
基于PLC的五层并联电梯控制系统优化设计
2020-05-19 05:11魏子栋
河南科技 2020年8期
魏子栋
摘 要:传统电梯控制系统长时间运行,会使得长候梯率偏高。因此,有必要开展基于PLC的五层并联电梯控制系统优化设计研究。其间通过基于PLC的五层并联电梯控制器及总线等硬件设计、五层并联电梯控制信号输入和派梯计算等软件设计,完成对五层并联电梯的控制。仿真对比试验结果表明,与传统电梯控制系统相比,该系统可以明显缩短电梯运行时间,因此更具有实际应用价值。
关键词:PLC;五层并联;电梯;控制系统
中图分类号:TP29文献标识码:A文章编号:1003-5168(2020)08-0034-03
Optimization Design of Five-story Parallel Elevator Control System
Based on PLC
WEI Zidong
(Mechanical and Electrical Department, Guangdong Provincial Transportation Technician Institute,
Guangzhou Guangdong 510000)
Abstract: The traditional elevator control system runs for a long time, which will make the long waiting rate higher. Therefore, it is necessary to carry out PLC-based five-story parallel elevator control system optimization design research. In the meantime, through the hardware design of the PLC-based five-story parallel elevator controller and bus, and the software design of the five-story parallel elevator control signal input and elevator calculation, the control of the five-story parallel elevator is completed. The simulation comparison test results show that compared with the traditional elevator control system, the system can significantly reduce the elevator running time, so it has more practical application value.
Keywords: PLC;five-story parallel;elevator;control system
众多建筑物都配备了多台电梯并联工作,传统的单台电梯独立控制方式已经无法满足用户的需要,并联电梯控制系统应运而生[1-2]。并联电梯控制系统将建筑物当中集中排列的多台电梯设备进行统一的管理和调配,从而达到降低乘客候梯时间、乘梯时间以及减少能源消耗的目的。并联电梯控制系统具有突出的优势,受到各个国家电梯控制专家及相关学者的高度重视,电梯的调度计算也成为并联电梯控制系统的核心。为了进一步优化并联电梯系统,本文开展了基于PLC的五层并联电梯控制系统优化设计研究。
1 基于PLC的五层并联电梯控制系统硬件优化设计
1.1 基于PLC的五层并联电梯控制器设计
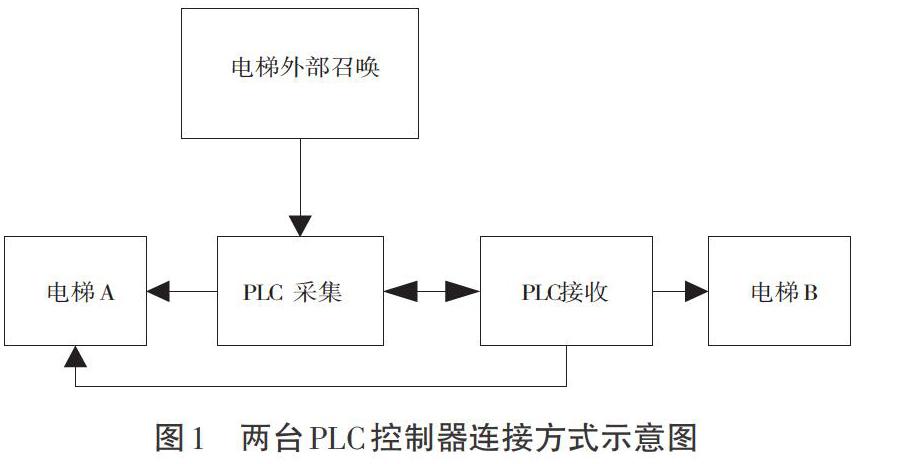
本设计选用两台基于PLC的五层并联电梯控制器,其中一台用于采集电梯之外的召唤信号,利用数据通信的形式将电梯外的召唤信号、电梯运行状态信号、电梯运行状态调配、调配信息等传递到另一台基于PLC的五层并联电梯控制器[3]。另一台PLC五层并联电梯控制器接收到相应的信息后,完成对信息的销号和定级,并自动生成运行策略及调度策略,控制五层并联电梯的运行,然后将五层并联电梯的信息发送到对方。图1为两台基于PLC的五层并联电梯控制器连接方式示意图。
本设计选用两台西门子1200型号的PLC控制器,一台PLC控制器即可对5层并联电梯进行分层控制,不需要其他外加分层器。电梯标号可由1~225号自由选择设置,工作电流小于800 mA,输入电压为DC24 V。当两部五层并联电梯同时对电梯外部召唤信号召唤时,两台电梯自动定向启动前往相应的楼层,当其中一台电梯率先到达指定楼层时,另一台电梯需要就近停靠在平层,不允许其悬浮在两个楼层之间。
1.2 总线设计
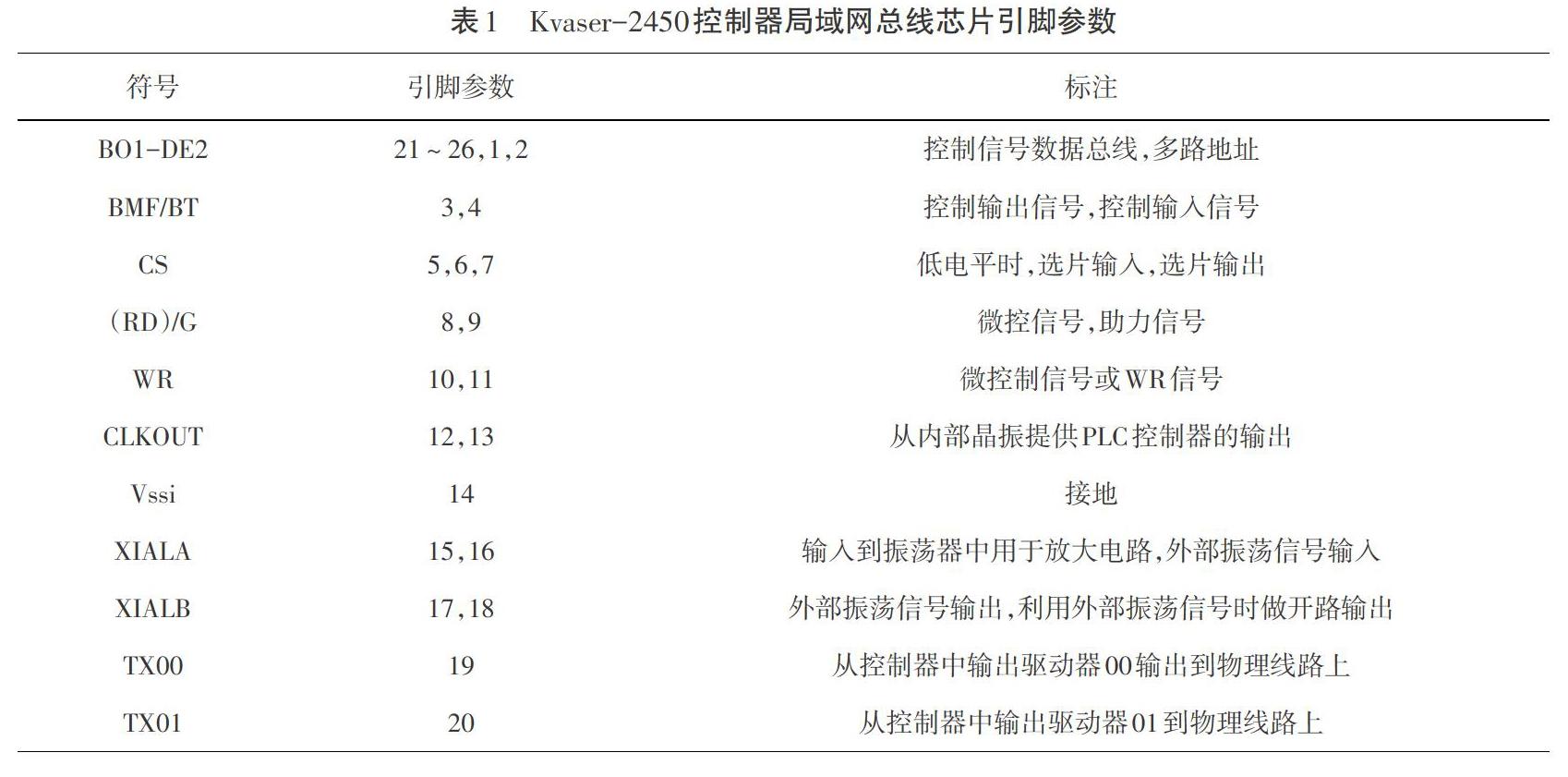
本设计选用Kvaser-2450型号控制器局域网总线作为五层并联電梯控制系统的总线,用于对电梯运行实施检测和控制,从而解决电梯控制系统中各个电子设备之间的通信问题,减少电子设备之间大量的信号线,将单独的总线连接在系统中原有的外围器件之上。Kvaser-2450控制器局域网总线具备32位数字输入和输出功能,可通过基础模块控制。这个IP20保护级别的模块具备高温、反向极性和电源电涌保护功能,总线中包含一个电源LED灯显示设备,用于显示电梯状态。采用2级24VDC输入电压(-15%/+20%)。DIN导轨安装简便,无须使用外界工具即可完成安装,成本低廉,数据传输最远距离可达15 km,数据传输速度快,最高可达2 Mbit/s。Kvaser-2450控制器局域网总线主要用于描述电梯与其他电子设备之间的信息传递方式。Kvaser-2450控制器局域网总线可以利用多种不同物理介质的双绞线、光纤等,完成对控制信号的差分电压传送。表1为Kvaser-2450控制器局域网总线中芯片引脚的各项参数。
Kvaser-2450控制器局域网总线中选用JSPO半导体型芯片,该型号芯片可支持12位和32位识别码,速率达1 Mbit/s,可读写访问错误计数器。
2 基于PLC的五层并联电梯控制系统软件优化设计
2.1 五层并联电梯控制信号输入
远程控制不具备编程能力,因此在控制信号输入到主站时,需要首先完成执行送出信号在远程控制中的显示。电梯控制信号通信采用S-Ans通信协议。
五层并联电梯信号的输出属于人为操作,系统需要将相应的操作信号在电梯内部转换为控制信号,并利用PLC控制器自动进行采集。人为错误操作常常会造成电梯产生错误控制信号,为了不影响电梯正常运行,首先需要对控制信号进行扫描,根据正确的控制顺序,将错误控制信号过滤,并将正确的控制信号采集,存储在PLC控制器中,再通过相应派梯计算得出的控制数据,控制五层并联电梯的运行。
2.2 派梯计算
确定五层并联电梯控制信号输入及相应解释后,利用式(1)计算派梯指标。
[Εmn=CEm×Wn=Cm1×Wm1+Cm2×Wm2+Cm3×Wm3] (1)
式中,[Εmn]为第[m]种运行模式下,第[n]部电梯的综合派梯指标,当[Εmn=max(Εm1,Εm2,Εm3…,Εm5)]时,第
为实现乘客召唤电梯时保持最小候梯时间,按照顺向截梯的原则,电梯的等待时间不仅要与电梯和召唤的方向相关,还要与相互之间的位置有关。根据五层并联电梯的实际运行情况,通过三种不同评价函数计算出各个电梯的等待时间,公式如下。 [ T1=|A1-A2|)×Bt+M×QtT2=(|X1-A2|+|X1+X2|+|A1-A2|)×Bt+M×Qt T3=(|X1-A2|+|X1-A1|×Bt+M×Qt]
(2)
式中,[T1]为召唤控制信号的方向与电梯当前的运行方向相同,且在电梯方向前方时的等待时间;[T2]为召唤控制信号的方向与电梯当前运行方向相同,且在电梯后方时的等待时间;[T3]为召唤控制信号的方向与电梯当前运行方向相反时的等待时间;[A1]为电梯外部召唤所在楼层数;[A2]为电梯在外部召唤到来时的当前楼层数;[Bt]为电梯以额定匀速行驶途径某一层时所需时间;[M]为电梯运行到被召唤楼层响应电梯内部指令及外部召唤所停留的层站数;[Qt]为电梯加减速、开关门以及停止时的平均时间;[X1]为电梯在本方向到达的最远停靠楼层数;[X2]为电梯在到达本方向后的最远停靠楼层数。
根据电梯处于运行状态时计算出的召唤控制信号结果的各项参数,计算出电梯到底达时所需时间,并选择时间最短时的运行数据作为召唤控制信号,保证电梯运行时间。
3 试验
在仿真软件平台中构建五层建筑物,增设两台加入本设计系统的电梯和两台加入传统控制系统的电梯,构成仿真试验环境,进行本设计系统与传统系统的仿真对比试验。
3.1 试验准备
设置电梯群共有8部电梯,标号分别为1#、2#、3#、4#、5#、6#、7#、8#,其中,标号1#、2#、3#、4#为加入本设计系统的五层互联电梯,标号5#、6#、7#、8#为加入传统控制系统的五层互联电梯。五层建筑物不包括地下部分,设置电梯在匀速运行时的速度为250 m/min,即平均通过一层楼的时间需要1 s,设置电梯的额定载荷为1 000 kg(约为16人),设置电梯的加速及减速的时间为1.5 s,开关电梯门的时间约为1.5 s,乘客平均转移时间需要2.5 s。随机选择25名乘客分布在建筑物的各个楼层,首先记录加入本设计系统的五层并联电梯运行过程中的相应数据信息,并将其设置为试验组。再以相同的方式记录加入传统控制系统的并联电梯运行过程中的相应数据信息,比较两次仿真试验结果。
3.2 试验结果及分析
根据上述试验准备,完成整个仿真试验,试验过程中的数据记录如表2所示。
由表2数据可以看出,八部电梯完成运行后,与对应的标号5#、6#、7#、8#电梯相比,标号1#、2#、3#、4#电梯所用时间明显更少。仿真试验结果表明,与传统电梯控制系统相比,本文提出的基于PLC的五层并联电梯控制系统运行效率更高,平均乘梯时间明显缩短,长候梯率明显降低,为乘客节约更多的运行时间,其更适用于实际建筑物中对電梯的控制。
4 结语
针对传统电梯控制系统中存在的问题,本文提出了一种基于PLC的五层并联电梯控制系统,并通过仿真试验证明了该方法与传统方法相比明显缩短了运行时间。未来,建筑物的发展将会更加复杂化和智能化,而对于电梯控制系统无疑会造成更大的考验。在今后的研究中,人们会将更多智能化的控制技术、更加精细化的传感设备以及更加巧妙的机械技术应用于电梯控制系统中,从而使电梯系统为人类做出更大的贡献。
参考文献:
[1]赵秀芬,王先宏,王守飞,等.基于博途软件的PLC电梯控制和仿真研究[J].产业与科技论坛,2018(24):58-60.
[2]吴哲,于江.推动产业创新联盟 突破系统技术“智”造:中国首家民营电梯技术研究机构介绍[J].中国电梯,2018(2):34-36.
[3]张青,刘立新,侯涛,等.基于ANSYS Workbench的无机房观光电梯平台结构的拓扑优化[J].中国电梯,2018(3):19-20.
猜你喜欢
知识就是力量(2017年9期)2017-10-13
科教导刊·电子版(2016年26期)2016-11-21
数字技术与应用(2016年9期)2016-11-09
小学生时代·综合版(2016年7期)2016-05-14
红蜻蜓(2015年11期)2016-02-02
早期教育(家庭教育)(2009年4期)2009-04-21
