、GNSS基线网平差等功能,使得用户作业进程变慢;没有更充分的开发基于QHCORS的衍生服务[7],使得QHCORS的服务对象主要是测绘行业,其他行业对QHCORS的应用相对较少[8].针对上述问题,本文提出了一套全新的CORS服务系统架构,解决了基准站涉密数据安全性以及用户高并发请求的问题,构建了青海省高精度基准服务平台.
1 平台设计方案
1.1 平台目标
本文构建了一个包含BDS基准站管理服务系统、BDS基准站空间环境监测系统和BDS基准站自动化变形监测系统三个子系统的QHCORS高精度基准服务平台.基准站管理服务系统主要包括对QHCORS运行状态进行实时监控、异常基准站维护、用户分类管理、实时定位及事后定位,空间环境监测系统主要包括实时电离层空间环境产品的生成,及未来数小时内的短临空间环境状况预报等功能,自动化变形监测系统可提供全自动化、全天候、高精度变形监测服务,用户可自主接入基准站和监测站,并对监测站的变形数据进行实时和长时分析,统计监测点位移速率、实时位移以及累计位移等,对可能发生灾害的监测点进行及时预警[9].本平台提高了QHCORS的运维服务管理水平,进一步完善了之前的系统,推动了QHCORS行业的发展[10].
1.2 平台架构
青海省BDS高精度基准服务平台采用三层B/S架构,基于ASP.NET技术开发系统应用平台,整个系统分为表示层、逻辑层和数据层[11].
如图1所示,系统的逻辑结构主要由QHCORS基准站、Pivot服务器和青海省BDS高精度基准服务系统以及各种类型的用户(包括RTK测量用户、实时动态码相位差分技术(RTD)用户以及多终端管理用户等)构成,它们通过有线(以太网)和无线(通信链路)进行实时链接和数据传输.
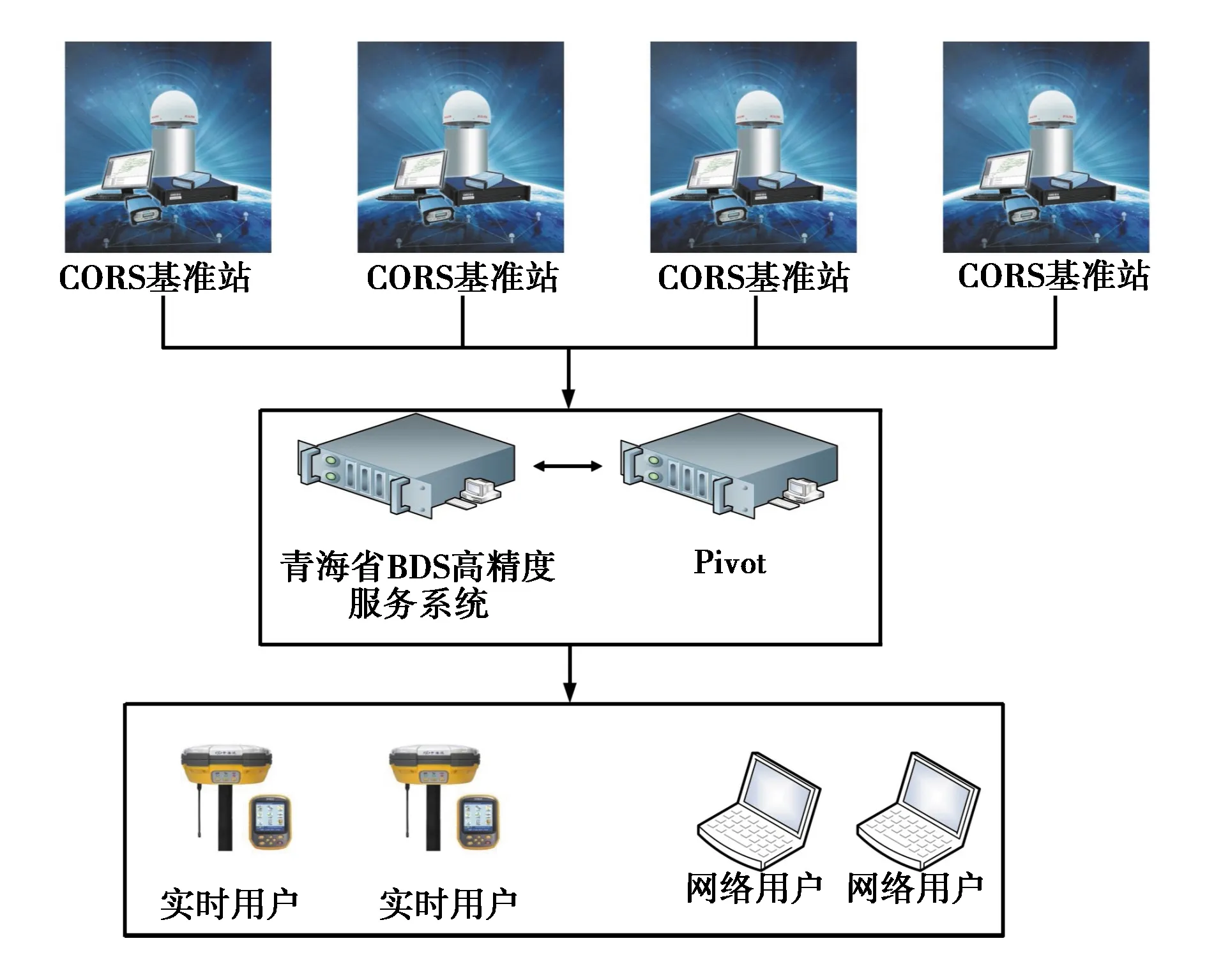
图1 系统逻辑结构图
青海省BDS高精度基准服务系统提供基于VRS技术的CORS运维管理功能,在Pivot服务器与接收机用户/WEB用户之间加入一台服务器,用户可直接与该服务器连接并享受各种服务.其网络拓扑图如图2所示,CORS基准站与服务器之间通过专线网络进行连接,网站服务器和Pivot服务器处于同一局域网内,通过路由器进行数据交换,GIS用户、RTK用户和移动端用户通过无线通讯基站向服务器发送请求,浏览器用户则直接通过以太网向服务器发送请求.

图2 网络体系结构图
1.3 平台安全防护
数据中心的数据输入端、涉密计算机内网、差分改正数输出端以及数据播发服务端安全升级改造主要工作分别如下:
1) 基准站数据输入端安全升级改造,
①在基准站专网和涉密计算内网之间(数据输入端)部署单向光闸设备和基准数据格式规约软件,对实时数据流的内容进行规约和审计,实现基准站合规观测数据流,将基准站合规观测数据流、文件单向导入到涉密计算内网进行计算;
②对于涉密计算机数据处理需要的精密星历文件和DCB文件等需要通过互联网进行下载,将下载的国际GNSS服务(IGS)数据文件通过防火墙传输至IGS数据导入前置机;
③数据解算所需IGS数据文件同样通过基准站专网和涉密计算内网的单向光闸导入涉密计算内网进行数据处理.
基准站数据输入端安全升级改造后架构如图3所示.
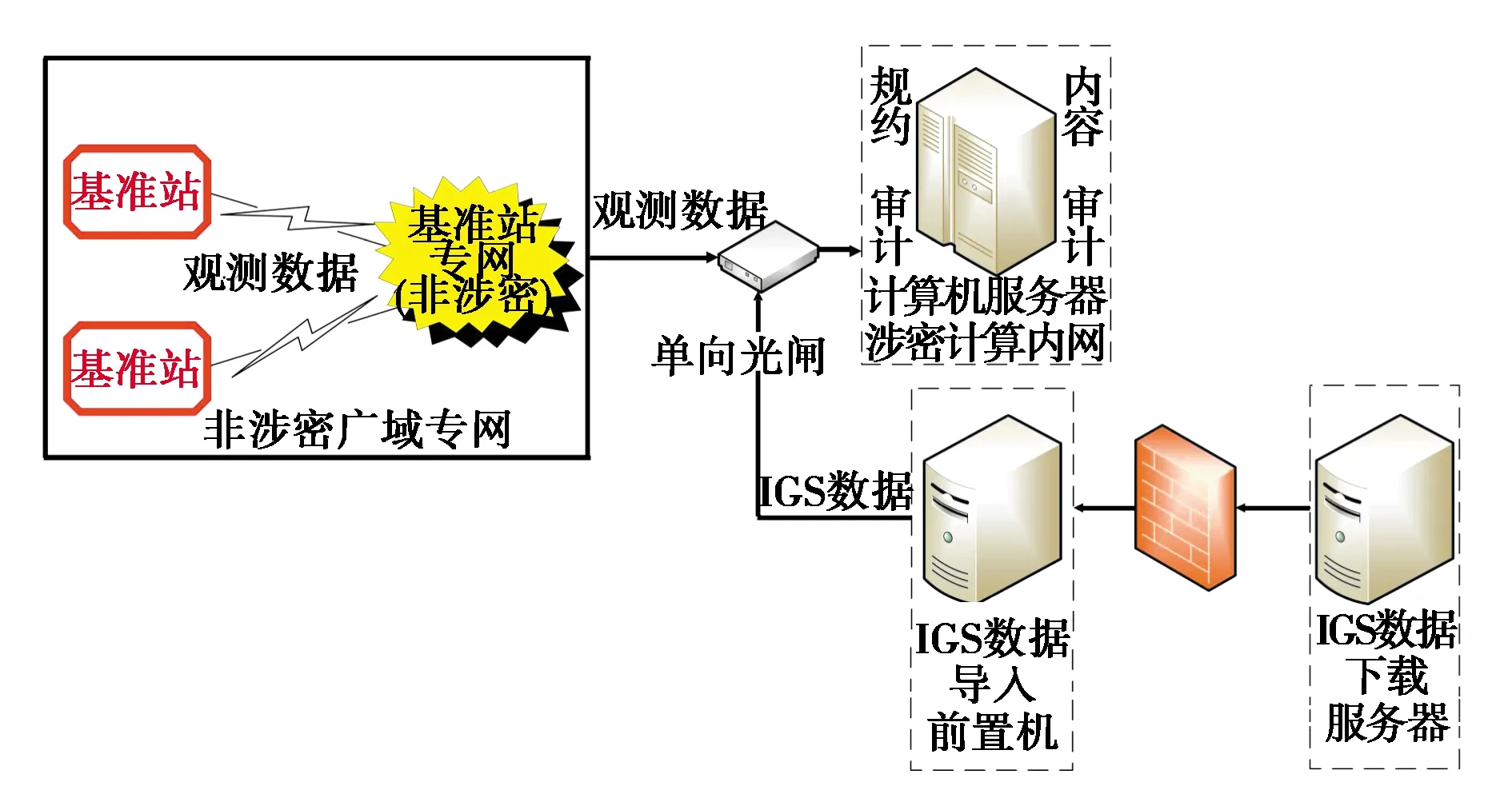
图3 输入端架构图
2) 涉密计算机内网安全升级改造
①在涉密计算机内网和数据播发交换子网(产品播发输出端)之间部署数据产品内容审计软件和单向光闸设备;
②基准站观测数据在涉密计算网进行数据处理后,产出格网化差分改正数,经内容审计软件审核后,发送至数据播发交换子网和数据播发服务子网,实现非涉密合规数据产品单向导出到非涉密网.
涉密计算机内网安全升级改造后架构如图4所示.

图4 内网安全改造架构图
3) 差分改正数输出端安全升级改造
①数据播发交换子网负责对数据产品再次审核并去除内容审计软件植入的软件标签,数据播发服务子网负责用户交互服务;
②数据播发交换子网和数据播发服务子网之间通过防火墙进行安全保护.
差分改正数输出端安全升级改造后架构如图5所示.
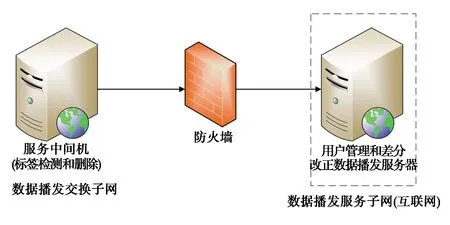
图5 输出端改造架构图
4) 数据播发服务端安全升级改造
① 数据播发服务端(互联网)设置产品播发服务器,安装专业软件实现用户管理和差分改正数的播发等功能;
② 流动站用户作业保持原有交互模式不变,即在作业时将其概略位置上传到数据中心,数据中心将差分改正数发送至用户.
数据播发服务端安全升级改造后架构如图6所示:
最终改造完成的省级数据中心节点主要由基准站专网(非涉密广域专网)、涉密计算内网、数据播发交换子网(非涉密网)、数据播发服务子网(互联网)等组成,以满足安全改造相关要求.
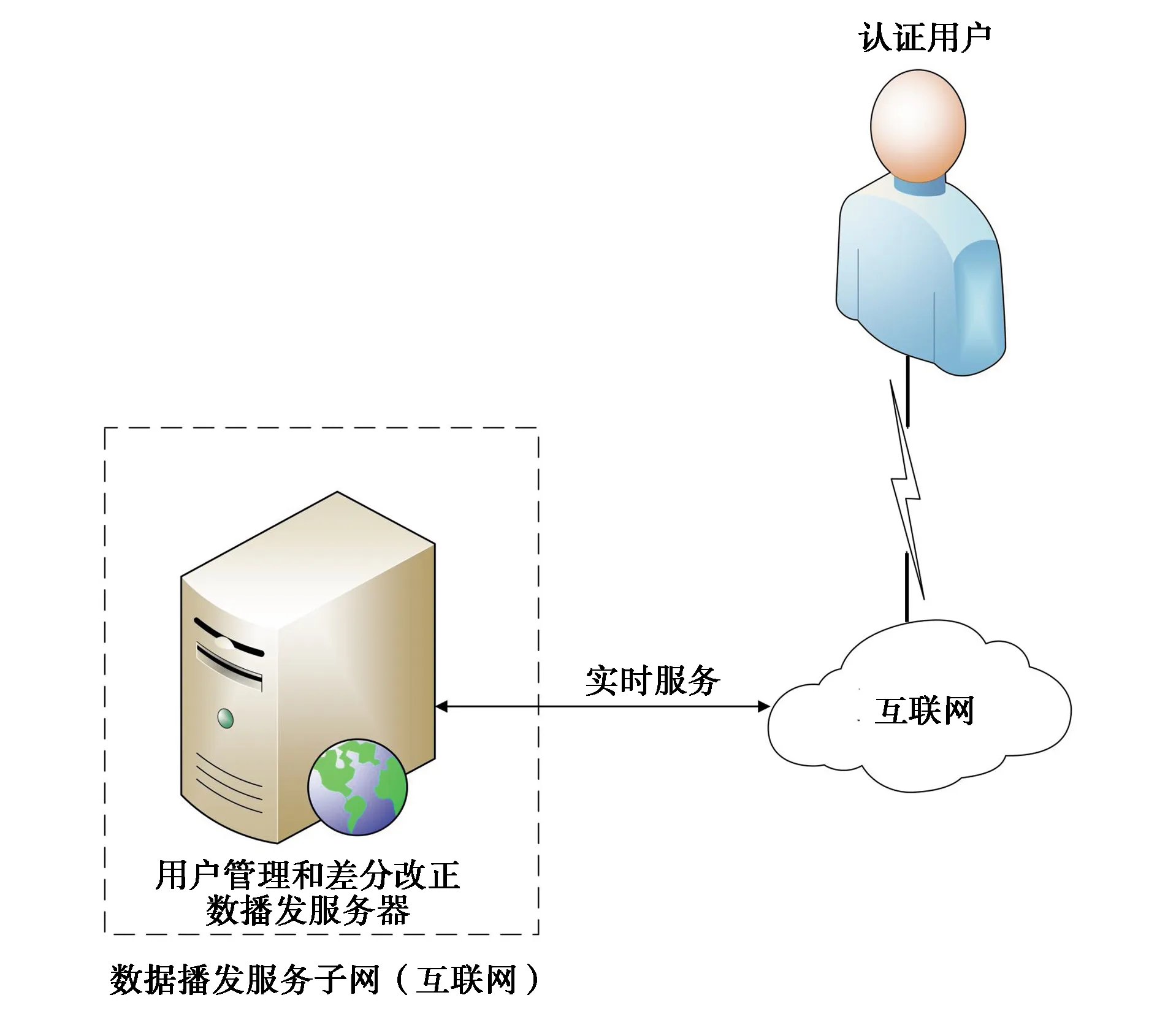
图6 数据播发服务端安全升级改造架构图
2 平台主要功能设计与实现
本平台的实现主要利用ASP.NET和AJAX(Asynchronous JavaScript and XML)技术,在界面设计上遵循了简单明了原则、方便使用原则、用户导向原则.
2.1 管理服务模块
用户管理功能模块主要由用户注册、权限管理、计费管理、报表输出、轨迹显示等组件组成[12],如图7所示.用户注册组件实现WEB用户的注册功能;权限管理实现WEB用户的权限分配功能;计费管理组件完成对用户费用的管理,并对用户的单位账户进行监控;报表输出组件实现用户信息的查询报表输出功能;轨迹显示组件实现对用户实时位置的显示功能,并对用户作业区域是否合法进行监控.
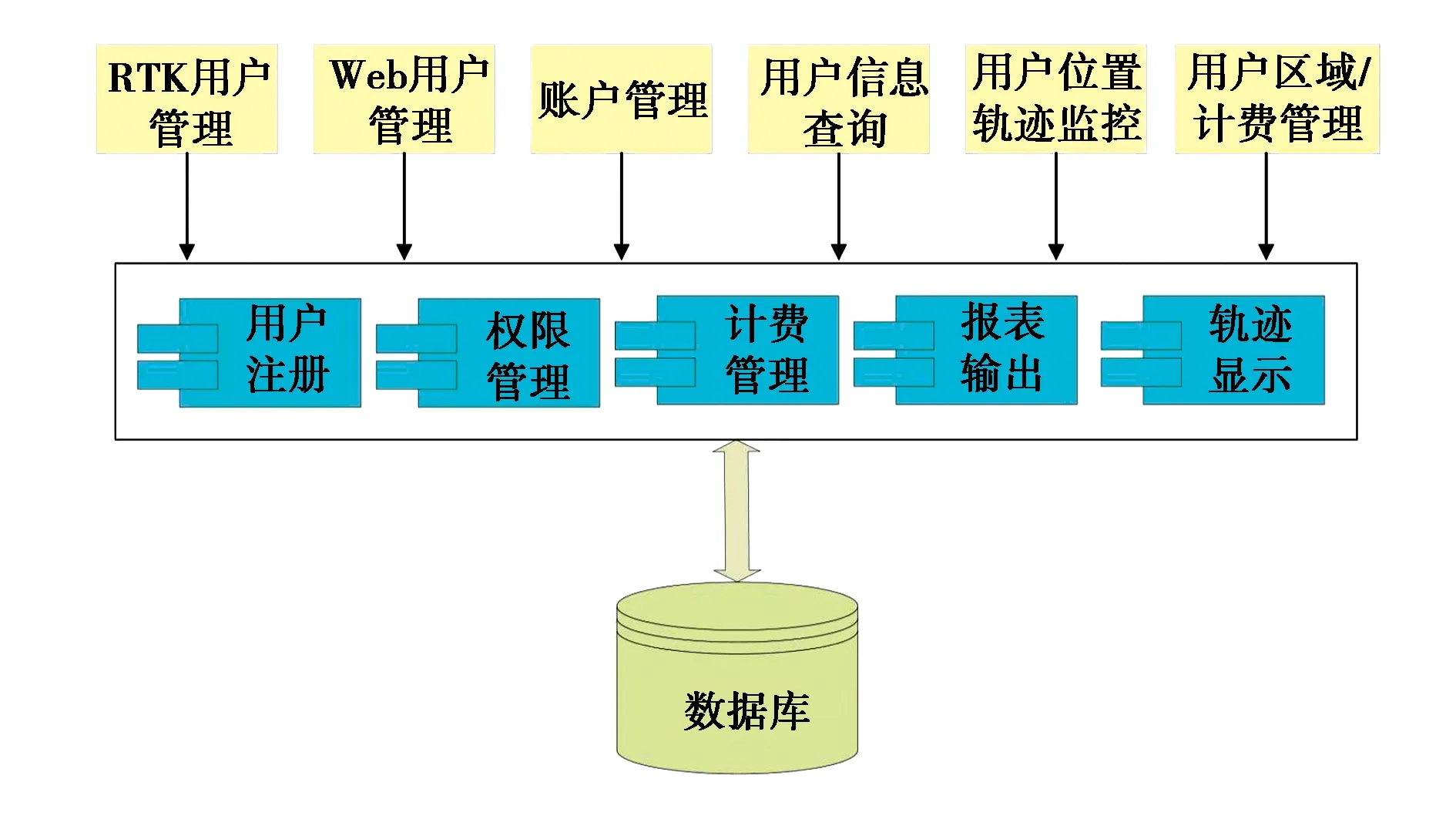
图7 用户管理模块图
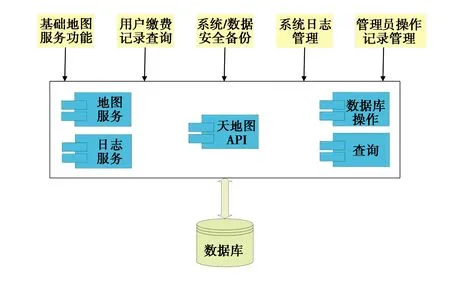
图8 系统管理模块图
系统管理功能模块的程序实现主要由地图服务、天地图API、数据库操作、日志服务、查询等组件组成,如图8所示.地图服务组件采用天地图API组件,实现用户位置在地图底图上的实时位置显示,并具有放大、缩小、漫游及测距功能;数据库操作及查询组件完成对数据库中信息的读写、统计查询,实现用户缴费记录查询、系统查询统计功能;日志服务组件实现对管理员操作信息的记录功能.
2.2 基准框架维持模块
现代坐标框架是动态或者准动态的.从地球动力学的观点来看,地面点坐标因板块运动、地壳形变、潮汐负荷等因素的影响而发生变化,因此对于一个高精度的坐标系必须考虑该坐标系的维持问题,即需按一定的复测策略保证站坐标和速度的不断精化.根据范围、实现及应用的不同,可以把地球参考框架的维持简单地分为全球参考框架维持和区域参考框架维持.
利用GNSS技术建立地心坐标参考框架可采取如下基本步骤:
1) 建立观测台站,进行空间测量.测站的选取可参照ITRF参考站标准.一般而言,高精度的测站位置仅需短期观测即可得到,但测站速度必须累计至少一年的观测资料;
2) 根据协议约定,按照参考框架的基准定义采用国际推荐的模型参数、常数、对观测数据进行处理,解算测站坐标及EOP参数;
3) 建立测站坐标及EOP参数序列,获得各种技术的周解SINEX文件,实施技术内组合得到每种技术的长期解;
4)检验并置站间局部联系的可用性及准确性,联合不同技术的长期解进行技术间组合,获得技术间组合的长期解,从而确定参考框架.
2.3 坐标转换模块
由于目前正处于CGCS2000坐标系过渡期间,许多测绘成果都需要从以前的参心坐标系下转换到目前的地心坐标系下,本系统基于此设计了一套坐标转换模块,提供丰富的坐标转换服务.
将基于CGCS2000坐标系平面坐标成果(x,y)2000,根据已有的转换参数,经平面四参数转换模型转换后得到基于CGCS2000椭球的独立坐标系(x,y)dl.

(1)
式中:x0,y0为平移参数,单位为m;α为旋转参数,单位为s;m为尺度参数,单位为ppm(即10-6);x1,y1为源坐标系下的平面直角坐标,单位为m;x2,y2为转换后目的坐标系下的平面直角坐标,单位为m.
将CGCS2000坐标系空间直角坐标成果(X,Y,Z)2000,根据已有的七参数经空间七参数转换模型转换后得到1980西安空间直角坐标(X,Y,Z)80,将(X,Y,Z)80转换为大地坐标形式(B,L,H)80,将得到的1980西安坐标系成果(B,L,H)1980取各点的大地经度L及大地纬度B,以3°带投影按高斯正算公式投影得到平面x,y坐标,并对y坐标加带号,得到各点1980西安坐标系下的国家统一坐标.

(2)
(3)
式中:x0,y0,z0为平移参数,单位为m;εx,εy,εz分别为x,y,z轴角度旋转角度,单位为s;m为尺度缩放参数,单位ppm(即10-6);Xs,Ys,Zs为源坐标系下的空间直角坐标,单位为m;Xt,Yt为转换后的空间直角坐标,单位为m.
Zt独立坐标系与1980西安坐标系没有直接关系,他们的转换需要先过渡到CGCS2000坐标系下,再进行转换.对于基于CGCS2000独立坐标系下的GPS点成果,采用如下途径转换至1980西安坐标系下:
1) 将基于CGCS2000独立坐标系下的GPS点坐标(x,y)按高斯投影反算公式,得到基于CGCS2000坐标系下的大地坐标B、L,并结合该点的大地高H,得到各点的基于CGCS2000坐标系的大地坐标(B,L,H)2000;
2) 根据已有的转换参数,将各点基于CGCS2000坐标系的大地坐标(B,L,H)2000换算至1980西安坐标系下的大地坐标(B,L,H)1980;
3) 将得到的1980西安坐标系成果(B,L,H)1980取各点的大地经度L及大地纬度B,以3°带投影按高斯正算公式投影得到平面x,y坐标,并对y坐标加带号,得到各点1980西安坐标系下的国家统一坐标.
最后,利用区域似大地水准面格网模型和双线性内插的方法计算出待转点位置上的高程异常并计算出正常高.
2.4 空间环境监测
实现系统完好性监测,实时获取系统运行状况,及时以短信、邮件等多种形式预警管理员和相应的用户并做出应对和处理,包括对基站情况、软件硬件网络情况、用户实时计费情况、用户作业情况等进行实时监测[13].
空间环境监测需要实时求得所在区域的电离层电子密度变化图,GNSS 观测量主要包括码和载波相位两类观测,GPS基本观测方程为

(4)
(5)
图9所示为基于像素基的电离层层析原理图,电子密度重构是典型的求反问题,即基于观测到的斜向电离层总电子含量(STEC)来重构待反演区域的电子密度三维分布信息.
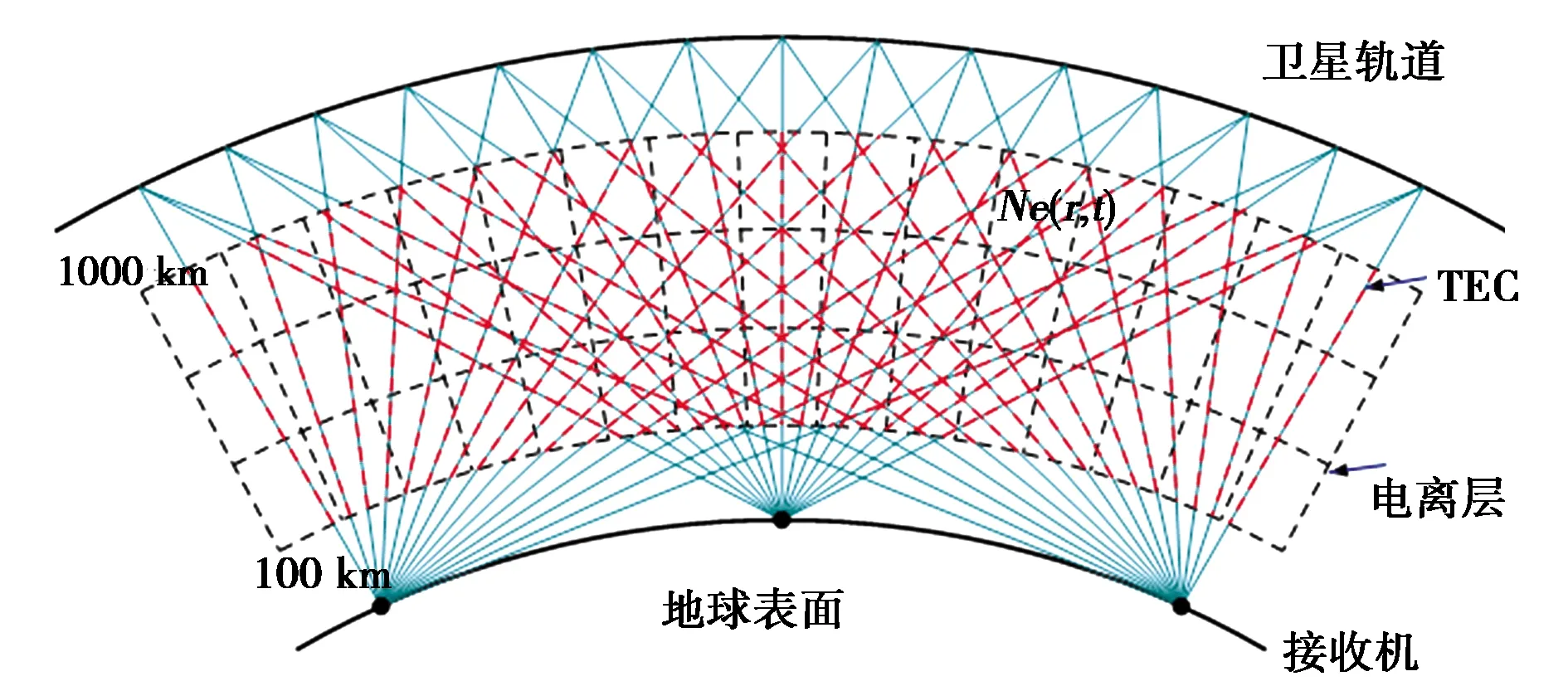
图9 电离层层析几何分布示意图
首先将待反演的观测区域进行三维格网化,如图9所示,GPS卫星信号的传播路径可以近似地看成直线.事先选取一组合适的基函数b(r)模型化待反演的电离层电子密度.

(6)
式中,J表示所选基函数的个数;xj(j=1,2,…,J)表示基函数的系数.对每条射线路径上的TEC值:
i=1,2,…,M.
(7)

(8)
将式(8)用向量的形式表示,得:
STEC=A·x+ε,
(9)
式中:STEC为STEC观测值组成的列向量;A为设计矩阵;x为基函数的系数组成的列向量,在电离层层析中,该系数即为电离层电子密度所构成的列向量;ε为观测噪声组成的列向量,通过得到的电离层电子密度层析图,可以作为进行空间环境监测的有力依据.
3 平台应用
3.1 RTK测量
BDS高精度基准服务平台重点解决了阻碍BDS CORS应用推广的管理封闭、信息闭塞等核心问题,可有效提高RTK用户测绘作业效率,大幅降低测绘作业的人力、物力成本.同时实现了多级授权的CORS系统信息化管理,可有效降低系统管理人员的工作强度,提高系统管理效率,使CORS系统管理与服务更加透明、更加合理、更加高效.
3.2 框架维持速度场
平台可利用实时空间环境监测模型及双差解算技术自动维持测绘基准框架,50 km基线精度小于3 mm,更新率小于24 h.该成果可用于CGCS2000静态框架维持,建立和维持区域动态框架,确保测绘基准框架的精度和可靠性.当遭遇自然灾害时,测绘基准服务可快速恢复.
3.3 坐标转换及精度分析
本平台通过坐标投影方程,建立参考椭球下的大地坐标和平面直角坐标间的关系,实现大地坐标和平面直角坐标的相互转换,能够根据用户提供的CGCS2000坐标成果,自动判定点所在区域,并提取相应的转换参数计算得到该点对应的独立坐标系成果和1980西安坐标系成果,同时计算出该点的正常高,以便进行似大地水准面成果的确定.
自动判定点位落入区域时采用定向射线法,该方法是判定点与多边形内外关系的通用方法,也是唯一能解决点与含有孔洞的复合多边形的位置关系的算法.定向射线法根据从待定点引出的一条射线与多边形边界交点数的奇偶性来判定该点是否包含于多边形中,算法简单,易实现,效率高.
3.4 空间环境监测
平台可以利用GPS实时观测数据,通过反演实时建立区域高精度多维电离层模型,实现对区域三维电离层、二维电离层精细形态特征的实时监控.其中,三维电离层监控精度小于2 TECU,这样可以满足工程和科研应用的需求.
4 总 结
该系统结合了目前国际上最新的GNSS数据处理理论和方法,在结合生产实践的基础上,搭建一套与实践结合紧密,技术领先的CORS综合管理及拓展服务系统平台.为青海CORS构建了一套界面美观、功能丰富、运行稳定的BDS位置综合服务平台,为全省范围内的GNSS用户提供高精度的三维、动态基准.此外,系统中的空间环境监测子模块充分发挥CORS的应用价值,扩大CORS的影响力,拓展了其他行业单位的使用.此平台极大地提高了相关行业用户的作业效率,同时为规范和监管测绘地理信息市场提供了有效的数据支持,也为其他省市的CORS平台建设提供参考[14].
猜你喜欢
科学家(2022年3期)2022-04-11
导航定位学报(2022年2期)2022-04-11
北京航空航天大学学报(2021年9期)2021-11-02
北京航空航天大学学报(2021年7期)2021-08-13
汽车工程(2021年12期)2021-03-08
语数外学习·高中版中旬(2021年11期)2021-02-14
好日子(下旬)(2020年6期)2020-08-04
智富时代(2018年8期)2018-09-28
智富时代(2018年8期)2018-09-28
劳动保护(2018年8期)2018-09-12