
用于组合导航系统的三轴地磁导航传感器设计
2020-04-30 06:49金海红吴东升范之国
无线互联科技 2020年6期
金海红 吴东升 范之国


摘 要:文章针对仿生偏振光/地磁/惯导多源信息组合导航系统中的地磁导航需求,设计了一种三轴地磁导航传感器。介绍了应用背景、设计需求与实现方法,进行了系统的误差分析,并针对不同误差来源,进行了标定测量与补偿,实现了三轴姿态角的动态测量,为多信息源融合下的导航系统提供了一种获取地磁导航信息的有效手段。
关键词:磁阻传感器;地磁导航;加速度计;组合导航
1 导航技术
导航技术在航空、航天、航海等领域是不可或缺的关键技术。地磁导航是利用地球磁场矢量来确定方向的一种古老导航方法,如今,仍然在很多场合发挥着重要的作用。但是,地磁导航也存在容易受到外界环境干扰等诸多不足,因此,设计抗干扰性强的地磁传感系统和有效的误差控制方法,是各种地磁导航应用的关键。随着组合导航技术的不断发展,多信息源组合导航越来越凸显其技术优势[1]。仿生偏振光导航通过对大气偏振模式的检测和演算,实现对载体姿态信息的判断,是一种自主导航方法[2]。仿生偏振光导航、地磁导航与惯性导航三者导航方式优势互补[3-4],可以构成组合自主导航系统,为解决卫星信号拒止环境下的自主导航,提供了一种可行的技术途径。
本文针对仿生偏振光/地磁/惯导多源信息组合导航系统中的地磁导航需求,设计了一种基于磁阻技术的三轴地磁导航传感器,为多信息源融合下的自主导航系统提供一种有效的地磁导航辅助信息。组合导航系统集成了偏振光、地磁、惯性导航传感器,是以核心信号处理与控制单元为中心,将各导航传感器送来的信息加以综合和最优化处理,然后对导航参数进行综合输出。其中,组合导航系统中的地磁导航传感器利用地球磁场通过自身的磁强计测量载体所在位置的地磁场矢量,计算出相应载体的三轴姿态。根据平台系统的成本、体积及使用范围等综合考虑,本文地磁导航传感器系统的设计要求为:实现三轴姿态实时动态测量。其中,航向角输出绝对精度为2 o;俯仰角及横滚角在﹣60~+60 o的范围内的输出绝对精度为1 o。
2 地磁导航传感器的硬件设计
2.1 三轴姿态信息获取
地磁传感器的实现方式有线圈式、磁通门式、霍尔式、磁阻式等多种,目前采用最多的是磁通门式和磁阻式两种。磁阻式传感器因其全固态、内部无转动部件、尺寸小、抗干扰性强等特点得到广泛应用[5-6]。因此,本系统采用磁阻式设计三轴地磁导航传感器。
地磁传感器主要是利用磁阻效应感测地球磁场来确定罗盘航向。选用霍尼韦尔公司的各向异性磁阻传感器HMC1052,HMC1051Z组合作为三轴地磁传感器。HMC1052测量地球磁场在X,Y轴的分量,HMC1051Z测量地球磁场Z轴分量。每个电桥输出是一个与感测磁场强度和电桥电压成正比的差动输出电压信号,分别用Vx,Vy和Vz表示,该信号经放大后送入微处理器,进行模数转换及数据处理。采用ADI的双轴加速度计ADXL202,任何方向的加速度都会使ADXL202内部的多晶硅结构偏移,使得中心极板产生电压变化,其幅值与该测量轴的加速度成正比,微处理器计算加速度计中X与Y轴上输出信号占空比ηX和ηY,利用式(1—2)即可得到俯仰角(θ)与横滚角(),式中,η0为水平占空比,S为灵敏度[5]。
(1)
(2)
当传感器处于水平放置时,航向角α可用式(3)计算:
(3)
大多数情况下传感器并不是在水平面上,此时,需要利用加速度计测得的倾角,对非水平姿态下的航向角进行倾角修正,如式(4—5)所示,其中,XH和YH为折算到水平面上的X轴与Y轴的磁场强度:
(4)
(5)
通过倾角计算、坐标变换得到的地磁航向角,再经过修正得到地理航向角,如式(6—7)所示,其中,α'地理航向角,β为磁偏角[5]。
(6)
(7)
最后,姿态信息以数字输出的形式通过串口/USB送至导航系统中的控制与处理中心,可以通过LCD液晶显示屏实时显示,系统组成框架如图1所示。
2.2 电路设计
为了方便调试与功能扩展,三轴地磁导航传感器采用子母板的层叠设计方式。子板由C8051F320控制的传感器独立功能模块组成,主要包括磁阻传感器电路和ADXL202加速度计电路,电路设计如图2—3所示。母板主要包括電源、各种调试与功能扩展接口等电路。
电源是系统可靠稳定运行的关键因素之一,系统设计了模拟电源、数字电源和备用电源。根据系统负载情况,数字和模拟电源选用线性稳压器件实现,提供3.3 V,2.5 V等多种稳压电源。如图3所示,两路主电源的输入端经电压比较器控制电源继电器的通断,并将此控制信号输入MCU的I/O口,告知MCU电源状况,如果主电源的任意一路掉电则会自动切换备用电源,备用电源系统是在主电源缺失情况下的应急电源,也是电池电源系统。
3 导航传感器系统的软件设计
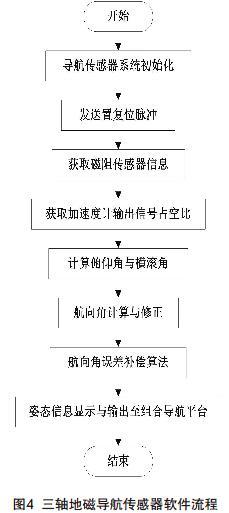
导航传感器系统软件的主要任务是通过对硬件系统的控制,获取传感器信息,进行信号处理,输出传感器获取的三轴姿态信息。采用模块化设计,分为主程序和各功能模块子程序。主程序负责整个系统对子程序的响应和调用,有效地管理系统软、硬件资源。子程序完成指定功能,并供主程序调用,主要包括初始化、磁阻传感器信号采集与滤波、加速度计信号获取、倾角信息计算、航向角计算与误差补偿、显示与发送等,总体流程如图4所示。
导航传感器开始工作后,首先,进行系统初始化,包括系统软硬件资源和静态工作参数等信息的配置;其次,向磁阻传感器发送置/复位脉冲,对磁阻传感器与加速度计的实时信息进行数据采集、滤波,再进行姿态解算;再次,运行误差补偿算法;最后,将系统获得的实时姿态信息输出至组合导航系统中的控制与处理中心。另外,传感器失调、温度漂移以及硬铁和软铁干扰会造成误差,将传感器在置位和复位情况下得到的信号求平均值,即可得到由于失调和漂移造成的直流偏置信号,在航向角计算前对该偏置信号进行补偿即可消除其影响。
4 系統的误差分析与标定
4.1 误差分析
在地磁导航传感器通过软硬件调试后,能够实现姿态感知的功能,但是由于制造、安装和环境的影响,姿态信息存在很大误差,影响导航的精度及稳定性,需要分析影响传感器稳定性和精度的误差因素。
造成地磁导航传感器误差的原因主要包括两类[6-7]。一类是系统自身存在的误差,包括制造误差、安装误差;另一类是由传感器使用环境因素造成的系统环境误差。对于第一类误差,可通过硬件手段和系统合理的标定,使误差控制在一定范围内。在保证芯片筛选、垂直安装、信号隔离等措施之后,对系统测量结果影响最大的就是传感器的基准电压和加速度计中的X,Y轴的水平占空比η0与灵敏度S等参数,需要进行系统的标定测量,以确定其具体数值。对于第二类误差,需要通过相应的误差补偿算法来降低系统环境所导致的影响,可采用自差粗校正法、粒子群优化、最小二乘补偿等方法[7-9]。本文针对基准电压与加速度计中的参数,进行实际标定测量。
4.2 标定方法与结果
磁阻传感器中放大器的参考电压设计了2.5 V基准,但实际电路存在一定偏差。为了找到实际的X,Y轴的基准电压,要进行基准电压的标定。将传感器固定在高精度水平旋转转台上,每隔10°测量X,Y轴由单片机模数转换后的电压采样值,对磁阻传感器的水平轴输出电压量进行大量反复测量实验。最后,标定出水平轴X,Y轴基准电压分别为:Vrefx=2 345 mV,Vrefy=2645 mV。图5为实验室无设备干扰(停电)情况下的一次测量结果。
加速度计中的参数也要进行标定。首先,标定X轴参数,测得一个正向重力加速度时的占空比54.2%,测得一个反向重力加速度时的占空比32.2%,灵敏度SX=(54.2%﹣32.2%)÷2 g=11%/g。因此,传感器水平放置不承受加速度时的X轴水平占空比η0X=54.2%﹣11%=43.2%。其次,标定Y轴参数,测得正向重力加速度时的占空比62%,反向重力加速度时的占空比如40%,灵敏度SY=(62%﹣40%)÷2 g=11%/g,Y轴水平占空比η0Y=62%﹣11%=51%。上述加速度计参数的标定也需要经过多次反复的测量,最终完成标定,并将X,Y轴水平占空比和灵敏度的标定值代入式(1—2)中。在对加速度进行标定后,测得倾角信息的实验显示在-60~+60 o的有效测量范围内,俯仰角及横滚角的绝对误差均不超过1 o,达到了设计要求。
针对环境误差对航向角的影响,导航系统对传感器信号采用椭圆误差补偿算法进行实时误差补偿,航向角的一次测量结果如图6所示,补偿后的最大绝对误差小于2 o,平均误差为1.27 o,误差标准差1.35 o。
5 结语
本文设计了一种基于磁阻技术的三轴地磁导航传感器系统,介绍了其应用背景与设计要求、实现与误差分析方法,并进行了标定和误差补偿。实测结果表明,本文设计的三轴地磁导航传感器系统实现了航向角、俯仰角和翻滚角的动态测量,达到了仿生偏振光/地磁/惯导多源信息组合导航系统对地磁导航传感器的指标要求,为多源信息融合下的自主导航系统提供一种获取地磁导航辅助信息的有效手段。
[参考文献]
[1]李镇,王海涌,靳宇航,等.一种弹道导弹捷联惯导/地磁组合导航方法[J].中国惯性技术学报,2015(5):636-641.
[2]高隽,范之国.仿生偏振光导航方法[M].北京:科学出版社,2014.
[3]卢鸿谦,尹航,黄显林.偏振光/地磁/GPS/SINS组合导航方法[J].宇航学报,2007(4):897-902.
[4]朱占龙,单友东,杨翼,等.基于信息正交性自适应滤波的惯性/地磁组合导航方法[J].中国惯性技术学报,2015(1):66-70.
[5]杨晓东,王炜.地磁导航原理[M].北京:国防工业出版社,2009.
[6]GOLDENBERG F.Geomagnetic navigation beyond the magnetic compass[C].San Diego:Position Location & Navigation Symposium IEEE/ION. IEEE,2006.
[7]王齐贤,李东光.基于粒子群优化的地磁传感器非对准误差校正方法[J].探测与控制学报,2019(5):11-16,24.
[8]WAHDAN A,GEORGY J,ABDELFATAH W F.Magnetometer calibration for portable navigation devices in vehicles using a fast and autonomous technique[J].IEEE Transactions on Itelligent Transportation Systems,2014(5):2347-2352.
[9]方旭,王良明.地磁传感器标定方法研究及数值模拟[J].弹箭与制导学报,2018(1):73-76.
Design of three axis geomagnetic navigation sensor for integrated navigation system
Jin Haihong1, Wu Dongsheng1, Fan Zhiguo2
(1.School of Electronic and Information Engineering, Anhui Jianzhu University, Hefei 230601, China;
2.School of Computer Science and Information Engineering, Hefei University of Technology, Hefei 230601, China)
Abstract:In this paper, a three-axis geomagnetic navigation sensor is designed to meet the needs of geomagnetic navigation in the multi information source integrated navigation system of bionic polarized light, geomagnetic and inertial navigation. The application and design requirements and implementation methods are introduced. The error analysis of the system is carried out, and the calibration measurement and compensation are carried out according to different error sources. The dynamic measurement of the three-axis attitude angle is realized, which provides an effective means to obtain the geomagnetic navigation information for the navigation system under the fusion of multiple information sources.
Key words:magnetoresistive sensor; geomagnetic navigation; accelerometers; integrated navigation
猜你喜欢
中国特种设备安全(2021年5期)2021-11-06
防爆电机(2021年4期)2021-07-28
新世纪智能(高一语文)(2021年3期)2021-07-16
民用飞机设计与研究(2019年4期)2019-05-21
中国惯性技术学报(2017年1期)2017-06-09
电子设计工程(2017年20期)2017-02-10
电子制作(2017年24期)2017-02-02
光学精密工程(2016年5期)2016-11-07
电机与控制应用(2015年1期)2015-03-01
法大研究生(2015年2期)2015-02-27
