
基于树莓派的小型水下机器人设计
2020-05-19 14:57熊超付佳伟李海翔葛增元王文森胡玉甫
科技风 2020年14期
熊超 付佳伟 李海翔 葛增元 王文森 胡玉甫

摘 要:设计了一款基于树莓派的小型水下机器人,并开发了上位机软件,在上位机发送指令能控制机器人运动、参数采集和数据传输,能极大方便用户对养殖池的水质进行监测的需求。
关键词:水下机器人;水质监测
中国是水产养殖第一大国,养殖总量占全世界70%以上[1]。在养殖过程中,经常需要控制水体的温度、PH值和含氧量等,使之适合鱼类的生长,传统方法是对水体样本进行采集然后检测,不仅不方便,而且检测不具实时性。本文针对上述问题,开展对水下机器人系统设计与集成研究,开发出了一款较为实用的水下机器人。
1 系统方案设计
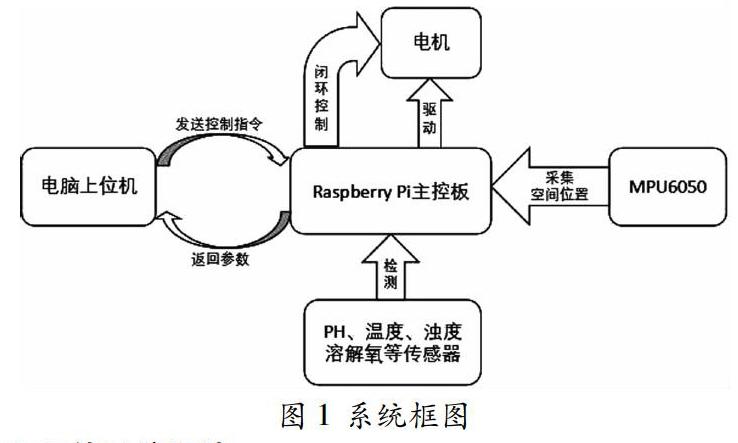
系统总体设计主要包括对硬件系统和软件系统的设计和耦合。硬件系统包括机器人结构和电路组成,软件系统包括上位机和下位机,上位机与机器人通过WiFi通信,当上位机发送指令后,机器人解析指令,然后执行相关操作。
2 硬件系统设计
2.1 本体结构设计
本体结构设计过程中应考虑安全性和实用性,要根据元器件的形状、重量等因素,进行精确计算和合理布置,使重心位于浮心下方以保证机器人有一定自平衡能力,结构设计主要包括对密封舱和推进系统进行设计[2]。
密封舱是设备的搭载仓,应保证其刚度并设计成流线型以减少阻力。密封舱还是主要的浮力材料,为保证气密性和安全性,在接线孔处使用胶水灌封,在接口处采用密封圈密封,以实现防水效果[3]。
推进系统设计的关键是确定推进器的数量及排布方式,这会使机器人具有不同的自由度及机动性能[4]。本设计使用4个推进器,在水平面双推进器平行布置,垂直面双推进器对称分布,使其具有良好的稳定性,外型结构如下图所示。
2.2 硬件电路
硬件电路设计应保证稳定性和抗干扰性,对元件的选择主要包括:主控板、电源、推进器、信号接收装置和各类传感器。
主控板:选用Raspberry Pi 3B+,它能通过SSH、远程桌面或者显示器连接显示界面,能直接在界面进行编程,对GPIO口进行操作,还可调用强大的Wring Pi库函数,其输出稳定、调试方便、扩展性强,满足本设计需求。
电源:选用20000mAh电源,续航时间长且充电方便,通过升压模块能满足主控板、推进器和各类传感器不同的供电需求。
推进器:选用无刷直流电机,其转矩大,启动电流小,制动特性好,电机使用无刷电调驱动,因为电调可以精确控制电机转速和改变其旋转方向。在电调信号线与树莓派GPIO口接线时应加入光耦隔离器,防止电源不稳定损坏树莓派,也能抑制电调电流对树莓派产生信号干扰。
信号接收装置:树莓派自带WiFi模块,但电磁波在水中会被削弱,机器人只能在很小范围接收到信号,搭载2.4G信号浮标,能使机器人及时接收到指令。
传感器:搭载PH、温度、浊度等传感器,使机器人具备水质检测的能力;搭载深度传感器,便于对不同深度水质进行记录;搭載MPU6050传感器,对自身姿态信息采集,通过PID算法调整姿态,防止偏移和侧翻。
3 软件系统设计
3.1 上位机
上位机主要实现指令发送、数据接收、数据存储和预警功能。设定上位机为服务器端,使用Labview为开发工具,通过主机名或者IP地址与端口号建立侦听,等待客户端连接。
界面中设置自主模式和遥控模式,在自主模式下,机器人根据预设轨迹运行并采集数据,在遥控模式下,机器人通过接收指令来完成一系列操作;当数据传回上位机时,将显示在页面并存入数据库,经系统计算分析,参数若超出相关标准则预警。
3.2 下位机
下位机主要实现数据采集、数据存储和数据传输功能。下位机为客户端,首先建立socket套接字,然后用bind函数绑定服务端IP地址,调用connect函数向服务器端发送连接请求,当服务器端接收并连接成功后,就可双向通信进行数据交换。
机器人接到上位机指令后进行数据解析,然后改变输出PWM,从而改变速度和方向,当不确定因素导致机器人不稳定时,机器人可以根据当前姿态应用PID算法进行自动偏航矫正;机器人收到下潜指令后,每下潜均匀深度时检测水质水质检测,然后按程序中设定的规则将所处的深度和各项水质参数发送给上位机,下潜一定深度或一段时间后自动上浮;机器人还能对电量进行监测,电量不足15%则自动上浮。
4 结语
本文介绍了一种基于树莓派的小型水下机器人设计与实现方法,从总体设计、硬件结构设计和软件系统设计方面进行了阐述,分析了设计关键和设计过程中应注意的相关问题,机器人性能良好,满足水质检测要求,设计方法可供参考。
参考文献:
[1]刘世禄.关于推进我国水产养殖业稳步、可持续发展的战略思考[A].中国水产学会、四川省水产学会.2016年中国水产学会学术年会论文摘要集.
[2]金碧霞,方勇.用于水下安保的ROV总体结构设计[J].机械研究与应用,2014,27(02):141-144+147.
[3]黎柱坤,王慧,林冰胜,张宇航,吴华宇,黄光炜,陈春雷,王骥.用于水产养殖的水下机器人设计与制作[J].电子世界,2017(15):36-39.
[4]高芬.一种小型消费级水下机器人的设计与实现方法[J].机电信息,2019(20):115-116.
猜你喜欢
课堂内外(小学版)(2020年5期)2020-07-20
广东造船(2020年1期)2020-05-03
智族GQ(2019年9期)2019-10-28
科技创新导报(2016年31期)2017-03-30
农产品市场周刊(2016年43期)2016-12-23
农产品市场周刊(2016年43期)2016-12-23
汽车观察(2015年10期)2016-04-06
电脑爱好者(2016年6期)2016-04-01
中学生博览(2015年18期)2015-11-06
航空知识(2015年7期)2015-08-08
