
感知-通信-计算融合的智能车联网挑战与趋势
2020-05-15 09:22
中兴通讯技术 2020年1期
(北京邮电大学泛网无线通信教育部重点实验室,北京 100876)
(Key Laboratory of Universal Wireless Communications, Ministry of Education, Beijing University of Posts and Telecommunications, Beijing 100876, China)
自动驾驶是提高出行效率、提升驾乘体验的主流技术。当前产业界,如特斯拉、UBER、谷歌WAYMO和百度等[1]争相开展自动驾驶技术的研究与测试工作,致力于将自动驾驶技术商业化。但是,现有自动驾驶技术主要依靠本地车辆的多种传感器。单车传感器在探测范围、精度、结果质量等方面受观察视角遮挡等因素的影响,感知能力有限,而且目前车辆传感器主要采用独立工作的方式,如利用摄像头进行图像识别,雷达进行速度和距离探测,车辆尚缺乏多种传感器数据有效深度融合的能力。在雨雪等复杂天气条件下,如果摄像头等某类传感器失效,本地车辆独立自动驾驶的安全性将受到严重威胁。这种现状限制了自动驾驶的发展,使之停留在L2、L3级别,即需要驾驶员高度参与控制的自动驾驶系统[2]。这种级别很难处理突发情况,驾驶员会因为过分信赖自动驾驶系统而引发交通事故[3]。
为了满足L4和L5级别自动驾驶的需求,必须解决现有单车感知能力不足的问题[4]。同时我们可以预见,未来将有越来越多的自动驾驶车辆投入使用。自动驾驶车辆组网的需求也会变得日益急迫[5],车间信息共享能力不足将严重制约自动驾驶技术的发展;因此,迫切需要研究自动驾驶单车多传感器信息融合新方法,以及基于感知-通信-计算融合的多车信息高效共享新技术,通过多车协同提升自动驾驶的安全性。
为此,本文中我们从L4/L5级别自动驾驶需求出发,面对多车感知数据融合与协同处理对多车协同组网以及分布式协同计算提出的需求与挑战,提出基于感知-通信-计算融合的智能车联网构建方法与设计思路。
1 多车感知数据融合与协同处理
1.1 多车协同组网需求与问题分析
通过车间通信来实现紧急事件预警的方法很早就被提出[6],然而利用车间通信来预警的方案迟迟没有获得广泛实施。由于缺乏通信和预警信息,当前自动驾驶汽车的安全性面临严峻挑战,在测试中事故频发。如2018年发生在美国亚利桑那州的UBER测试车事故[4],由于有限的探测能力以及通信协同能力的缺失,造成横穿公路的行人死亡。如果采用基于车间协同通信的预警方法,将有助于车辆提早获知危险信息,并有望避免此类事故的发生。
然而,现有车联网通信技术在一定程度上还无法满足面向大规模自动驾驶场景的大宽带、低时延、高可靠通信的要求。目前,全球车联网通信技术标准主要包括专用短程通信(DSRC)和蜂窝车用无线通信(C-V2X)2大主流技术标准。DSRC技术基于电气电子工程师学会标准(IEEE 802.11p)底层通信协议与IEEE 1609系列标准,仅支持3~27 Mbit/s传输速率,且在非视距环境下时延将急剧增大[7]。C-V2X在抗干扰能力、吞吐量以及非视距环境下的通信性能均优于DSRC技术。比起4G空口的长期演进(LTE)-V2X,基于5G新空口(NR)的5G-V2X性能将有大幅度增强,传输时延将降至毫秒级,单车上行传输速率为50 Mbit/s[8-9]。进一步,5G NR Rel16、Rel17将于2020年完成[10]。
但是,面向自动驾驶车辆的多种传感器产生的数据量是海量的。据测算,仅通过图像识别方式获取的单车数据速率将超过40 Gbit/s[11]。目前部署的5G移动通信系统的上行空口时延最低为4 ms[12],仍无法满足面向L4级别自动驾驶的需求——数据端到端传输和处理时延小于1 ms[13]。考虑到智能车联网节点数量多、环境高动态变化、车载传感器数据量大的特点,目前部署的5G移动通信系统性能较难满足面向自动驾驶的车联网的要求[12]。因此,当前移动通信技术在车联网系统中的部署与应用仍面临较大挑战,亟须研究面向自动驾驶的车联网通信的新方法与新技术。
1.2 传感器数据融合与共享利用的难题分析
尽管当前自动驾驶车辆已经搭载了多种传感器,如图1所示,包括激光雷达、毫米波雷达和摄像头等,产生大量感知数据,有效扩展了车辆的视野[14];但是当前缺乏对多种传感器感知数据的融合处理方法。我们亟须设计多种传感器数据的有效融合与联合处理方案,如摄像头和毫米波雷达感知信息的融合,可以综合利用目标形状、距离、速度等感知信息,实现对物体的精准定位与识别。在某些传感器工作受限的情况下,采用多种传感信息融合的方式可以极大地提高传感器综合性能,为特殊天气和时间条件下的行车安全提供进一步的保障。
现有车载传感器信息融合主要在空间域和频率域上实现,通过多尺度变换(MST)融合熵的方法[15]实现信息融合。该方法有4点不足:不同源数据在同一区域的特性不同,导致融合数据对比度下降;层次分解和类型的选择繁琐;MST方法计算复杂度高,不适合车联网实时信息处理的要求;伪吉布斯现象带来的误差或伪影问题严重[16]。为解决上述融合算法的诸多缺点,如何设计多传感器数据的有效融合方法,仍然是一个亟待解决的难题。
1.3 移动边缘计算与数据处理的需求分析
相比在路边固定部署的路侧单元(RSU)和基站等设备,车辆计算能力受限的问题更突出。然而,随着传感器的大量部署和传感器数据融合的需要,计算处理的数据量也十分庞大。且数据融合的算法(如MST算法)对车辆计算能力提出了更高的要求。因此,在当前环境下,车辆往往需要更强大的计算单元协作,才能有效完成数据处理。随着车联网规模和数据量的急剧增长,传统集中式运算和处理的方式已无法满足车联网的要求,面临诸多新挑战。虽然云端集中式处理和计算能力强,但是多节点间的通信传输性能与其计算性能并不匹配,极易出现数据拥塞的问题。此外,由于云端服务器的位置往往远离采集数据的车辆,数据传输必然会带来更大时延。当前部署的5G网络性能还未达到L4级别自动驾驶系统的要求,因此集中式计算和处理方式所造成的时延将会对车联网性能产生影响。
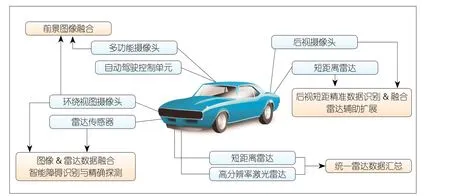
▲图1 自动驾驶车辆的多种传感器信息融合示意图
针对车联网感知信息共享的需求,移动边缘计算(MEC)技术有望解决车辆间传感数据分布式本地计算和处理的需求[17]。MEC使用位于RSU中的计算单元协助车辆进行计算,对于地理位置更靠近传感器数据源的RSU,车辆到边缘节点的通信时延相对可控。通过RSU协助计算,车辆间紧急数据的传输和处理时延有望满足L4级别自动驾驶的要求。结合云计算技术,通过将时延可容忍的数据上传到云端进行计算,实现云端、边缘与本地协同计算,提高车联网数据计算和处理的效率。
不过,当前MEC主要研究边缘节点计算能力提升的问题,通过提升算法性能来达到L4级别自动驾驶对计算能力的要求。然而,受边缘节点计算能力的限制,边缘节点计算资源调度和选择也是需要考虑的问题。节点的通信时延和计算时延将最终影响数据处理速度,因此需要研究最优边缘节点选择方案与多节点分布式协同计算方法,以提高多车协同的车联网整体计算效率,提升多车协同感知的信息融合性能。
如图2所示,图中蓝色车辆为参考节点,白色车辆为中继节点。RSU可以提供边缘计算功能,属于边缘节点。基站作为具备强大计算能力的中心,属于云端节点。每个节点都具备计算负载和通信负载2个负载属性。红、黄、绿3种颜色分别表示负载属性的拥塞、忙碌和空闲状态。车辆将数据传输至RSU进行边缘计算,基站、其他车辆等节点可以辅助车辆进行计算。边缘计算的结果回传至车辆,实现数据的高效处理。为了提高数据处理的效率,车辆应选择通信负载和计算负载较小的边缘节点进行辅助运算。如图中蓝色车辆因感知数据量过大,亟须其他车辆和RSU协助进行计算。通过对通信资源、计算资源及网络整体时延的评估,蓝色车辆的数据通过多跳转发给多个RSU进行并行协同计算。与此同时,蓝色车辆将时延容忍的数据上传给通信负载较小的云端基站进行计算。车辆对周边设备的负载状态信息进行测算,并选取最优转发目标。每个边缘节点在协同计算的同时,也会选择并行处理性能最优的设备协同进行数据处理,从而降低计算和通信时延。
2 基于感知-通信-计算融合的智能车联网构建方法与难题
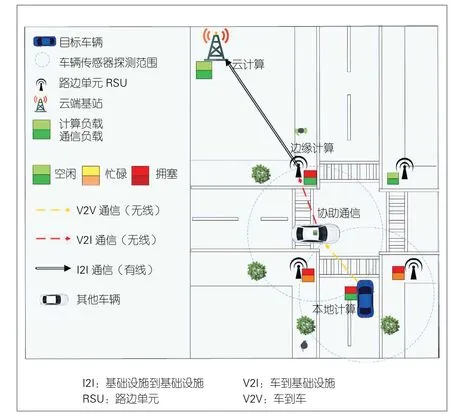
▲图2 车联网边缘节点协同计算模型
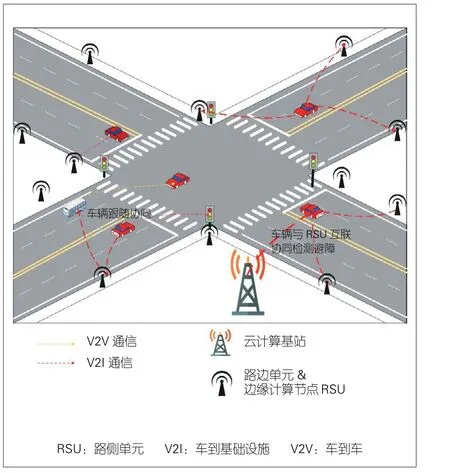
▲图3 基于感知-通信-计算融合的智能车联网系统
为了实现L4级别的自动驾驶,我们提出如图3所示的基于感知-通信-计算融合的车联网系统。在感知-通信-计算融合的车联网中,车辆需要具备车到车(V2V)、车到基础设施(V2I)、车到行人(V2P)等多种通信链路,实现车辆动态高效组网,以更好地提升自动驾驶车辆的安全性。
2.1 基于感知-通信融合的车联网
通过将部分车辆传感器(如毫米波雷达)与通信系统一体化设计,可以实现感知-通信技术的融合,优势具体如下:
(1)感知通信一体化实现高谱效、低时延信息共享。通信系统的时延加上单独的传感器感知时延,将进一步增大信息共享的时延,不利于保障信息传输的时效性。同时,为了消除传感器与通信设备间的相互干扰,传感器需要在时域或频域上与通信设备进行有效的信号隔离,这将导致信息传输的时效性和频谱利用效率受到影响。针对上述问题,我们提出了基于感知-通信融合的智能车联网系统。
(2)感知通信一体化提升无线网络容量。感知-通信融合的车联网传输方式,区别于传统移动通信网络广播通信方式,通过采用定向天线可以实现点到点的信息传输。随着车辆数目的增多,5G车联网的带宽资源不足,面临严峻挑战。通过采用点到点的定向通信方式,利用空间复用新维度,可以在空域波束正交且不产生干扰的情况下,进一步复用时频资源,提升无线网络容量[18-20]。
然而,车联网中应用定向通信也具有很大挑战。首先,定向通信要求发射机获得接收机准确的方位信息[21],这就要求发射机具备不断跟踪接收机方位的能力[22-23]。对于高动态智能车联网来说,这需要很强的波束控制能力。其次,定向通信需要符合空间正交分布特性的波束成形方案,或者为非正交波束成形方案提供干扰消除策略。此外,感知-通信融合的一体化设备天线设计、一体化信号设计等也是技术难题。
2.2 基于感知-通信-计算融合的车联网
随着车联网规模的扩大,车辆传感器采集的数据量也会随之增大,传感器采集的数据量将超过40 Gbit/s量级[11]。这个量级的数据如果直接通过通信系统传输将造成严重的拥塞。此外,计算单元,如中央处理器(CPU)、图形处理器(GPU)等的发展相对于传感器数据量的增长速度而言较为缓慢,仅靠单车的计算单元进行数据融合处理的难度将越来越大。传感功能将必然与利用RSU、基站等设备的协同计算进行一体化设计,以应对海量数据处理的需求[15]。
(1)数据融合降维:传感器数据可以进行融合,如将图片或视频数据通过识别算法后转化为目标的运动信息(如方向、位置和速度)及身份信息(如车型、车牌号等),减少了冗余信息,仅保留感知结果,从而极大降低传感器数据量的维度。
(2)数据融合扩展:多种传感器数据的融合可以扩展传感器的有效信息量。摄像头可以得到较大范围内的目标信息,包括目标的类型和大致位置,这将有效解决雷达的探测盲区问题。摄像头具有动目标检测能力,可对突发情况做出更快的处理,配合雷达精准探测的距离信息,可以更好地获取车辆周围的信息,保障行车安全。
(3)数据融合匹配:融合的数据可以为数据匹配提供依据。通常雷达通过反射信号进行测距,仅具备对目标位置、速度等信息的感知能力。摄像头作为成像设备,搭配识别算法可以做到对目标类型和身份等信息的感知。
此外,边缘计算技术可以为车辆间通信、波束分配方案、干扰和信号碰撞避免方案提供重要参考。通过计算,预先进行通信资源分配,将有效提升通信系统的效率,降低通信时延,从而为车辆快速高效动态组网提供有效保障。
感知-通信-计算融合的核心思想是将传感、通信和计算深度融合,实现3个功能间的相互协作、资源共享,提高多系统运行的智能化和自动化水平。车联网的感知-通信-计算一体化面临着诸多理论难题与技术挑战。首先,需要解决感知-通信-计算三者相互耦合与制约的理论难题。其次,需要研究感知-通信-计算一体化方式。考虑到车辆的移动性、车联网复杂的干扰特性、不同业务服务质量(QoS)的强差异性、车辆及RSU计算能力的差异性和计算单元的异构性等特点,如何在多车间实现云端、边缘端的通信、计算、感知资源与多样化业务的自主适配,如何在多维资源受限下实现车联网信息高效传递与低时延响应都是面临的技术难题。因此,我们亟须研究感知-通信-计算融合的智能车联网体系,设计支持多传感器数据融合、高速计算、智能决策、协同控制的智能车联网技术,解决自动驾驶车辆间多源海量异构数据高速处理、协同高效传输、低时延决策与控制等难题。
3 结束语
面向L4和L5级别高级自动驾驶的需求,本文中我们提出基于感知-通信-计算融合的智能车联网方案。该方案在单车上进行多传感器数据初步融合,并传输给周边车辆进行感知信息共享,实现多车数据融合。随着人工智能、自动控制与信息技术的深度融合发展,基于感知-通信-计算融合的智能车联网技术将向感知-通信-计算-控制融合演进。在车辆自感知和自学习能力的基础上,实现网络协同决策,最终实现具有高度安全性的L5级别的自动驾驶。
猜你喜欢
今日农业(2022年3期)2022-11-16
北京航空航天大学学报(2022年6期)2022-07-02
新班主任(2022年4期)2022-04-27
党的生活(黑龙江)(2022年4期)2022-04-25
现代电子技术(2022年8期)2022-04-13
现代电子技术(2022年4期)2022-02-21
电脑知识与技术(2021年22期)2021-09-14
电脑知识与技术(2021年22期)2021-09-14
花火B(2019年3期)2019-04-27
汽车观察(2019年2期)2019-03-15
