
多方位角观测星载SAR技术研究
2020-05-18 05:27:12王鹏波曾虹程门志荣李春升
雷达学报 2020年2期
陈 杰 杨 威 王鹏波 曾虹程 门志荣 李春升
(北京航空航天大学电子信息工程学院 北京 100191)
1 引言
合成孔径雷达(Synthetic Aperture Radar,SAR)卫星系统技术近些年发展迅速,卫星平台控制与测量能力、有效载荷信号获取能力、天线波束扫描能力、地面系统数据处理能力都显著提升。如何充分利用和发挥上述能力,发展新体制和新模式,提升任务快速响应水平和雷达图像质量,全面获取目标的散射信息、几何信息和运动信息,是未来研究和发展的重要方向。
传统星载SAR工作模式主要包括条带模式、扫描模式、聚束模式[1]。随着星载SAR技术发展,为提升对地观测面积和空间分辨能力,更为先进的工作体制和成像模式相继提出并实现,比如方位多通道接收体制[2]、滑动聚束模式[3]。在此基础上,德宇航研究人员利用TerraSAR-X卫星开展了大量在轨试验,创新实现了更多种新模式,包括TOPS模式[4]、逆TOPS模式[5]、Bi-Di模式[6-8]、Staring模式[9,10]、以及Wrap-Staring[11]模式等,实现了空间分辨率、观测覆盖面积以及辐射分辨率的显著提升。随着不同领域的应用需求增加,拓展图像产品样式、提升产品服务水平成为未来星载SAR技术发展的重要目标,迫切需要创新体制,牵引出新的成像模式。
20世纪90年代,Sandia实验室在美国国防高等研究计划署的支持下,基于X波段机载SAR系统开展了MSTAR计划试验[12],得到了大量目标不同观测角度下的SAR图像,验证了雷达目标散射特性随观测角度显著变化这一结论。随后,美国空军研究实验室研制了机载圆迹SAR系统,通过机载平台围绕观测区域作圆周飞行获取目标全方位三维散射信息,得到了GOTCHA数据集,并利用该数据集实现目标三维成像[13,14]。上述研究成果表明,多方位角观测可获取更多的目标信息。因此,如何在卫星平台上实现多方位角观测成为星载SAR技术研究热点之一。
星载SAR多方位角观测利用卫星平台机动或者天线波束扫描能力,可从不同方位角度对目标区域进行灵活的成像观测,具备在一轨过境期间内对不同区域观测或者同一区域多次观测的能力,可实现高分辨率宽覆盖和灵活的对地观测,信息获取效率的显著提升。多方位角观测星载SAR技术的研究处于初始阶段,但在图像质量提升、动目标检测、三维几何信息提取等方面已经取得了一定的研究成果[15-20],受到国内外研究学者的重视[21],说明了多方位角观测星载SAR技术具有显著的应用前景。
本文针对多方位角观测星载SAR技术发展现状和趋势进行研究。第2节对国内外先进SAR卫星性能和特点进行了总结,对工作能力进行了分析。第3节重点对基于多方位角观测的成像新模式进行了综述。在此基础上,第4节阐述了多方位角观测星载SAR数据处理方法,并展示了处理结果。第5节对多方位角观测星载SAR技术发展进行总结,并对未来发展进行了展望。
2 典型SAR卫星简介
本章总结了国内外具有多方位角观测能力的典型SAR卫星,对其观测能力进行了综述,并重点解析其最具特色的工作模式。具体包括:以色列TecSAR卫星,德国TerraSAR-NG卫星、SAR-Lupe卫星,美国Lacrosse卫星、FIA卫星、Capella卫星和SR卫星。
2.1 TecSAR卫星
TecSAR卫星是以色列研制的雷达成像侦察卫星(SAR Technology demonstration satellite,TecSAR),也称为“北极星”卫星,工作在大倾斜角轨道,主要用于保证以色列对中东地区态势信息掌控的能力。TecSAR卫星有效载荷是高分辨率X波段合成孔径雷达XSAR,其前身是机载型X波段多模式雷达,经过多次机载试验验证后,改良搭载在卫星平台上。
TecSAR卫星最大的特点是灵巧、质量轻、性能好、工作模式灵活,TecSAR重量约300 kg,有效载荷只有100 kg,最优分辨率可达0.7 m,具有全极化的工作模式。TecSAR卫星具有多种的工作模式,包括扫描模式、条带模式和聚束模式等[22-24]。
此外,TecSAR卫星采用的是抛物面天线,通过电扫和机械扫描可实现天线波束的二维灵活扫描,具备一种先进的工作模式,即镶嵌模式(mosaic),如图1所示。因此,TecSAR卫星可多方位角对地观测,但目前从公开报道的资料看,TecSAR卫星主要利用二维波束扫描能力,通过拼接提升覆盖性能[25]。
2.2 TerraSAR-NG卫星
在TerraSAR-X/TanDem-X姊妹星成功发射和应用的基础上,欧空局和德宇航正在研制下一代高分辨率SAR卫星TerraSAR-NG,该卫星与TerraSAR-X卫星具有相同的轨道,并将和TerraSAR-X/Tan-Dem-X、以及西班牙的PAZ卫星一起构建星座,称作WorldSAR星座,其结构图如图2所示。
图1 镶嵌模式工作示意图Fig.1 Illustration of mosaic mode

图2 WorldSAR星座工作示意图Fig.2 Illustration of WorldSAR constellation
和第1代TerraSAR-X相比,TerraSAR-NG卫星对地观测能力更强,并引入了多通道滑动聚束模式和多通道TOPS模式,其中多通道滑动聚束模式可实现0.25 m分辨率、5 km 5 km的幅宽成像;多通道TOPS模式可实现30 m分辨率、400 km的幅宽成像[26-31]。
TerraSAR-NG卫星具有更强的波束扫描能力,据其成像幅宽和轨道高度可以推算其方位向波束扫描能力较第一代TerraSAR-X卫星相比提高了1倍左右[32,33],因此,TerraSAR-NG卫星具有一定多方位角成像观测能力。
2.3 SAR-lupe卫星
SAR-lupe卫星是德国军用雷达侦察卫星[34,35],从2006年12月至2008年7月,先后发射了5颗同样的雷达卫星,分布在3个不同的轨道上,构成星座(如图3所示),最长10小时内可对可视区域内任何目标进行成像侦察,极大地提升了欧洲天基对地成像侦察能力。
SAR-lupe卫星重约770 kg,采用X波段的有效载荷,多采用条带和聚束两种成像模式,可获取多种分辨尺度的SAR遥感图像。其中,需要特别关注的是SAR-lupe卫星具有较强的平台机动和控制能力,不同于TerraSAR-X卫星,SAR-lupe卫星可以通过平台机动来调整波束指向,实现高分辨率聚束等模式,获取0.5 m分辨率、5.5 km×5.5 km大小观测区域的图像。因此,通过平台的机动能力,SAR-lupe卫星也具备对地多方位角观测能力。
2.4 Lacrosse卫星和FIA卫星
长曲棍球卫星(Lacrosse)[36]和未来成像架构(Future Imagery Architecture,FIA)[37]卫星是美国在轨的军用成像侦察卫星。其中Lacrosse卫星从1988年12月发射第1颗卫星至今已经先后发射了5颗长曲棍球卫星,Lacrosse-1,Lacrosse-2,Lacrosse-3已经退役,Lacrosse-4和Lacrosse-5仍在轨工作。Lacrosse系列卫星重约12~16 t,轨道倾角为57°或68°,工作在L波段和X波段,具有水平和垂直两种极化方式,并首次实现了0.3 m的成像分辨率,代表了星载SAR卫星的领先水平。随着Lacrosse系列部分卫星退役,美国从2010年先后发射了4颗FIA卫星,并将FIA卫星的轨道高度调高,进一步提升了对地观测的覆盖能力。
Lacrosse系列卫星和FIA系列卫星具有很强的机动能力,在较短时间内能快速机动从而实现波束二维灵活扫描。因此,可以推测,Lacrosse和FIA卫星具备较强的多方位角观测能力,工作模式非常灵活。
2.5 Capella卫星
Capella卫星是美国商用系列卫星,共准备发射36颗,建成后36颗卫星将位于12条不同的轨道,SAR成像重访时间不大于1 h,INSAR成像重访时间不大于10 h,如图4所示。
Capella卫星轨道高度介于485~525 km,工作于X波段单极化模式,采用极地太阳同步轨道,倾角约为90°,轨道周期90 min,具备多种成像模式,包括聚束模式、滑动聚束模式、条带模式等。其中,值得注意的是,为了提升聚束模式图像的辐射分辨率和条带模式的覆盖性能,Capella卫星利用灵活的波束扫描能力,分别实现了多方位角观测聚束模式和多方位角观测条带模式[38]。此外,Capella卫星还具有任务实时响应能力,综上分析,Capella卫星具有较强的多方位角观测能力。
2.6 Space Radar卫星
太空雷达(Space Radar,SR)[39,40]卫星是美国军方有意向开展的一个项目,具备0.1 m超高分辨率成像、地面动目标指示(Ground Moving Target Indication,GMTI)、数字地形测绘(Digital Terrain Elevation Data,DTED)、海洋监视、反导以及战场实时调度和接收的能力。不同于经典SAR卫星多用于战略侦察,SR卫星还具备很强的战役战术信息支持能力,可直接提供作战信息保障。SR卫星处理除了具备超高分辨率成像的能力,其相控阵天线还具有超强的波束扫描能力,可实现方位向正负45°扫描,具备很强的多方位角观测能力。
图3 SAR-lupe卫星星座Fig.3 Illustration of SAR-lupe constellation

图4 Capella卫星星座构成示意图Fig.4 Illustration of Capella constellation
SR卫星计划因为成本的原因已经停止,但其提出的工作方式和支持战术应用的想法对SAR卫星技术的发展具有重要的借鉴意义。
3 多方位角观测成像模式
未来星载SAR系统对分辨率、覆盖性能、灵活应用等均提出了更高的要求[41]。传统星载SAR系统工作于正侧视,雷达系统的信息获取能力受限;斜视多方位角观测可大幅增加雷达系统对地面目标的观测时间,显著提升星载SAR对地探测性能。
前面分析可知,国外部分SAR卫星具备多方位角度观测能力,但根据其方位观测角范围不同,所采用的工作体制也不同。随着方位观测斜视角度变大,回波信号的距离徙动量大幅增加,以TerraSAR-X卫星参数为例开展距离徙动分析,每条线段表示一个目标点的斜距历程,相邻目标点间隔2.5 km,如图5所示。可以看到,正侧视状态下实现0.25 m分辨率,5 km方位幅宽所引起的斜距徙动为2.9 km,现有固定脉冲重复周期体制可以有效地接收回波;但在斜视状态下,如在-23.5°~-17.3°斜视角范围内完成同样分辨率和幅宽的观测所引起的距离徙动将达到35.0 km。此时,若采用传统固定脉冲重复周期工作体制,距离徙动量的增加将增大距离延迟时间在回波窗中占比(如图6所示),进而导致雷达系统的有效测绘带宽度大幅降低,甚至造成回波信号溢出接收窗,无法有效接收回波信号。因此,为实现在不同斜视角条件下对目标区域的多方位角观测,首先需要采用新的工作体制。

图5 斜距随扫描角度变化曲线Fig.5 Slant range varying with squint angle
为了解决斜视多方位角观测所面临的回波信号有效接收问题,一种新的工作体制被提出[42-46]。区别于传统SAR系统采用的恒定脉冲重复周期,该工作体制通过调整雷达系统的采样周期,修正雷达系统的回波窗开启时刻,有效缓解超大距离徙动对回波信号接收所带来的影响。图7对比给出了固定脉冲采样间隔数据接收和基于方位非均匀采样的数据接收示意图。其中∆t1表示回波信号在回波窗的位置。如图7(a)所示,传统雷达系统采用恒定脉冲采样间隔数据获取方式,距离徙动量的变化将导致回波信号在回波窗中的位置发生变化,此时,超大的距离徙动量将导致回波信号溢出接收窗,进而无法接收(如图7(a)中第n个脉冲的回波溢出接收窗)。基于方位非均匀采样的数据获取方式,以斜距变化规律为基础,通过调整雷达系统的脉冲发射位置来改变回波窗的开启时间,补偿超大距离徙动所造成回波信号延迟时间的变化,实现超大距离徙动条件下回波信号的有效接收。
图8给出了5 km×5 km场景的四个顶点在斜视状态下的回波信号仿真结果,其中图8(a)为固定脉冲采样间隔数据接收模式回波信号,图8(b)为基于方位非均匀采样的数据接收模式回波信号。如图所示,当雷达系统工作于固定脉冲采样间隔时,超大的距离徙动导致雷达系统无法有效接收目标场景的回波信号;而基于方位非均匀采样的工作新体制可有效补偿超大距离徙动所带来的影响,实现斜视多方位角观测模式下回波信号的有效接收。

图6 回波窗数据接收示意图Fig.6 Illustration of the receive window

图7 固定脉冲间隔与方位非均匀采样体制下脉冲发射与回波接收示意图Fig.7 Illustration of receiving signal for uniform and non-uniform sampling strategy

图8 点阵目标场景回波信号仿真结果Fig.8 Echo data of point targets using uniform and non-uniform sampling

图9 星载SAR多方位角观测Fig.9 Illustrations of azimuthal multi-angles observation
综上所述,在较小方位角观测范围内,采用传统恒定脉冲重复周期的体制即可实现;但当方位观测角范围变大,需要在超大方位斜视角条件下进行观测时,需采用方位非均匀采样的工作新体制。
多方位角观测增加了卫星一轨过境对地观测时间窗口,星载SAR系统对地探测能力显著提升,基于方位非均匀采样新体制,实现当前SAR卫星所不具备的成像模式及能力。例如:将超大观测时间窗口分配于相邻观测区域,可实现高分辨率宽覆盖对地观测(如图9(a)所示);将超大观测时间窗口用于观测同一观测区域,可实现重点目标多方位角精细解译或动目标航迹获取(如图9(b)、图9(c)所示);将超大观测时间窗口分配于不同位置的重点目标,可实现广域区域重点目标灵活观测(如图9(d)所示)。
综上,采用基于方位非均匀采样新体制的多方位角观测方式,不仅可进一步提升高分辨率宽覆盖对地观测能力,同时还具备重点目标多方位精细解译、运动目标航迹生成、广域多目标灵活观测等观测能力,实现了高分辨率宽覆盖与灵活应用的高度统一。
4 多方位角观测星载SAR数据处理
本节主要介绍多方位角观测星载SAR处理方法和处理结果。
4.1 多方位角观测星载SAR成像处理算法
不同的应用需求对分辨率和时效性的要求也不同,因此没有通用的多方位角观测星载SAR成像处理算法。但随着方位斜视角度变大,方位/距离深度耦合加深,方位非均匀采样现象明显,精确解耦合难度大。如何选择合适的解耦合方法,在斜视条件下实现多方位角观测星载SAR精确成像处理是重点。
常用算法主要包括后向投影算法(Back Projection Algorithm,BPA)[47]、频谱分析算法(SPECtral ANalysis,SPECAN)[48]、距离多普勒算法(Range Doppler Algorithm,RDA)[49]、调频变标算法(Chirp Scaling Algorithm,CSA)[50,51]、频率尺度变换算法(Frequency Scaling Algorithm,FSA)[52,53]、距离徙动算法(Range Migration Algorithm,RMA)[54]、Chirp Z变换算法(Chirp-Z Transform,CZT)[55]和极坐标格式算法(Polar Format Algorithm,PFA)[56]等,文献[57]对这些算法的适用模式、解决问题以及典型应用进行了系统的总结,本文不再赘述。
此外,成像处理算法的选择建议遵循如下原则:
(1)不同角度观测下的数据都尽可能选择同样的参考坐标性,可减小后续图像配准的复杂度;
(2)对于后续处理需要用到相位信息的,需要采用高保相算法;
(3)在满足分辨率要求的情况下,尽量采用快速频域算法。
4.2 观测星载SAR动目标检测
地面运动目标检测(GMTI)是星载SAR发展的重要方向之一,目前常采用较为成熟的方法包括DPCA,ATI,SATP等[58-60]。其中,DPCA和ATI处理流程较为简单,但精度较差;STAP方法精度相对较高,但对系统接收通道数目要求较高,且处理流程复杂,难以实际应用与星载SAR数据处理。此外,上述方法还存在速度模糊、方位速度无法估计等问题,难以满足更高的应用需求。
受德国TerraSAR-X卫星Bi-Di模式启发[61],利用多方位角观测星载SAR序贯图像可以精确的估计目标方位向和距离向速度,估计精度可达到0.1 m/s,且避免速度模糊等问题。多方位角观测星载SAR图像运动目标检测与跟踪模式如图10所示,卫星通过调整方位向观测角度,在不同时间完成同一区域的观测,获取包含动目标的序贯图像。获取的序贯图像之间存在时间差,因此运动目标在不同图像中存在差异,利用上述差异可完成目标方位向和距离向速度估计[18]。
理论证明,方位向速度估计不受距离向速度影响,因此首先对方位向速度进行估计,再对目标距离向速度进行估计,流程如图11所示,具体方位向和距离向速度估计如图12和图13所示。
为了验证该方法的有效性,利用TerraSAR-X卫星凝视模式图像产品进行验证,如图14所示。凝视模式下,方位向扫描角度范围为±2.2°,对图像产品做方位傅里叶变换,在距离多普勒域内沿方位向将有效带宽内的频谱平均划分成5份,分别对划分后的频谱做方位向逆傅里叶变换,生成5幅序贯图像。多普勒频率和方位观测角度有一一对应的关系,不同的方位频谱范围对应不同的方位观测角度,利用凝视模式图像产品可等效获取序贯图像。
从序贯图像处理中可以看出,高铁由于运动在序贯图像中位置发生了偏移,通过测量像素的偏移和序贯图像之间的时间基线,可完成目标速度估计。本例中,测得的高铁方位向速度为2.12 m/s,距离向速度为-17.22 m/s[16]。

图10 多方位角观测动目标检测、跟踪模式Fig.10 Movingt target detection mode based on azimuthal multi-angles observation

图11 速度矢量提取流程图Fig.11 The flowchart of velocity vector estimation

图12 方位向速度估计流程图Fig.12 The flowchart of azimuth velocity estimation

图13 距离向速度估计流程图Fig.13 The flowchart of range velocity estimation

图14 多角度动目标序贯图像(高铁)Fig.14 Azimuthal multi-angles SAR images (high-speed railway)
利用速度估计结果,可进一步完成目标的重聚焦和重定位,可以精确绘制目标的运动航迹,实现动目标的持续监视。
4.3 多方位角观测星载SAR图像辐射质量提升
斑点噪声直接影响SAR图像的辐射分辨率,不利于SAR图像的判读和定量化应用。经典的SAR图像斑点噪声抑制方法主要包括多视处理、空域滤波、变换域滤波等。这类方法虽然抑制了斑点噪声,提升了辐射分辨率,但牺牲了方位向分辨率或者目标的细节信息,因此上述方法需要在抑制噪声和保持细节中进行权衡。如何在在抑制斑点的同时保持空间分辨率和目标细节的完整是未来研究的重要方向之一。
多方位角观测SAR卫星利用平台机动或波束扫描能力可从不同方位观测角度获取地面同一区域的场景图像。因此可研究面向多方位角序贯图像的斑点噪声抑制新方法。其中,有代表性的是基于扩展非局部均值滤波的斑点噪声抑制方法。该方法首先利用非局部均值算法对第1幅图进行处理,并将其作为参考图像。在此基础上,将另一个角度观测到的同一区域的图像做为目标图像,联合起来进行滤波处理。进行联合滤波处理时,在目标图像和参考图像的对应搜索区域中同时进行相似性度量和权值计算,使更多有效的低噪声像素参与到重建中,从而得到抑噪效果更好的结果。将该处理结果作为下一次的参考图像,并和下幅图像进行联合处理。依此类推,直到所有序贯图像处理完毕,具体的流程图如图15所示。

图15 多方位角观测SAR图像斑点噪声抑制流程图Fig.15 The flowchart for speckle noise suppression based on azimuthal multi-angles SAR images
为了验证方位的有效性,选择多方位角SAR图像进行处理验证,如图16所示(试验采用TerraSAR-X图像,四副图像方位观测角度分别是-1.7°,-0.5°,+0.5°和+1.7°)。对比处理结果可知,如表1所示,采用的图像越多,滤波效果明显、细节保留信息越好。
4.4 多方位角观测星载SAR图像旁瓣抑制
多方位角观测星载SAR系统采用斜视工作模式,可获取多幅大斜视角下的星载SAR图像。然而,随着方位斜视角度的增加,点目标的频谱扭曲随之加剧,使得距离向和方位向的旁瓣倾斜,不再是沿距离向和方位向分布。因此,传统旁瓣抑制方法无法直接进行多方位角观测星载SAR旁瓣抑制。
为解决倾斜旁瓣抑制的问题,可将斜视SAR图像“校正”,利用优化旁瓣抑制算法进行旁瓣抑制,再将SAR图像恢复到原来的旁瓣延伸方向,从而得到旁瓣抑制后的单样本SAR图像。具体方法为:首先利用位移原理,对斜视条件下的频谱进行方位向校正,再对方位向校正后的数据进行距离向频谱校正。然后,使用改进空间变迹(Spatially Variant Apodization,SVA)算法进行旁瓣抑制。最后,再次利用位移原理,将旁瓣抑制后的数据恢复至原始的旁瓣延伸方向,即得到最终的处理结果[15],具体流程如图17所示。
为验证斜视条件下旁瓣抑制处理方法的有效性和效果,采用机载图像进行验证,如图18所示。本例中采用了10幅图,方位角范围从-10°~10°,图18(a)给出了原始图中的一幅,图18(b)给出了旁瓣抑制后的结果,可以看出,利用多方位角观测图像产品可有效抑制旁瓣的影响。

图16 滤波处理结果Fig.16 Filtering results

表1 辐射分辨率分析结果Tab.1 Radiation resolution analysis results
4.5 多方位角观测星载SAR图像信噪比提升
SAR图像信噪比是影响图像质量的重要因素,信噪比较差时会影响目标识别效果,甚至导致目标“淹没”于噪声之中。传统信噪比增强方法多采用提升SAR载荷发射功率或滤波等方法,但当场景较为复杂时,上述方法的效果有限。多方位角观测星载SAR可从不同角度获取同一区域的图像,利用图像之间目标信息的冗余性和噪声之间的独立性,通过联合处理方法可提升图像的信噪比。
为实现多方位角观测星载SAR图像信噪比提升,可基于SAR图像的统计信息建立图像的正则化变分模型,利用梯度下降算法来对模型进行寻优求解,以此来提升SAR图像信噪比。该方法首先对多幅多方位角图像进行配准处理,其次,根据图像统计特性及图像中典型目标特征选取正则化约束项,根据选取的正则化约束项建立正则化变分模型,接下来通过梯度下降算法对模型进行寻优求解,通过多次迭代计算,得到处理后的图像。具体的处理流程图如图19所示。
为了验证信噪比提升方法的有效性,利用5幅不同方位角观测图像进行验证,如图20(a)—图20(e),方位向观测角度分别为-6.5°,-3.3°,0°,3.3°和6.5°。经过信噪比提升后的处理结果如图20(f)所示。对比处理前后图像可知,噪声得到显著抑制,目标细节信息更为清晰,视觉效果和图像质量得到大幅提升,为后续目标解译和判读奠定了基础。需要说明的是,采用正则化的处理方法,不仅信噪比得到了提升,辐射分辨率也同时得到了提升。
4.6 多方位角观测星载SAR图像超分辨
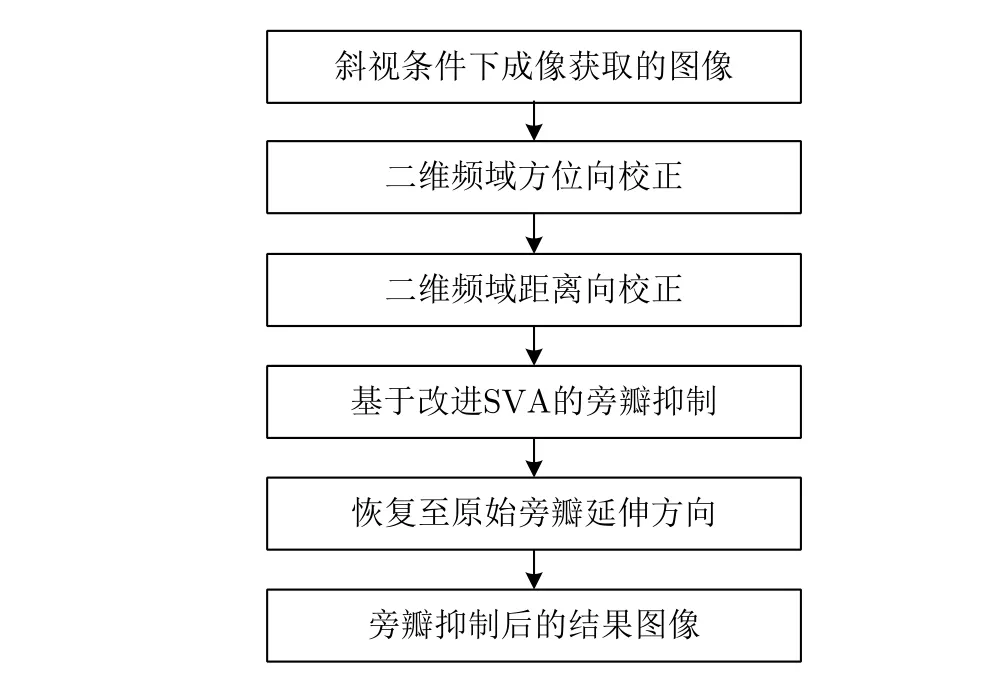
图17 斜视条件下旁瓣抑制处理流程Fig.17 The flowchart for sidelobe suppression in squint
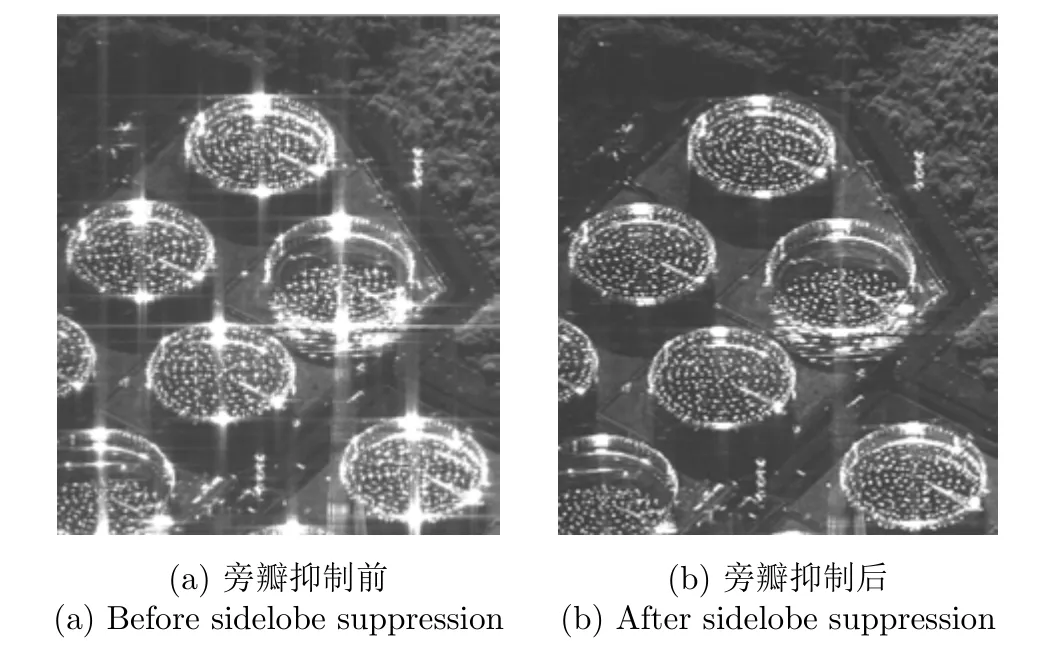
图18 斜视条件下旁瓣抑制处理试验结果Fig.18 Sidelobe suppression results
高分辨率是星载SAR系统永恒的追求,然而随着分辨率的逐渐增加,星载SAR系统复杂度显著增加,成像难度急剧增加。多方位角观测星载SAR可获取同一区域的多幅SAR图像,在图像数量增加的情况下,通过挖掘不同图像成像模型之间的相关参数,并对这些相关参数进行联合建模,控制待估计参数的个数,可达到超分辨的目的,从而为成像分辨率提升提供了技术新思路[62]。

图19 多方位角观测星载SAR信噪比提升流程图Fig.19 The flowchart of SNR improvement based on azimuthal multi-angles observation
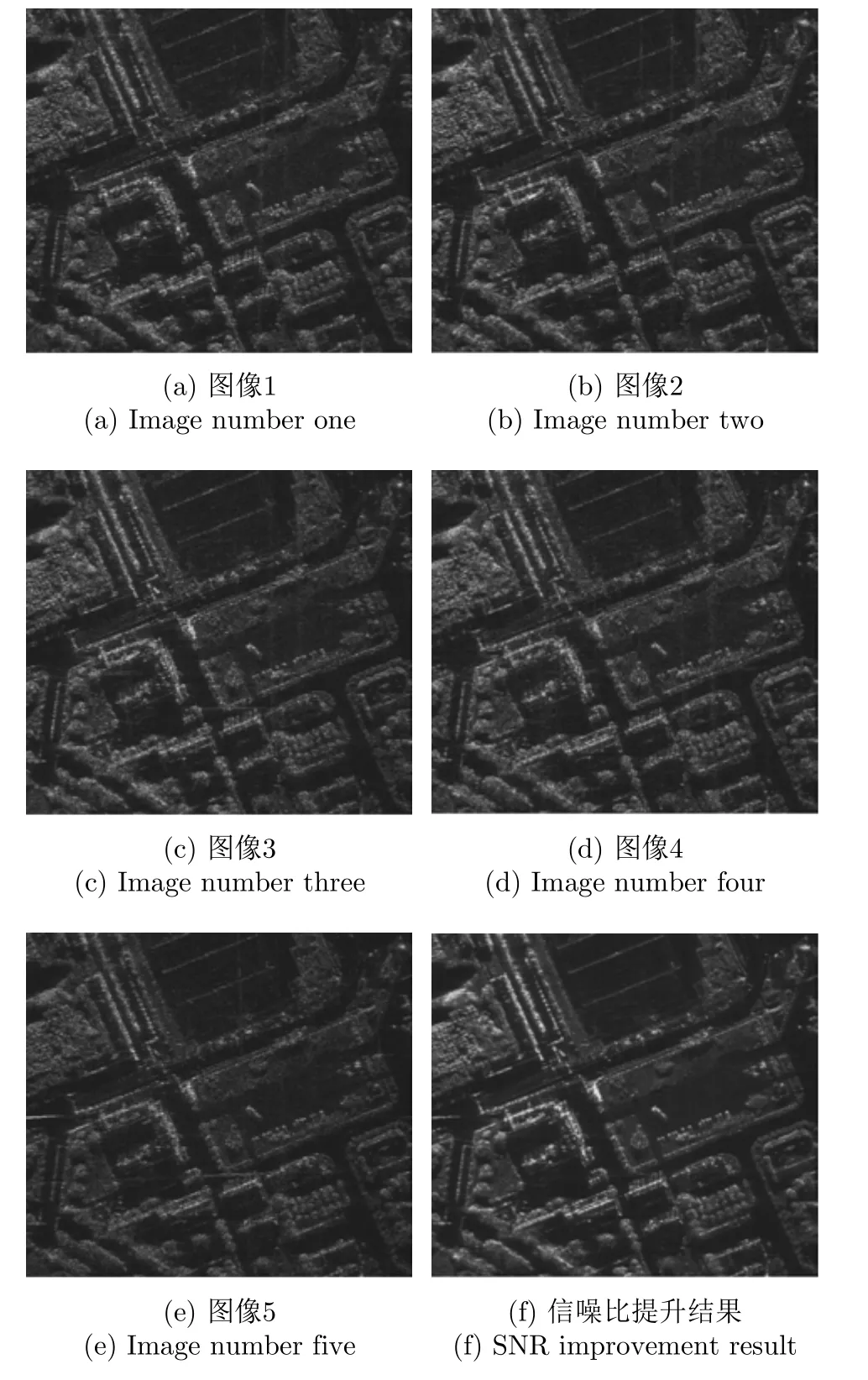
图20 多方位角观测SAR图像目标信噪比提升Fig.20 SNR improvement result based on azimuthal multi-angles observation
基于多方位角观测星载SAR获取的多幅SAR图像,构建总变分模型向量,并在向量总变分范数基础上通过求解模型Euler-Lagrange方程,实现图像的超分辨。利用多方位角观测机载图像对方法有效性进行验证,如图21所示。图21(a)—图21(e)为5幅原始多方位角观测图像,方位观测角度分别为-7°,-3°,0°,3°和7°。经过超分辨率处理后,可发现点状目标明显更为清晰(如图21(f)所示),相对与单角度观测图像,方位向和距离向分辨率均得到显著提升,其中方位向分辨率提升了2.16倍,距离分辨率提升了1.03倍。

图21 多方位角观测SAR超分辨率处理结果Fig.21 Super-resolution processing result based on azimuthal multi-angles observation
4.7 多方位角观测星载SAR成像立体定位
SAR图像立体定位技术是实现SAR图像目标定位的重要方法之一,并具备提取目标高程的能力。但对于传统星载SAR系统,需要多次航过才能获取符合立体定位的图像产品,难以快速实现目标区域的立体定位。多方位角观测星载SAR系统在单航过中可对目标区域进行多方位角观测,获取满足立体定位要求的序贯SAR图像对,从而实现快速立体定位。

图22 几何观测模型Fig.22 Geometric observation model
目前,最常用的SAR图像立体像对获取方式为同侧立体观测和异侧立体观测,其几何观测模型分别如图22(a)和图22(b)所示。同侧立体观测表示两幅图像获取时SAR平台在成像区域的同一侧,该方式获取的两幅SAR图像散射特性相似,图像几何形变差别不大,图像配准容易,但视差和基高比小,因此定位精度低。异侧立体观测时SAR平台在观测区域的异侧,导致两幅SAR图像散射特性相差较大,图像几何形变差别大,定位精度比同侧立体观测精度高,但图像配准难度大。图22(c)给出了多方位角立体观测模型,在卫星一次飞行过程中多方位角观测星载SAR可对成像区域进行不同方位角度的斜视观测,获取多方位角观测SAR图像立体像对,从而实现立体定位。
同侧立体观测和异侧立体观测主要工作在正侧视条件下,方位观测角度相同,需要两轨SAR图像实现立体定位。但受卫星轨道的限制,获取两轨SAR图像需要间隔一定的时间,无法实现快速立体定位。多方位角立体观测在卫星一轨飞行过程中,对目标区域从不同方位角度进行观测并构建立体像对,可实现快速立体定位。
传统单幅SAR图像R-D定位算法采用的是地球模型方程、斜距方程和多普勒方程进行目标定位。但当目标高程未知时,地球模型方程不再成立,因此无法实现目标的立体定位。多方位角观测立体图像对(以M副图像为例)在完成图像配准后(配准流程如图23),可提供M个斜距方程和M个多普勒方程,因此问题转换成求解超定方程,可采用牛顿迭代法等数值方法进行求解。
为了验证单轨多方位角SAR图像立体定位方法的有效性,采用点目标进行仿真验证,如图24(a)所示,P1~P5的高度分别为30 m,30 m,0 m,-30 m,-30 m。采用传统单角度定位方法和多方位角定位方法结果如图24(b)所示。从结果可看出,采用多方位角立体定位,结果(蓝色点)和设置点(红色点)完全重合,而采用单角度定位方法的结果(绿色点)则存在较大定位误差。

图23 多方位角SAR图像配准流程图Fig.23 The flowchart of image registration based on azimuthal multi-angles observation
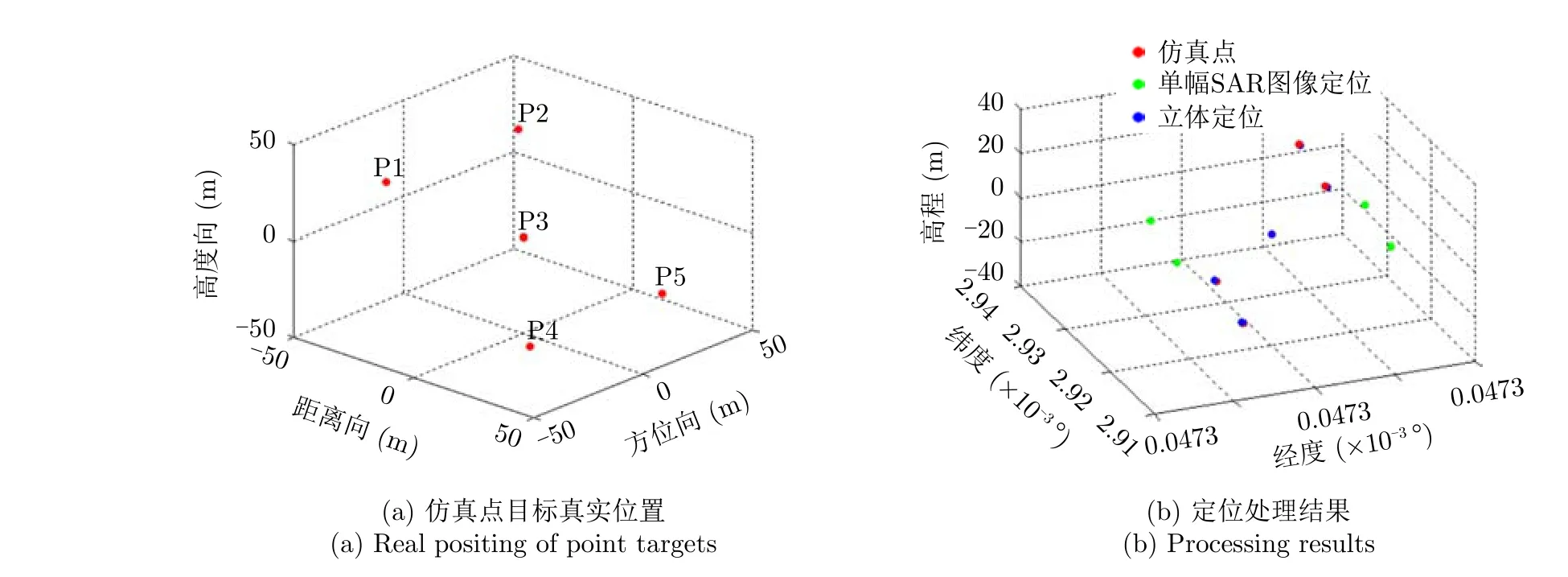
图24 立体定位仿真结果示意图Fig.24 Three dimension location results
4.8 多方位角观测星载SAR三维成像
层析合成孔径雷达技术(Tomography SAR,TOMO-SAR)的提出使得SAR在高度维方向不仅具有了高度测量能力,还同时具备空间分辨能力,可实现目标的三维成像。经典星载TOMO-SAR系统工作在正侧视条件下,利用多次航过获取的SAR图像序列实现目标三维成像。这种方式的缺点在于仅能获取方位正侧视条件下的目标三维信息,对目标侧面的信息描述不够;多方位角观测星载SAR系统利用多次航过,可获取不同方位角度的序贯图像序列。
和传统正侧视TOMO处理不同,为获取不同方位角观测角下的三维图像,需要将正侧视TOMO技术拓展到方位斜视观测的情况,处理获取不同方位观测角度下目标的三维图像,其核心是如何在斜视条件下实现TOMO成像,进而通过融合处理得高质量的三维图像产品。方位斜视TOMO和正侧视TOMO成像本质机理一样,但对配准精度要求更高。正侧视情况下,图像配准精度达到0.1个像素单元时,对三维成像的影响可以忽略。但在斜视条件下,多普勒中心频率较大,同样配准误差条件下引入的相位误差不可忽略,在大斜视条件下,对配准精度的要求提高1个数量级。
图25给出了多方位角观测星载SAR三维成像处理流程图,主要包括:多方位SAR图像立体定位、SAR斜视层析处理和多方位角三维点云融合处理3个步骤。其中,在融合处理中,首先将点云转换到同一坐标系下,得到几何校正后的三维点云,进而对不同方位角的三维点云在同一坐标系下进行融合。融合时可再划分三维网格,网格间距可依照三维分辨率设定,并根据目标点空间位置确定目标点所在网格。由于多方位角的三维点云存在重复目标点,当一个网格里面具有多个目标点时,则分别以这些目标点的幅度和几何位置参数的平均值当做该网格目标的幅度和几何位置参数。通过上述处理,得到多方位角三维点云融合图像。
为了验证方法的可行性,利用直升机模型进行仿真验证。图26(a)给出了直升机模型,图26(b)和图26(c)分别给出了方位正负45°条件下的三维处理结果,图26(d)给出了融合处理后的结果。从结果可以看出,通过融合不同角度下三维成像结果可更为精确的描述目标的细节特征,更有利目标的识别和确认。

图25 多方位角观测星载SAR三维成像处理流程Fig.25 The flowchart of three dimension imaging based on azimuthal multi-angles observation
5 结束语
本文对多方位角观测星载SAR技术进行了总结,分析了当前和未来高性能SAR卫星的工作能力,在此基础上介绍了基于多方位角观测的星载SAR工作新模式及处理方法,阐述了其在目标信息获取和图像质量提升等方面的应用,展示了初步的研究成果。可以预见,多方位角观测是星载SAR未来一种重要的工作方式,并将进一步向全方位观测方向发展,从而跨越式提升星载SAR图像产品的质量、任务响应速度和应用效益。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15 07:54:10
卷宗(2021年2期)2021-03-09 07:57:24
海军航空大学学报(2020年2期)2020-07-27 02:12:42
空间科学学报(2020年4期)2020-04-22 01:17:04
电子技术与软件工程(2017年12期)2017-07-05 13:53:25
电测与仪表(2016年14期)2016-04-11 12:32:48
中国卫生标准管理(2015年8期)2016-01-15 03:58:44
河南科技(2015年18期)2015-11-25 08:50:14
中国当代医药(2015年29期)2015-03-01 02:07:48
雷达学报(2014年4期)2014-04-23 07:43:09
