基于组态王的升降横移式立体车库的仿真
2020-05-08 10:19:14马振兴赵红玉霍大勇
科技创新与生产力 2020年4期
马振兴,李 宁,赵红玉,霍大勇
(喀什大学,新疆 喀什 844006)
在现代社会中,汽车已经成为每个家庭的刚需,汽车数量越来越多,导致很多平面停车场已经无法满足社会需求。随着自动化技术的进步,各种形式的立体车库应运而生。由于立体车库的建设条件受场所的影响,因此有很大的变动性,不同场所需要用到不同形式的立体车库,对立体车库设计和建设提出了更大的挑战[1]。
通过联合采用组态王6.55 工业组态监控系统软件与可编程逻辑控制器 (Programmable Logic Controller,PLC)进行升降横移式立体车库的仿真与模拟,提前发现程序、软件等方面的错误,缩短实际建设立体车库的调试时间。主要完成了3 层7 车位立体车库的存取车位移动方案设计和控制系统设计,通过硬件选择和PLC 软硬件设计,结合组态王6.55 工业组态监控系统软件,建立了数据词典、监控界面、动画连接、脚本编写、数据采集,完成了对升降横移式立体车库的自动存取车功能、升降横移系统、组态监控系统的模拟。
1 升降横移式立体车库的总体设计方案
1.1 升降横移式立体车库的结构及工作原理
图1 为升降横移式立体车库结构示意图。升降横移式立体车库结构包括控制系统、提升系统、安全防护、载车板、横移系统、结构框架[2]。
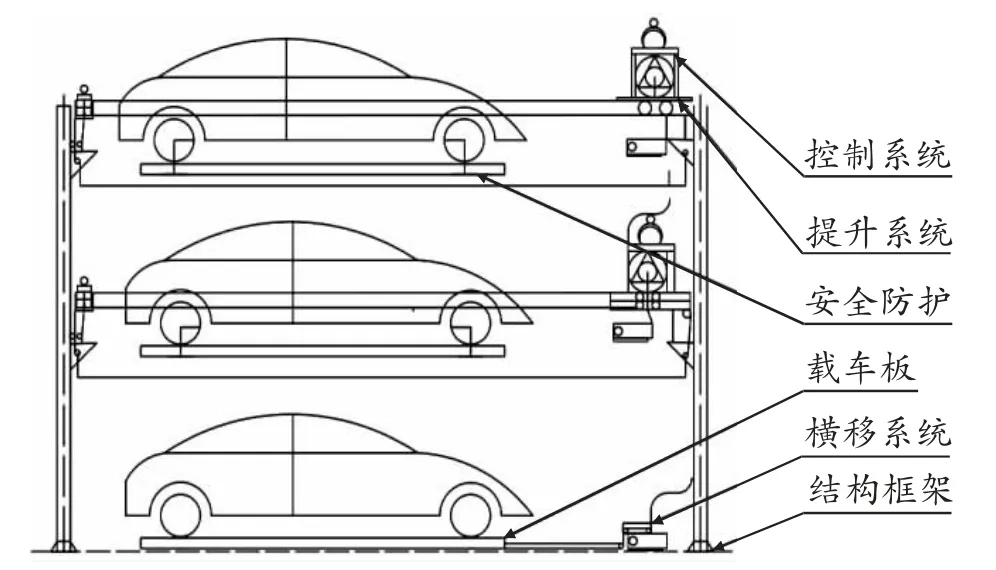
图1 升降横移式立体车库结构示意图
1.2 升降横移式立体车库的车位移动方案
本次设计的升降横移式立体车库共7 个车位,3层 3 列。1 号、2 号、3 号车位升、降,4 号、5 号车位升、降、横移,6 号、7 号车位横移。第59 页图2 为车位示意图。7 个车位移动方案相似,举例说明1 号车位存车与取车方案。
1 号车位存车时,4 号、5 号、6 号、7 号载车板各右移一个车位,1 号载车板释放防坠挂钩后下降两个车位,等待一段时间,车辆进入载车板,1号载车板上升至原位置后防坠挂钩吸合,4 号、5 号、6 号、7 号车位各左移一个车位,1 号车位存车结束。
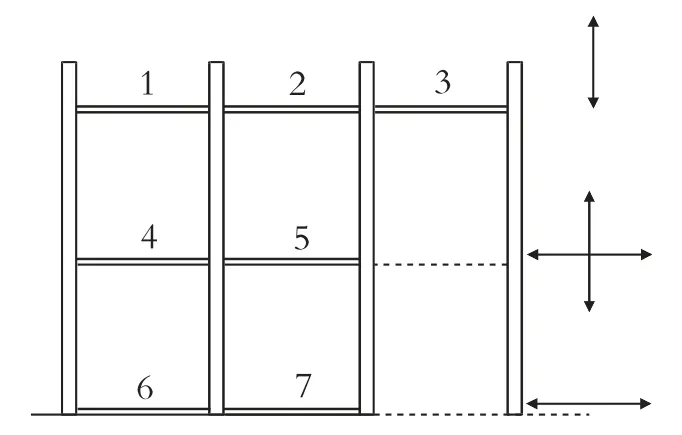
图2 车位示意图
1号车位取车时,4 号、5 号、6 号、7 号载车板各右移一个车位,1 号载车板释放防坠挂钩后下降两个车位,等待一段时间,车辆驶出载车板,1 号载车板上升至原位置后防坠挂钩吸合,4 号、5 号、6 号、7 号车位各左移一个车位,1 号车位取车结束。
1.3 升降横移式立体车库的总体控制方案
利用组态软件进行界面设计及动画连接,同时写入工程所需的变量、数据类型、寄存器、地址和设备对应连接序列,通过组态软件模拟发出停取车信号、传感器信号。完成以PLC 为核心的控制系统升降横移式立体车库的模拟仿真。
2 升降横移式立体车库的PLC 程序设计
2.1 PLC 的输入/输出点分配
PLC 的输入/输出点分配见表1。
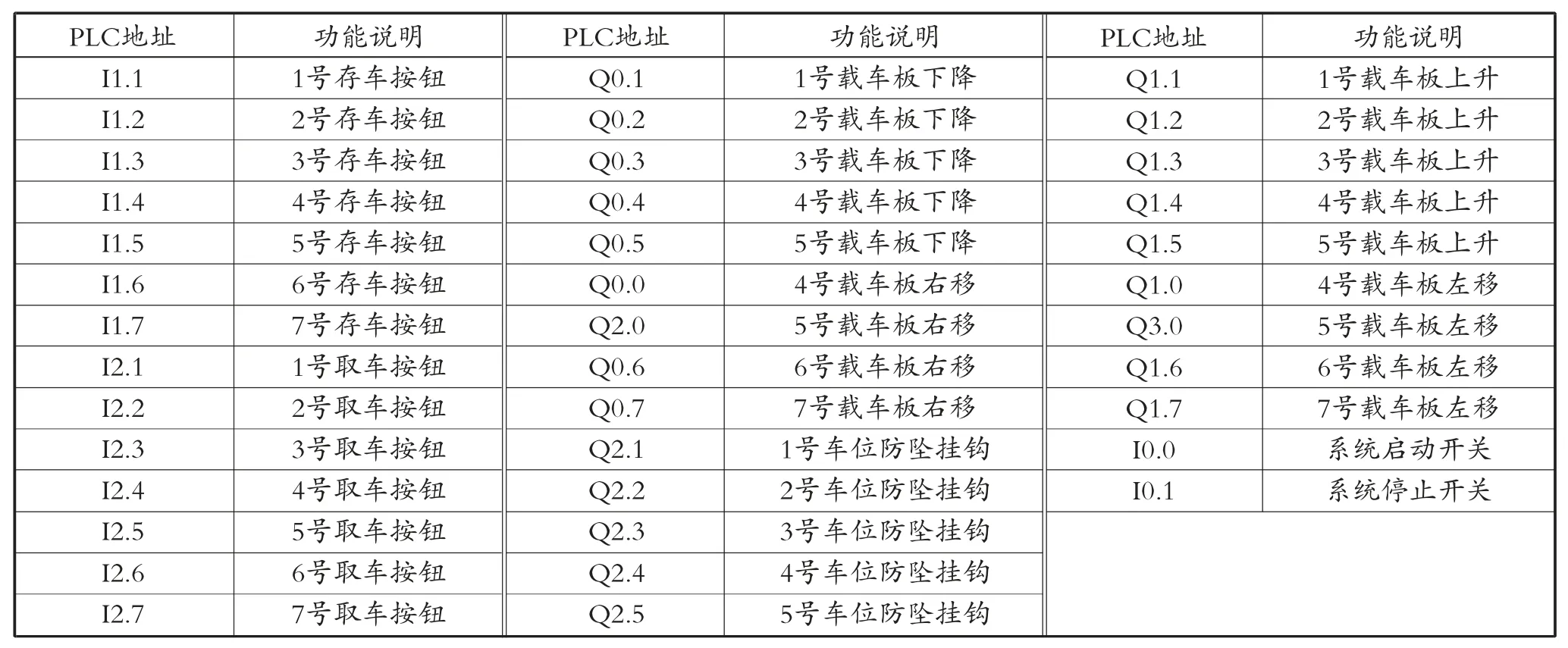
表1 PLC 的输入/输出点分配
2.2 存取车流程的PLC 程序设计
图3 为存取车流程图。按下存/取车位按钮,其他车位按钮锁定不能动作,此时下方载车板移开,同时继电器得电防坠挂钩收回,上方载车板下降,等待车辆进/出结束,载车板上升继电器失电弹出防坠挂钩,下方载车板归位。结束存/取车,自动复位,等待下一次存/取车。
3 升降横移式立体车库的组态系统设计
3.1 数据词典建立
组态王6.55 工业组态监控系统软件的仿真运行需要建立完整的工程数据库。控制人员可以在监控屏幕上对工作现场进行监控或者改变工作现场的工作状态。下达的指令可以传达给工作现场,立即使工作状态发生变化。要完成这些功能,必须建立数据库和数据词典,写入工程所需的变量、数据类型、寄存器、地址和设备对应连接序列是建立数据词典的关键[3]。
3.2 界面设计
通过界面设计,建立工程后设置动画属性,必须按照如下步骤:一是在词典中,定义变量和设置参数;二是进入工具箱,选择相应工具;三是进入工具箱,选择不同的工具画图。
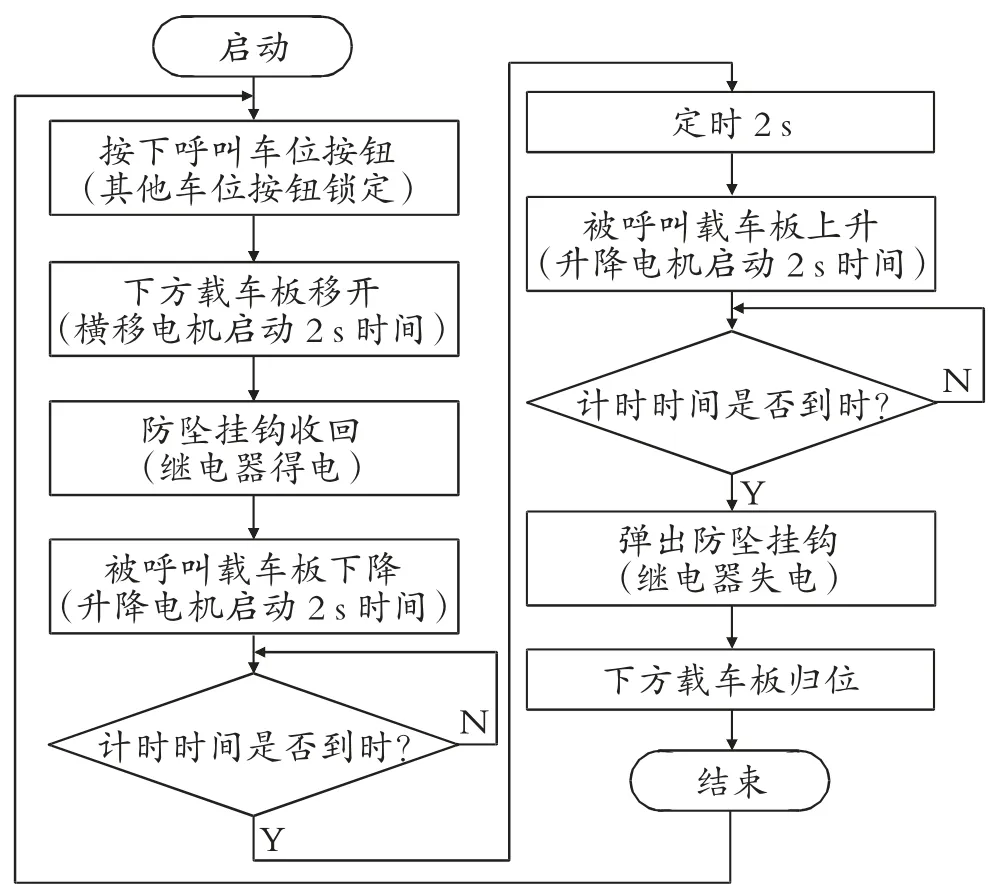
图3 存取车流程图
设计的立体车库监控系统界面见第60 页图4。
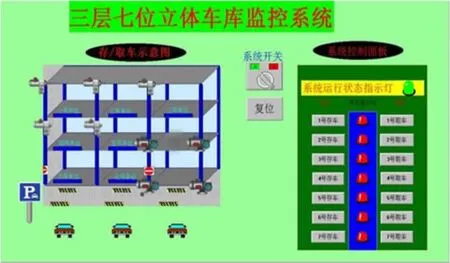
图4 立体车库监控系统界面
3.3 动画连接
动画设计可以真实地还原工作现场与工作状态。在不通过画面连接时,各个部分互不相干。当通过动画将其连接完成以后,各个部分便可构成一个相互作用的整体。
3.3.1 车位动画连接
以1 号车位载车板为例。要使1 号车位载车板工作,先在词典中选择1 号车位所对应的变量地址,再到动画属性处选择上下位移,在弹出的界面框中,采用表达式连接1 号车位。1 号车位动画连接界面见图5。
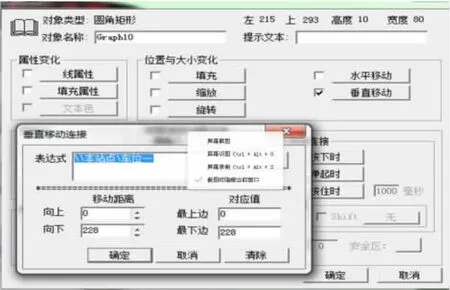
图5 1 号车位动画连接界面
3.3.2 车位脚本编辑
组态王6.55 工业组态监控系统软件的播放画面是一个连续完整的循环过程或者是按特定操作运行的过程。由于每个运行的步骤和各个组件之间都有特殊的联系并且相互作用,因此需要编写一个脚本。脚本是组态王6.55 工业组态监控系统软件的重要部分,脚本功能是将判断、函数等各种变量进行关联。以1 号载车板的移动脚本为例,车位脚本编辑界面见图6。
3.3.3 指示灯设置
在图库中找到指示灯,在实况图中需要指示灯的位置画下指示灯。双击指示灯使其连接变量,改变指示灯闪烁条件使其符合闪烁要求。指示灯设置界面见图7。
3.3.4 按钮设置
在工具栏中对按钮进行编写。双击按钮,先在动画连接界面中选择语言命令连接,再在命令语言框中对程序进行编写。按钮设置界面见图8。
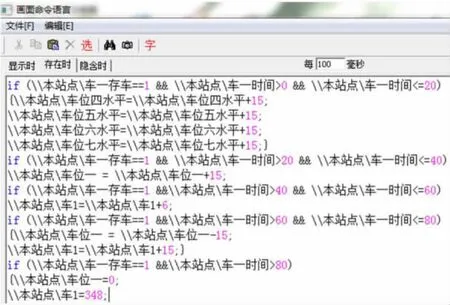
图6 车位脚本编辑界面
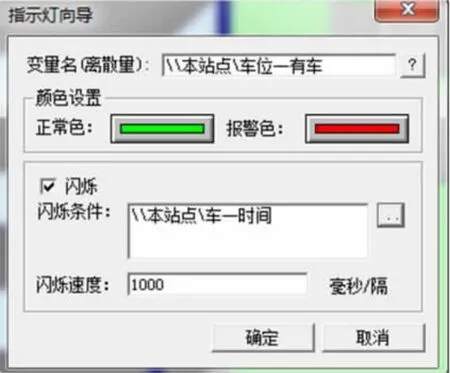
图7 指示灯设置界面
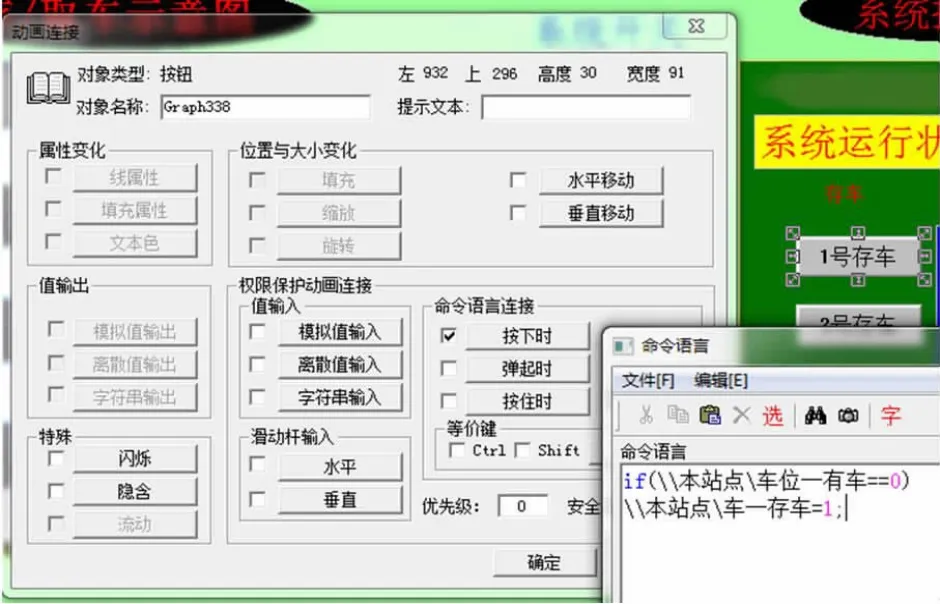
图8 按钮设置界面
3.4 组态仿真电机控制
通过组态王6.55 工业组态监控系统软件与PLC通信,先了解9 台电机的转动状态信息,再控制电机正反转。该立体车库设计所用的9 台电机为3×3立体形式。电机安装位置见第61 页图9。
以1 号车位动作为例,模拟1 号车位的存取车。当1 号车位动作时,电机6、电机7、电机8、电机9 正转。4 号、5 号、6 号、7 号载车板右移。电机1 正转,1 号载车板下降;电机1 反转,1 号载车板上升。电机6、电机7、电机8、电机9 反转,4 号、5 号、6 号、7 号载车板左移。分别通过模拟动画上的红色和绿色来模拟电机启动和电机停止,红色为电机不工作,绿色为电机正常运行[4]。
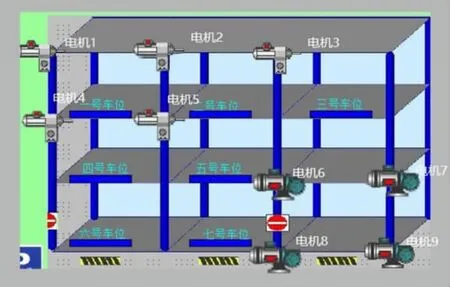
图9 电机安装位置
4 升降横移式立体车库的仿真
4.1 组态王和PLC 的通信
组态王6.55 工业组态监控系统软件和PLC 建立通信,先把PLC 设定为RUN 状态,在打开组态王6.55 工业组态监控系统软件设置自定义设备[5-6]。其步骤如下:一是双击已经定义的设备;二是操作西门子S7-200 PLC;三是操作自由口;四是设置COM 口,与电脑上的PPI 通信线的COM 口一致。
通过这4 个步骤完成设置,这时运行组态监控系统,查看通信是否成功,同时注意运行程序时将运行的画面重新保存,可通过这种方式避免画面不按照命令语言正常运行的现象发生。
4.2 调试运行结果
将西门子S7-200 PLC 与组态王6.55 工业组态监控系统软件调试的系统连接成功,正常运行时系统开关会根据不同状况进行改变。系统运行时指示灯显示绿色,系统停止时指示灯显示红色闪烁。
假设按下1 号存车按钮,运行存车程序,车位显示红灯亮。当小车进入载车板时,车位显示红色闪烁,示意车辆正在存车。在立体车库监控系统界面中,模拟电机使载车板升降横移。复位按钮可以实现系统的重置。立体车库监控系统界面可以显示存取车时间,以便计数。PLC 硬件配有急停系统操作,在实际使用中急停开关只能由专业人员控制。再次启动开始按钮,系统运行重新开始。
5 结束语
本文根据升降横移式立体车库的工作原理,完成了控制过程设计,给出了通过西门子S7-200 PLC控制立体车库的存取车过程的方法,实现了3 层7 车位立体车库的存取车位移动方案设计和控制系统设计,包括系统整体结构设计、原理研究设计、硬件选择、PLC 程序设计等,结合组态王6.55 工业组态监控系统软件,基于Windows 平台的仿真系统,建立了数据词典、监控界面、动画连接、脚本编写、数据采集、PLC 通信,并在此基础上进行调试,设计了组态仿真系统,完成了对升降横移式立体车库的自动存取车功能、升降横移系统的模拟仿真。未来可通过考虑增加有车无车信息、限位信息、是否车辆超高信息、是否车辆停位置适当等信息开展更多必要常用功能的模拟仿真。
猜你喜欢
电子制作(2017年2期)2017-05-17 03:54:53
电子制作(2017年23期)2017-02-02 07:17:16
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27 06:31:45
武夷学院学报(2015年3期)2015-07-18 11:03:48
河南科技(2015年8期)2015-03-11 16:23:55
汽车维护与修理(2015年3期)2015-02-28 12:16:00
汽车零部件(2014年10期)2014-11-11 12:25:06
汽车维修与保养(2014年12期)2014-04-18 14:14:15
机电产品开发与创新(2014年6期)2014-03-11 16:42:57
汽车维护与修理(2014年10期)2014-02-28 12:15:00