
便携式智能平衡车的开发与设计
2020-05-06 09:09王云鹏吴桐郭梦慧梁家豪郝亮
汽车实用技术 2020年6期
王云鹏 吴桐 郭梦慧 梁家豪 郝亮

摘 要:目前,人类的出行越来越多的依靠代步机器,在代步工具中平衡车又是人们心中的最佳选择。但代步工具的安全问题是人们关注的重点。针对于一种安全系数比较高的出行代步工具是目前产品生产的重中之重。因此,针对平衡车使用的安全问题进行建模研究,进一步提高平衡车安全性能。应用超声波探测装置对路面及其前方路况进行采集,使用STM32微控制器为控制核心,搭载系统的各部分硬件及相关的控制电路对所采集的信息进行解析,处理。对危险状况进行避让。本系统带有GPS定位系统和蓝牙连接组件,针对于平衡车使用者出现以外情况可自动进行呼救。本设计具有研发成本低,实用性强,将会在未来人们的出行中起重要作用。并将得到更多的社会实际应用普及。
关键字:平衡车;STM32微控制器;安全出行;超声波探测装置;GPS定位系统
中图分类号:TN924 文献标识码:B 文章编号:1671-7988(2020)06-47-03
Abstract: At present, more and more human travel depends on the walking machine, and balancing the car in the walking tool is the best choice in people's mind. But the safety of the step tool is the focus of people's attention. At present, the most important part of product production is a kind of travel substitute tool with high safety factor. Therefore, the safety problem of the balanced vehicle is modeled to further improve the safety performance of the balanced vehicle. The ultrasonic detection device is used to collect the road conditions and the road conditions in front of the road. The STM32 microcontroller is used as the control core. The hardware of each part of the system and the related control circuit are carried to analyze and process the collected information. Avoid dangerous situations. The system is equipped with GPS positioning system and Bluetooth connection components, which can automatically call for help in case of other situations. This design has the advantages of low research and development cost, strong practicability, and will play an important role in people's travel in the future. And will get more social practical application popularization.
Keywords: Balance car; STM32 microcontroller; Safe travel; Ultrasonic detection device; GPS positioning system
CLC NO.: TN924 Document Code: B Article ID: 1671-7988(2020)06-47-03
前言
隨着人工智能的快速发展、智能家居、智能无人车等的兴起,给社会带来了前所未有的快捷与便利。人类出行过多依靠于代步机器。其中平衡车又是人们出行的心仪之物。
本设计采用微控制器技术,通过搭配各种硬件模块,来实现平衡车的运行。以及安全性能的提高,从而保证使用者的人身安全,对用户负责。
目前市面上的平衡车只能提供代步功能,而不能再有紧急路况时提供躲避的功能,也不能在意外发生时第一时间提供呼救。
1 平衡车总体设计
将超声波探测装置布置在平衡车的前端,来进行前方路况的实时监测,以保证行驶的安全性。以GPS定位模块为中心,以蓝牙模块[1]连接手机为辅助,当发生意外情况时,GPS定位模块定下自身所在位置以蓝牙模块传给手机,手机以彩信的形式发送给交警进行求救。为了提高工作效率,将主程序分为模块化进行编写。
本产品选用STM32微控制器作为中心控制器,由多种模块进行信号采集,重心控制器进行处理。
2 主要硬件设计
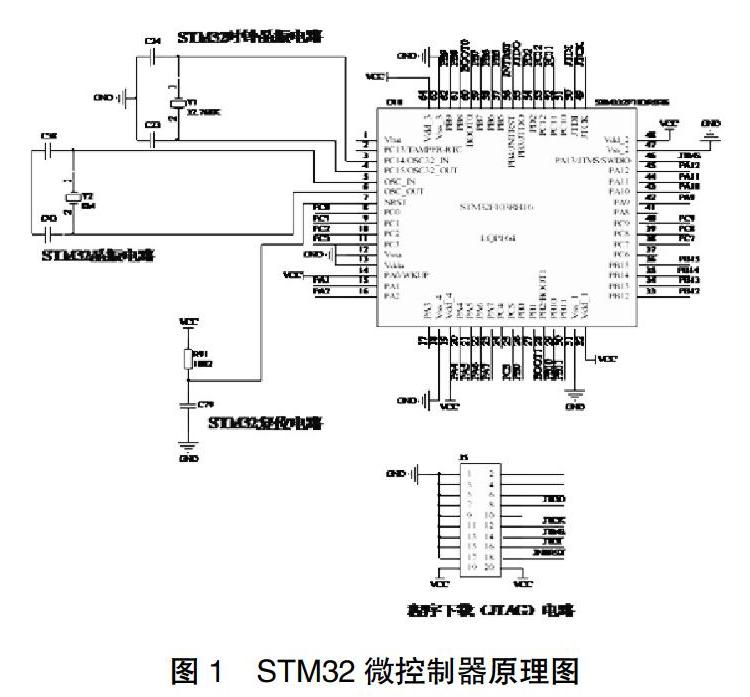
2.1 STM32微控制器
对于本平衡车来说,微控制器最小系统是整个平衡车运行和工作的基础,因此这里设计了基于STM32微控制器的最小系统。设计原理图如图1所示:
2.2 超声波探测装置
本设计采用IO触发测距,触发信号输入端(Trig)输入一个10微秒以上的高电平信号,超声发送口收到信号自动发送8个40Hz方波,同时启动定时器,待传感器接收到回波则停止计时并输出回响信号,回响信号脉冲宽度与所测距离正比。根据时间间隔可以计算距离,公式:距离=(高电平时间*声速)/2。
2.3 GPS定位系统
对于用户使用安全问题的解决,一是依靠超声波检测装置的自动探测路面状况来进行保护;二是在危险已经发生时GPS定位系统的自动定位功能进行求救。本设计中的GPS探测装置采用的是高灵敏度GPS[4],此装置会在意外发生的第一时间进行自我求救。
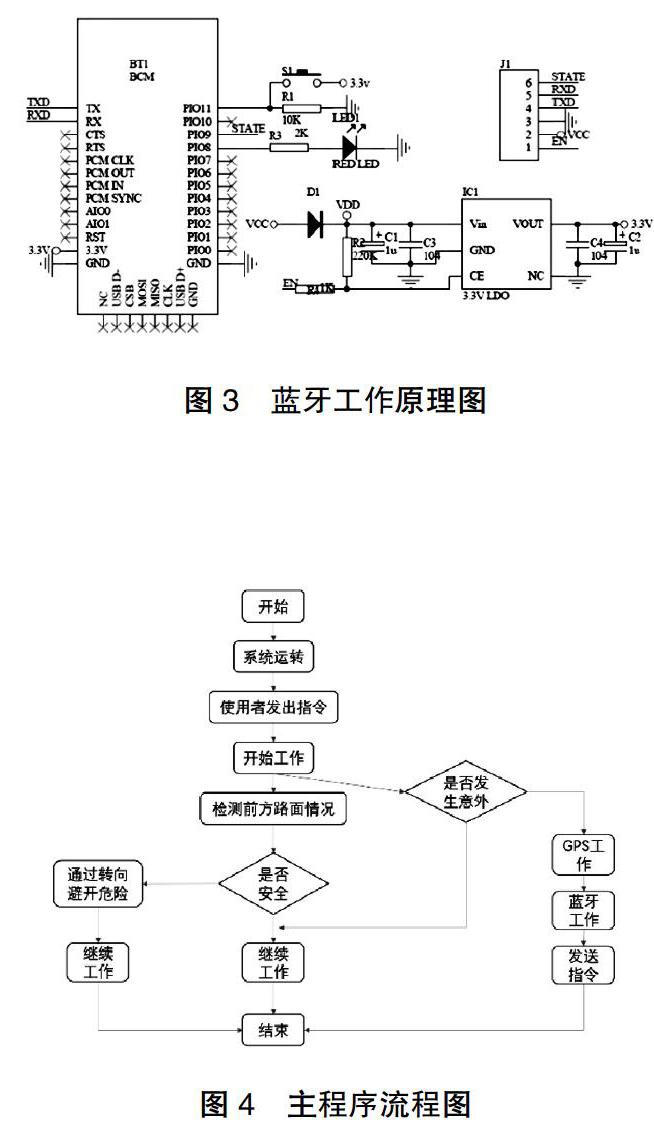
2.4 蓝牙模块
采用一款高性能的蓝牙串口模块,此模块具有两种工作模式:命令响应工作模式和自动连接工作模式。该蓝牙的工作原理如图3所示:
3 系统软件设计
本系统使用嵌入式C语言[2]编写的,由主程序来实现针对每一个的模块不同指令的发号。主程序的流程图如图4所示。该程序采用模块化的设计思路[5]来编写各个子程序。
4 系统硬件设计
使用CATIA构建整体模型,将平衡车运动形式输入到CATIA中进行数字化仿真模拟。同时模拟各种路面的情况以及各种可能发生的以外情况。以硬件软件共同结合进行调试,让平衡车实现预期的功能。
5 结语
对于各个用户使用平衡车的情形的不同,我们通过对各个用户使用平衡车的习惯,来搭建模拟路况,以更好的进行程序调试。本平衡车十一微控制器为控制核心,多种模块的联合工作,以保证使用者的人身安全。本平衡车满足人们心中所需,具有良好的市场价值,走在未来平衡车发展的前沿。
参考文献
[1] 谭康喜.低功耗蓝牙智能硬件开发实战.人民邮电出版社,2018: 246~272.
[2] Prata[美].C++ Primer Plus(第6版)(中文版).人民邮电出版社,2012:第7章.
[3] 谢钢. GPS原理与接收机设计. 电子工业出版社,2017:129~152.
[4] 任胜兵,邢琳.软件工程[M].北京:北京邮电大学出版社,2004: 132~143.
猜你喜欢
科教导刊·电子版(2020年19期)2020-10-09
中国信息化周报(2020年15期)2020-05-11
山东工业技术(2019年19期)2019-07-22
记者摇篮(2018年7期)2018-10-30
记者摇篮(2018年7期)2018-10-30
科技创新与应用(2017年9期)2017-04-26
中国高新技术企业(2015年23期)2015-06-24
移动通信(2011年23期)2011-02-06
现代电子技术(2009年9期)2009-06-25
