浅谈磁力仪结合多波束测深系统寻找
2020-05-13 14:10王文静董慧
航海 2020年1期
王文静 董慧
摘要:磁力仪能准确探测铁磁物质所引起的磁异常,且不受空气、水、泥沙等介质的影响,但由于其采用拖曳式测量,灵敏度高但定位精度较差。多波束测深系统测量过程中形成多个波束,可同时获得上百个水深点,实现水下地形的全覆盖测量,定位精度高但分辨率一般。结合磁力仪和多波束测深系统的特点,综合应用于海底金属障碍物的精确定位。应用结果表明,两者结合使用,大大提高了海底金属障碍物的判渎和定位的准确性,证明该方法具有一定的可行性。
关键词:磁力仪;多波束测深系统;海底金属障碍物;精确定位
0 引言
在寻找海底金属障碍物时,一般只清楚其所在的大致区域,其确切的位置需要通过测量手段获取,以便于标记或者打捞。磁力仪能准确探测铁磁物质所引起的磁异常,且不受空气、水、泥沙等介质的影响,灵敏度高,可有效感知海底金属障碍物,快速缩小障碍物的搜索范围,但受其测量方法影响,无法准确获知障碍物的位置。利用多波束测深系统的水深全覆盖特点,对磁力异常区域进行扫测,将扫测数据建立格网形成三维模型,在三维模型上寻找异常点并标记位置,从而获取海底金属障碍物的准确位置。
1 系统构成
磁力仪主要有拖鱼、控制器和定位系统构成,拖鱼内置姿态、方位等传感器,测量过程中可以实时了解拖鱼的方向、入水深度等参数。多波束测深系统由探头、定位系统、光纤罗经(提供姿态和艏向)、声速剖面仪、控制器和高性能汁算机构成。
2 作业流程
首先,利用磁力仪对存在海底障碍物的区域进行磁力值探测,探测完成后,利用HYPACK软件进行磁力值的色彩分區显示,在此基础上进行磁力异常区域的标记;其次,利用多波束测深系统进行磁力异常区域的扫测,并在扫测的数据基础上构建三维模型,在三维模型上寻找异常点并标记出准确位置;最后,结合两者的数据综合判断障碍物的形状大小和位置。
3 实例应用
3.1 控制点比对
测量前必须在控制点上进行GNSS接收机的比对,比对差值须满足测量规范要求。
3.2测线布设
磁法探测作业时按10m间隔布设测线,对实测时偏离计划线大于4m的测线进行补测,以确保整个测区探测无遗漏和对可疑目标的重复探测,满足规范要求。
待磁力异常区域确定后进行多波束测线布设,布设原则必须保证全覆盖测量,相邻条带搭接l0%以上。
3.3设备安装及要求
(l)磁力仪安装及要求
磁力仪采用船艉拖曳方式进行,施放过程中保持船舶3-4kn低速匀速前进。由于采用船舶材质为铁质,为消除船磁影响,保证施测效果,释放长度需要大于3倍船长。
测量前在现场准确量测出DGPS接收机天线位置与磁力仪在船艉入水点之间的水平距离,确定好GPS天线与磁力仪探头之间的固定偏差值,磁力仪施放完成后与导航定位系统联机调试,保证了导航定位输出的信号及磁力仪数据在磁力仪系统中正常的接收。
(2)多波束测深系统安装及要求
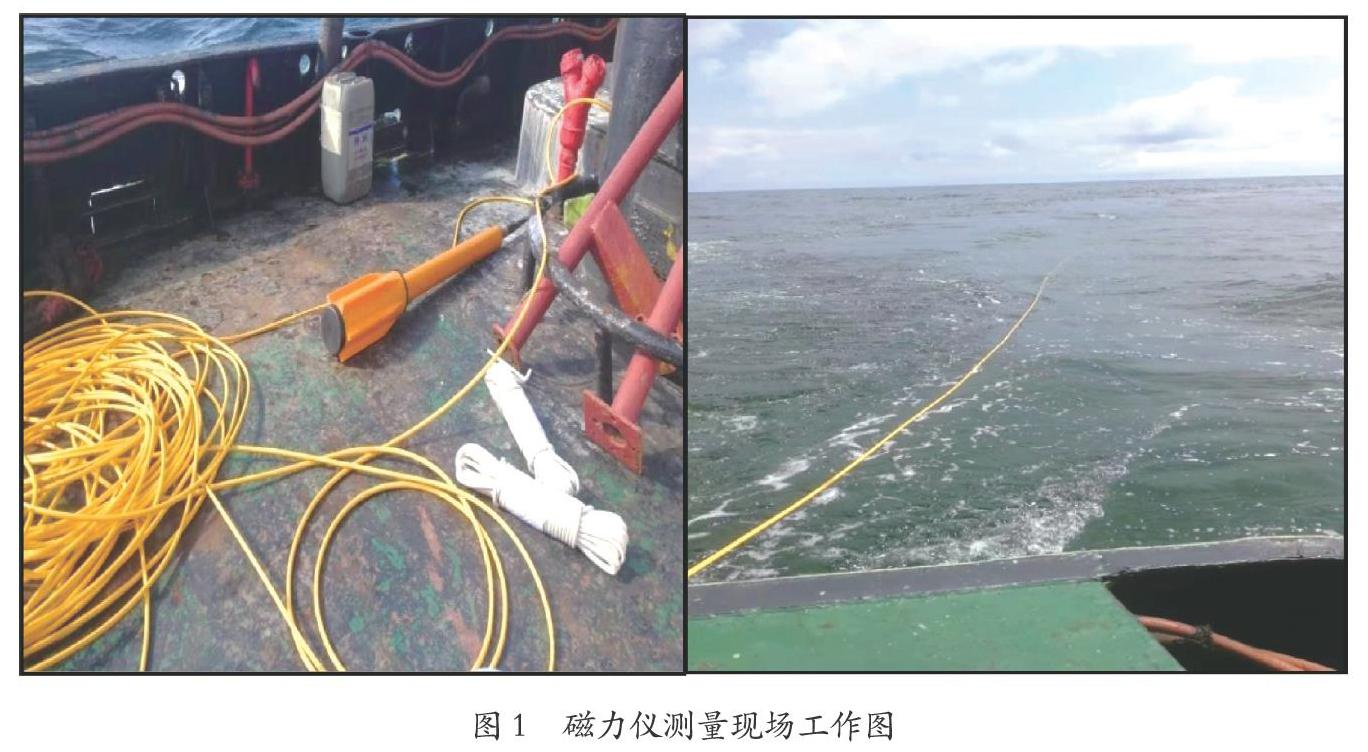
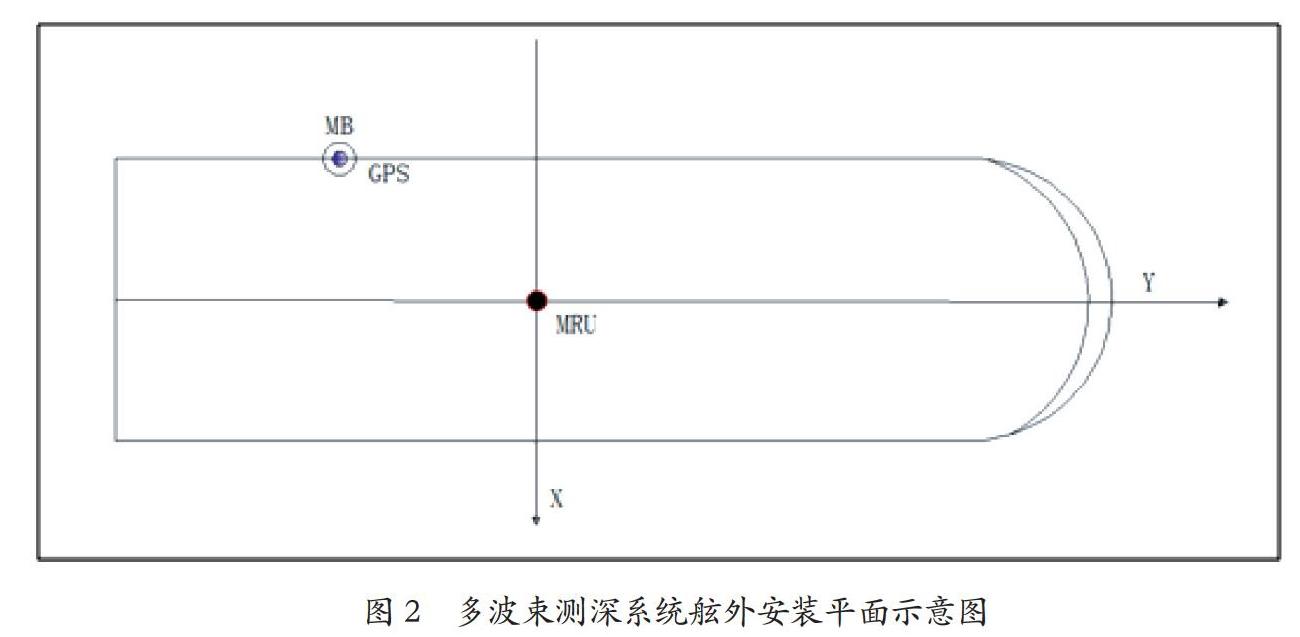
多波束换能器采用舷外临时安装方式,固定在距测量船艉li3相对稳定处;光纤罗经安装在船舶轴线中心位置,其方向线平行于船的艏艉线,方向指向船艏方向;GPS天线安装在换能器杆顶部。多波束测深系统舷外安装平面和侧面示意图见图2和图3。
船体坐标系的建立:以安装时换能器中心与水线的交点为船体坐标系参考原点;测船右舷方向为X轴正方向;测船船艏方向为Y轴正方向,垂直向上方向为Z轴正方向。船体坐标系建立以后,准确量取姿态传感器、光纤罗经、GPS天线、换能器在船体坐标系中的位置参数。位置参数量取时,读数至厘米,往返各一次,水平方向往返读数互差小于5cm,竖直方向往返读数互差小于2cm,限差范围内,取平均值作为量取结果。
3.4数据采集
(l)磁力仪数据采集
进行数据采集时,设置正确的工作参数,同时根据测区环境实时进行参数调整,保证最佳探测质量。在作业过程中确保船舶匀速直线航行,船舶航行速度为3-4kn。
采集过程中,测量人员实时查看数据采集界面,发现磁力异常跳点时,立即进行识别、标记。对于磁力异常区域,排除船舶掉头等影响后,需要对疑问区域进行加密测量,发现磁力异常的测线进行往返测量,以便分析、确定该磁力异常区域的范围。
(2)多波束测深系统数据采集
数据采集前,仔细检查系统设备是否工作正常;检查系统设备参数设置是否正确;检查测船坐标系统定义是否正确,系统设备安装偏移值是否输入正确;检查吃水改正、声速剖面文件、测量范围文件、导航测线文件等是否正确。
多波束测深系统采用约1:4宽深比进行作业,施测过程中按照要求进行声速剖面施测(剖面间距为0.5m),并及时在多波束测深系统实施改正。
数据采集中,实时监控系统各配套传感器状态、测深数据的覆盖和测深信号的质量情况。当测深信号质量不稳定时,及时调整了多波束发射与接收单元的参数,使波束的信号质量处于稳定状态。
3.5数据处理及成果分析 磁探测量完成后,将数据导出并进行编辑,生成的xyz文件
导入Hypack中,做成色块图加以区分分析,在排除船舶掉头等影响因素后,找出磁力值明显变化的区域并标记,如图4所示。确定好磁力异常区域后,对该区域进行一定程度的扩展,进行对应区域的多波束测深数据处理并生成水下地形的三维模型,找寻并标记出障碍物的准确位置,如图5所示。
应用实例表明,利用磁力仪结合多波束测深系统的方法是有效可行的,该方法利用了两种设备的特点,可以快速、高效的确定海底金属障碍物的准确位置,便于标识或者打捞。同时,在应用过程中发现,磁力仪设备对电压的稳定性要求较高,电压的波动很容易造成磁力值的异常变化,在今后的应用中需要多加注意。
猜你喜欢
地震地磁观测与研究(2023年3期)2023-10-19
河南科技(2022年22期)2022-12-26
传感器与微系统(2022年11期)2022-11-11
内燃机与配件(2022年2期)2022-01-17
声学与电子工程(2016年2期)2016-11-09
地质装备(2016年1期)2016-03-10
电源技术(2015年2期)2015-08-22
第二课堂(小学版)(2015年4期)2015-06-18
地震研究(2014年4期)2014-02-27
地质装备(2013年2期)2013-12-11