
智能船舶背景下《1972年国际海上避碰规则》的修正
2020-04-28 22:57吕红光裴天琪尹勇白宇明
上海海事大学学报 2020年4期
吕红光 裴天琪 尹勇 白宇明
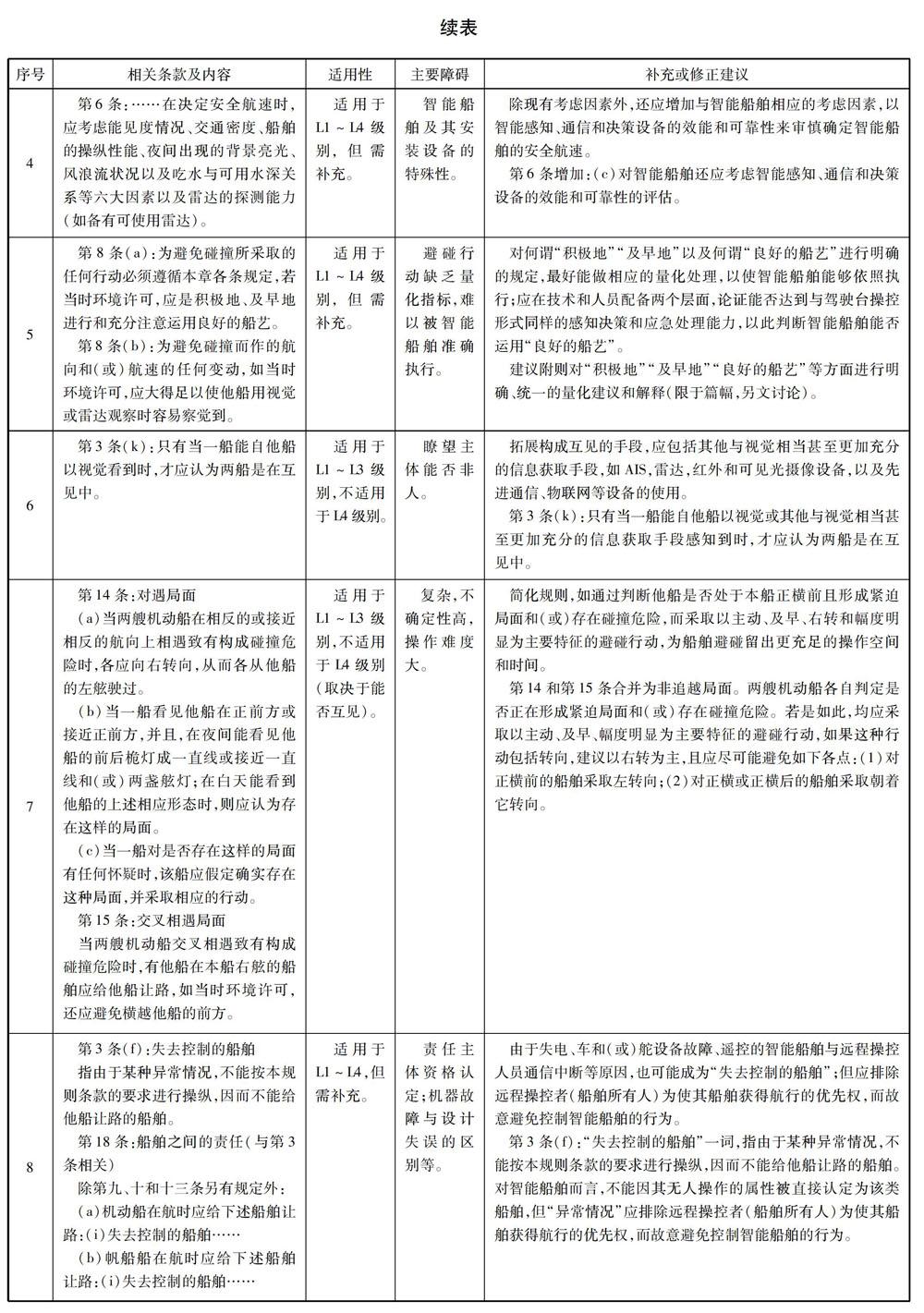
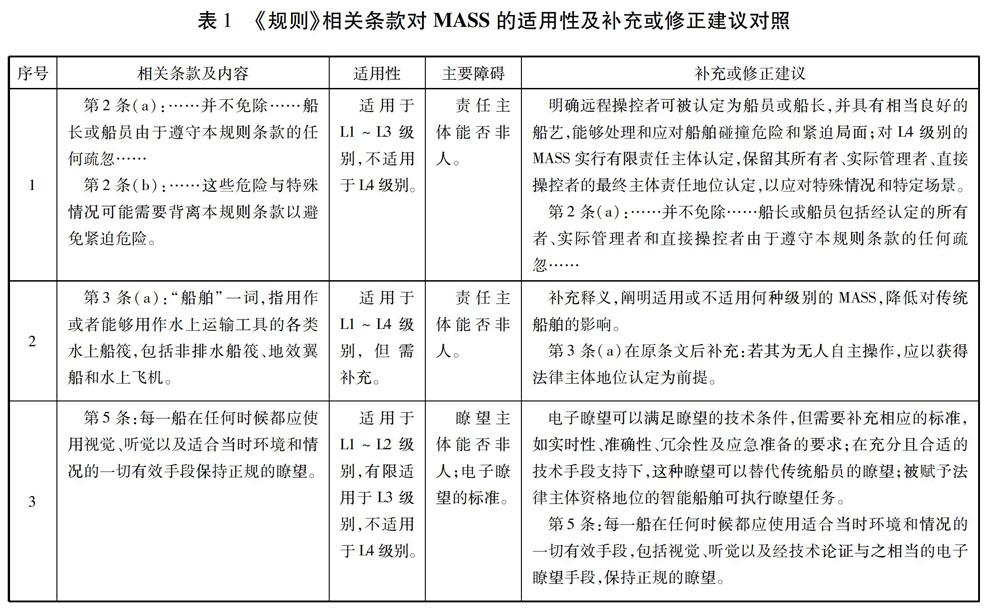
摘要:鉴于智能船舶的快速发展使得对《1972年国际海上避碰规则》的修正尤为迫切,根据智能船舶的含义和自主分级,从船舶避碰实践视角分析智能船舶与规则之间一些不可避免的冲突,如在智能船舶的适用性、任何能见度下和互见中的行动规则等方面存在的冲突。提出在船舶不同自主级别下对公约修正的认识和建议,以期促进船舶航行安全,为国际海事组织及相关立法机构梳理和修正法规提供参考。
关键词: 智能船舶; 海上水面自主船; 国际海上避碰规则; 公约修正
Abstract: In view of the fact that the rapid development of intelligent ships makes the amendments to the International Regulations for Preventing Collisions at Sea, 1972 especially urgent, according to the definition and autonomy classification of intelligent ships, some inevitable conflicts between intelligent ships and the regulations are analyzed from the perspective of ship collision avoidance practice. These conflicts exist in such aspects as the applicability of intelligent ships, the rules of action in any condition of visibility and in sight of one another. Some understandings and suggestions on the convention amendments for the different autonomy levels of ships are proposed. The aim is to promote the safety of ship navigation, and provide reference for the International Maritime Organization and relevant legislative bodies to sort out and amend the regulations.
Key words: intelligent ship; maritime autonomous surface ship; international regulations for preventing collisions at sea; convention amendment
0 引 言
随着信息化、物联网、人工智能等高新技术的发展,智能船舶的研究愈加深入。2017年6月,在国际海事组织(IMO)海事安全委员会(MSC)第98届会议(MSC98)上设立关于海上水面自主船(MASS)的新工作计划。之后MSC各届会议专门有针对MASS的议程,并在2019年6月MSC101上发布《MASS试航临时指南》。MASS已成为国际海事领域研究的热点,在国内则多以智能船舶或无人船的名称出现。
2018年12月27日,工业和信息化部、交通运输部、国防科工局联合印发《智能船舶发展行动计划(2019—2021年)》,其中重点任务的第一条就强调“开展智能船舶相关法律法规梳理,提出需求框架”。现行《1972年国际海上避碰规则》(以下简称《规则》)是智能船舶绕不开的国际规则。鉴于智能船舶与传统船舶在法律主体地位和技术层面存在较大差异,开展《规则》对其的适用性研究非常重要。文献[1]从智能船舶、安全文化、强制审核机制等方面提出了修正《规则》的迫切性和相关宏观建议。文献[2-3]则主要对《规则》本身在立法和行动规则等方面存在的问题进行研究,并指出:先进的助航手段及其发展,不仅使得基于人的“互见”失去现实意义,也使得《规则》难以适用于无人船,而能见度不良时的行动规则却可以适用。李璞[4]也针对行动规则分析了《规则》的可适性和不适性。王国华等[5]主要从法律层面研究了无人船避碰责任问题,认为无人船适用《规则》存有障碍,建议在《规则》所规定的责任等级下赋予无人船灵活的法律地位,并赋予岸基操控人员船长的法律地位。
外文文献方面:2017年丹麦海事局[6]较全面地分析了自主船适用现行国际公约(包括《规则》)所存在的障碍,并提出修正建议。PRITCHETT[7]通过对多个法规的分析说明,虽然当前无人船遵守《规则》存在困難,但为了航行安全无人船必须有规则可遵守。CAREY[8]提出《规则》应与技术保持同步,如在其中添加专门适用于无人船的附件,或视无人船为操纵能力受到限制的船舶,抑或制定一套适用于无人船的瞭望条款等。VOJKOVIC'等[9]指出在无人船无船员或船长的情况下《规则》中要求的不免除责任的船员尤其是船长该如何认定的问题。VEAL等[10]主要关注无人船的法律地位和无人船操作,分析了《规则》中避碰责任和瞭望条款的适用性,并提到了船舶大小、船舶自主级别甚至工作场景的影响。CHANG等[11]主要研究无人船的法律地位,指出《规则》中瞭望条款和行动规则在适用于无人船方面存在的障碍,认为远程遥控的无人船可能更好适用《规则》。ZHOU等[12]在调研航海科研人员和船舶驾驶员的基础上,从智能船舶航海实践的角度建议进一步解释和修正《规则》,以消除其中的不确定性;建议允许单独依靠“计算机视觉”构成互见,并保持能见度不良和互见中航行船舶的区别。
综上,目前文献在研究《规则》修正必要性的基础上,更多关注无人船的法律地位以及一些与人有关的条款(如瞭望、互见及相关行动规则等),基于法律的视角较为突出。然而,《规则》作为指导船舶海上避碰操纵的规范,是以保障船舶航行安全为宗旨的[3],具有技术和法律双重属性[5]。因此,本文从航海避碰实践、新技术的应用以及法规层面较全面梳理适用于智能船舶的《规则》修正,并提出相关建议。鉴于IMO计划于2020年完成《规则》修正的梳理工作,因此该项研究尤为迫切。
1 智能船舶概述
1.1 智能船舶概念
中国船级社(CCS)《智能船舶规范》指出,智能船舶是通过传感器、通信、互联网等技术手段,自动感知并获取船舶周围环境的信息和数据,并基于计算机科学、自动控制和大数据分析和处理等技术实现智能航行的船舶。这里的“智能”可以理解为会思考,能够全面考虑自身所处环境,并且制定出一系列的最优决策[13]。IMO以MASS立法范围界定为目的,在MSC99会议上提出MASS是在不同程度上能够独立于人类参与而运行的船舶。笔者认为“智能船舶”是一个泛化或通俗的概念,与MASS、无人船是相通的。MASS强调的是自主航行能力,其实船舶只有先具备智能,实现自主,最后才能成为真正意义上的无人船。
1.2 智能船舶的自主程度分级
智能船舶是未来船舶发展的趋势,IMO、船级社和一些公司在这方面看法较为一致,但是他们对MASS的自主程度、发展分级等方面的看法不尽相同,如劳氏船级社将智能船舶分为AL1~AL6共6个等级,法国船级社将智能船舶分为Level 0~Level 4共4个等级,罗尔斯·罗伊斯公司将智能船舶分为遥控有人船、近海遥控无人船、远洋遥控无人船、远洋自主无人船4类。IMO在MSC99会议上,就自主化水平初步将MASS分为4个级别,本文中以L1~L4代替,见表1。其中,L2和L3级别的MASS均属于远程控制的智能船舶,需在岸基中心的支持下完成船舶的自主航行。L4级别的MASS是全自主化的无人驾驶船舶,此为智能船舶发展的终极目标。
目前,L1级别的MASS已经实现,L2~L4级别的MASS仍处于研制阶段,其中L2级别的MASS已有一些实船测试案例。
2 智能船舶适用性问题
智能船舶符合相关国际公约、国内法对船舶的定义[4]。《规则》中“船舶”是指“用作或者能够用作水上运输工具的各类水上船筏,包括非排水船筏、地效翼船和水上飞机”[14]。可见,《规则》的适用对象不能排除智能船舶,但也未明确“智能船舶”的适用性。这与《规则》制定的时代以及当时船舶的技术条件有关。随着技术的发展,智能船舶出现,智能船舶之间及其与普通船舶之间的避碰问题成为对《规则》修正的一大挑战。建议在《规则》中通过具体条款对智能船舶作出解释,并进一步明确哪些条款适用于何种级别的智能船舶,哪些条款适用于传统船舶,哪些条款适用于所有船舶;更新《规则》时还应考虑对传统船舶的影响最小。这样可以避免对现有船员的大规模重新适任培训,因为智能船舶也应采取人类能够理解的避碰行动[15]。关于《规则》条文对智能船舶的适用性及相应补充修正建议,以下全部整理至附录中。
2.1 远程控制且具有决策支持功能的船舶
目前一些具有决策支持功能的船舶属于L1级别的MASS,它们可以适用《规则》。
L2级别的MASS可能存在远程操控人员和在船操控船员两种类型的操控人员,他们各自的职责权限决定了避碰行动的主体责任。就现行《规则》而言,虽然未对船员所在的位置作明确规定,但鉴于《规则》制定时的技术条件,一般只适用于在船船员进行避碰决策和采取避碰行动,因此有必要在《规则》中明确远程操控者的法律地位。
L3级别的MASS与传统船舶在主体责任方面的区别则完全在于操控者的变化,具体体现在远程操控人员的法律地位和《规则》执行地点的不同。远程操控人员不在船上,其操控行为可能发生在某一国的陆地,而被其操控的船舶则可能处于其他国家的海域或港口。因此,建议远程操控人员的法律地位和责任主从其所操控船舶,次从其所处场所,因为《规则》的主体为船舶。同时,建议远程操控人员的法律地位同船长(或船员)且要求其具有与船长(或船员)相当的良好船艺,能够正确处理和应对船舶碰撞危险和紧迫局面[5,8]。另外,在《规则》第2条(a)中提到“本规则条款并不免除任何船舶或其所有人、船长或船员由于遵守本规则条款的任何疏忽,或者按海员通常做法或当时特殊情况所要求的任何戒备上的疏忽而产生的各种后果的责任”,明确了不可免除责任的主体。而基于上述分析,建议将这一条款中的责任落實到智能船舶的具体操控者身上,而不是局限于传统意义的船长和船员。
2.2 无人自主船舶
L4级别的MASS即无人自主船舶的适用性主要体现在“智能机器”能否获得法律主体地位及其应负的相应责任问题。最大问题是无人化不能满足船舶最低安全配员要求,不存在目前法律可以承认的责任主体,比如船长[9]。另外,即使采用目前所知最先进的智能控制算法,也不能达到《规则》第2条(b)所要求的在危险和特殊情况下背离规则的要求,因为这是一个高度复杂的认知过程[10]。如此看来,无人自主船舶不适用《规则》第2条(b)的责任条款。但是,根据国际海事委员会(CMI)2018年的调研,其包括中国在内的成员国中绝大多数国家认可一艘自主控制、无船长和船员、无人员监管的500总吨货运装置属于船舶[16-17],因为这些国家的国内法也未将满足最低配员的要求作为构成船舶的必备条件。因此,《规则》对无人自主船舶的适用性问题关键在于责任主体而非对船舶形式的认定。同时还应注意,对于L4级别的MASS,即使其能够被认定为责任主体,也应该是不完全的、局部的或分场景的责任主体,在受限水域、港口水域、紧急情况下还应保留其所有者、实际管理者、直接操控者的最终主体责任地位认定。因为无人船受控于人,服务于人,也应归属于人,明确某些决策只能由人去实施也是伦理方面的需求。
3 智能船舶在任何能见度下的行动规则问题
3.1 瞭望
保持正规瞭望是船舶安全航行的前提条件,《规则》第5条要求“每一船在任何时候都应使用视觉、听觉以及适合当时环境和情况的一切有效手段保持正规的瞭望”[14]。对该条款的理解如下:(1)暗含瞭望主体,如“听觉”和“视觉”本身拥有人的自然属性;(2)泛化瞭望形式,指一切有效手段;(3)未限制瞭望地点[5],即并非一定是在船舶上。因此,在新技术条件下,瞭望条款能在一定程度上进行扩展。对传统船舶而言,除了“听觉”和“视觉”,船员主要靠望远镜、雷达、电子海图等助航工具辅助瞭望,以便对局面和碰撞危险作出判断。如果智能船舶拥有先进的助航仪器,使用电子瞭望可以达到更好的瞭望效果,那么将其作为有效的瞭望手段未尝不可[4,11],瞭望的目的是为了收集船舶周围的信息,并据此进行评估和决策。电子瞭望不牵涉疲劳、注意力分散等问题。很多实践已经证明,通过布置各级电子传感设备,不仅可以感知到远距离物标,还能够探测到近距离的风险,对他船的航向变化也可精确觉察[7]。可见,电子瞭望可以满足瞭望的技术条件,但需要补充相应的标准,如实时性、准确性、冗余性及应急准备的要求[6]。因此,智能船舶是否适用瞭望条款的问题不在技术层面,而在于瞭望的职责能否全部或部分转移到智能设备以及远程操控者身上,建议这种主体资格在《规则》修正中予以明确。
笔者认为:L1和L2级别的MASS因为船上有操控人员,可满足现有《规则》瞭望的要求;L3级别的MASS可以依靠智能设备搜集、分析和处理信息,并由远程操控人员完成瞭望,这种瞭望的主体依然是人,在充分且合适的技术手段支持下这种瞭望可以替代传统船员的瞭望,但需要确保远程操控人员切实具备正规瞭望的能力且能够持续履行瞭望职责;当智能船舶发展到L4自主级别时,人工智能将替代传统船员和远程操控者进行瞭望,此时,在满足电子瞭望技术手段基础上,还应在《规则》中明确能否赋予智能船舶执行瞭望任务的法律主体资格(这是人工智能技术应用于智能船舶不可回避的问题,如果智能船舶不具备瞭望的主体资格,那么避碰行动无法自主完成)。
3.2 安全航速
《规则》第6条要求“每一船在任何时候都应以安全航速行驶,以便能采取适当而有效的避碰行动”[14]。智能船舶在航行过程中也必须保持安全航速,但是在决定安全航速时需要考虑的因素与传统船舶会有较大的不同。传统船舶决定安全航速时应考虑能见度情况、交通密度、船舶的操纵性能、夜间出现的背景亮光、风浪流状况以及吃水与可用水深关系等六大因素以及雷达的探测能力,而智能船舶除此之外还要依赖智能感知、通信和决策设备的有效运行以及岸基人员的远程操控。此条款没有考虑到智能船舶及其安装设备的特殊性。建议在《规则》修正中智能船舶的安全航速确定应考虑智能感知、通信和决策设备的效能和可靠性。
3.3 良好的船艺
《规则》第8条第1款要求:“为避免碰撞所采取的任何行动必须遵循本章各条规定,若当时环境许可,应是积极地、及早地进行和充分注意运用良好的船艺。”该条第2款又提到避免碰撞的行动“应大得足以使他船用视觉或雷达观察时容易察觉到”[14]。这些条款中提到的“积极地”“及早地”“应大得足以使他船用视觉或雷达观察时容易察觉到”,在传统船舶的实际应用中都得依赖船员良好的船艺。笔者认为在智能船舶逐渐趋于无人时,此条款应该对这些模糊要求作出明确规定,最好能做相应的量化处理,以使智能船舶能够依照执行[18]。由于远程操控人员与船员在空间位置和配员数量方面存在差异,良好的船艺标准需要进行相应的更新[5],比如在技术和人员配备两个层面,论证能否达到与驾驶台操控形式同样的感知决策和应急处理能力,以此判断是否运用良好的船艺。同时,对无人的智能船舶而言,应通过大数据、人工智能等技术将良好的船艺所代表的完备信息植入无人船舶的航行系统内,使其不仅满足《规则》要求,而且具备与有人船舶同样的对于良好船艺的理解,能够处理海上复杂的会遇局面。
4 智能船舶在互见中的行动规则问题
4.1 互见
互见是《规则》中确定船舶间会遇局面和避碰责任的前提条件,其释义关系重大。《规则》第3条(k)将互见定义为“只有当一船能自他船以视觉看到时,才应认为两船是在互见中”。由此可知互见是基于人类视觉看见他船,而非依靠助航仪器如雷达、自动识别系统(AIS)等发现他船,因此无法适用于L4级别的MASS。另外,能否依靠视觉看到,与人眼和船舶号灯的可见距离有关。文献[19]进一步解释:互见是指某船能够从其他船看到,而不是某船已经被其他船实际看到,且“一船能自他船以视觉看到”要求其他船只应在此船的号灯可见距离之内。这就造成至少两个问题:
(1)L4级别的MASS无法与他船形成互见,继而无法适用《规则》关于船舶在互见中的行动规则。因为只有在互见中两船才有“直航船”与“让路船”之分,如果无法互见,那么智能船舶没有所谓的“让路船”责任。这显然不合理,也不利于航行安全。
(2)即使能够形成互见,由于《规则》中涉及白天与夜间的区别、大船与小船的区别、船舶种类的区别等,互见的适用时机也具有不确定性。这将影响船舶所处局面和避让决策的判断,进而影响避碰行动的有效性,也會增加智能船舶的风险。
针对第一个问题,L4级别的MASS可利用传感器、通信、物联网、互联网等技术手段,自动感知和获得船舶自身、海洋环境等方面的信息和数据,并进行大数据处理和分析[20],其探测能力将得到极大提高,能在更远的距离上获得比视觉瞭望更详细、更准确的他船信息,以协助或直接完成互见的判断。因此,建议将构成互见的手段进行拓展,除传统手段外还包括其他与视觉相当甚至更加充分的信息获取手段[4]。诸如AIS、雷达、红外及可见光摄像设备的使用,甚至先进的通信、物联网等手段,使得智能船舶不仅可以判断船舶的种类,还可使互见的时机更加明确,不受号灯能见距离等的影响,更有利于航行安全。如此,《规则》中的互见才可适用于智能船舶。
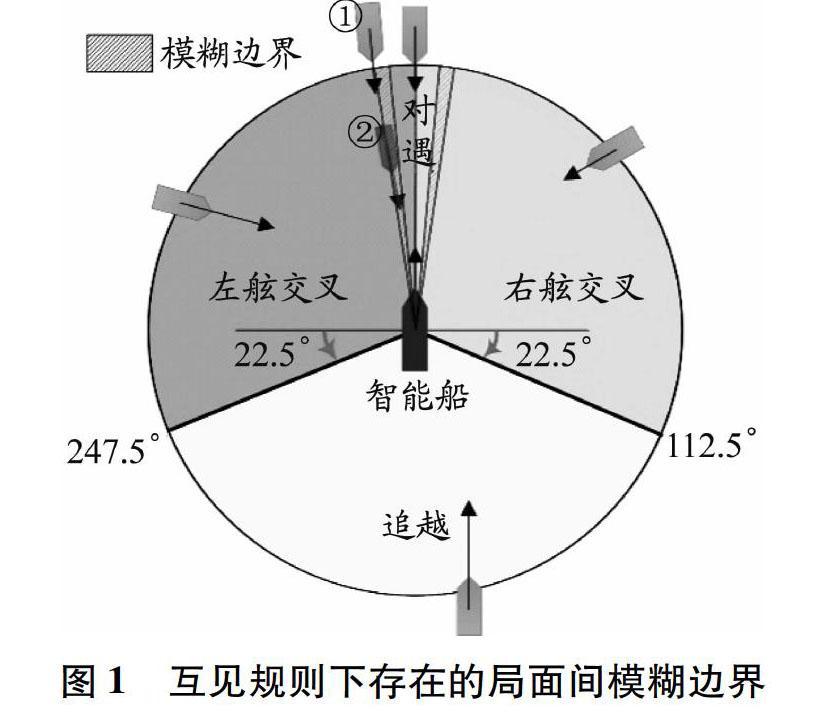
针对第二个问题,在适用互见条款之后,原条款主要用来区分两船之间的避让责任,对避碰行动本身缺乏明确的指导,且需区分船舶种类、大小及所处的各种局面,不确定性高,操作难度大[3]。而智能船舶投入使用需要确定性的决策并具有可解释性。互见中有些局面存在避碰义务不清晰的问题[21],比如,在对遇局面的形成条件中“航向相反或接近相反”是一个比较模糊的概念。另外,考虑到舷灯光弧判断条件,以及受风浪、操舵不稳等的影响,很多文献或自主避碰系统对该局面理解为两船船首向夹角5°~6°或半个罗经点[18,22-23]。因此,避碰实践中会出现如图1所示的模糊界限。智能船舶在认定同一态势下的他船时,可能出现“对遇”或“小角度交叉相遇”两种不同的结果,而这又会影响其采取避碰行动。《规则》虽规定“当对是否构成对遇局面有任何怀疑时应假定存在对遇局面”,但“怀疑”属于不确定的判断。如图1中智能船与他船①实际形成小角度左舷交叉相遇,但因“不确定”而采取对遇规则下的行动,则可能会导致直航船过早地独自采取行动,这也将违背《规则》[24]。另外,当出现如图1的智能船与他船②之间距离较近的局面时,即使他船的位移很小,也可导致其舷角发生较大变化,从而改变其所处的局面。这样,智能船舶可能会遭遇两个相矛盾的决策突然切换的问题。比如,原来的交叉相遇局面突然变为对遇局面,智能船舶决策需由直航变为右转避让。而受船舶惯性、操纵性影响,智能船舶难以及时操作完成或直接造成决策的不确定性,导致发生危险[25]。针对智能船舶,建议《规则》修订中降低互见中避让的复杂度,用简单的规则,如通过判断他船是否处于本船正横前且形成紧迫局面或存在碰撞危险,而采取以主动、及早、右转、幅度明显为主要特征的避碰行动,为船舶避碰留出更充足的操作空间和时间,而不是浪费更多的时间和空间来判断其处于什么局面。
4.2 失去控制的船舶
《規则》定义“失去控制的船舶”为因某种异常情况,不能按本规则条款的要求进行操纵,因而不能给他船让路的船舶[14]。这里的异常情况一般指超出船舶正常操作模式的情况,如主机、舵机故障或损坏等。不能将智能船舶的无人驾驶属性列入异常情况[8],因而,智能船舶不能被认定为失去控制的船舶,这一点得到了英国、法国、日本、新加坡等国家的认可[17,26]。
然而,智能船舶由于失电、车和(或)舵设备故障、遥控的智能船舶与远程操控人员通信中断等原因,也可能成为“失去控制的船舶”,此时应具有《规则》所规定的航行优先权。值得注意的是,认定智能船舶为“失去控制的船舶”时,还应排除远程操控者(船舶所有人)为使其船舶获得航行的优先权,而故意避免控制智能船舶的行为。
由于L4级别的MASS的感知、决策和控制系统由一系列算法构成,机器在某些情况下可能发生故障,所以L4级别的MASS存在一定概率作出一些人类无法理解的决策(如不按《规则》进行操纵,不给他船让路等)。这种情况下智能船舶能否被认定为“失去控制的船舶”有待商榷,因为这涉及智能船舶的法律主体资格认定、机器故障与设计失误的区别等问题。如果被认定是机器故障的原因,则智能船舶属于目前《规则》中“失去控制的船舶”,否则对“失去控制的船舶”的定义需添加更多的限制条件。
5 结束语
智能船舶的自主级别不同,对《规则》的适用性不同。由于存在船舶主体责任问题,在真正的无人自主船到来之前,《规则》仍然具有较强的适用性。相冲突之处主要表现在瞭望、安全航速、良好的船艺、互见、失去控制的船舶认定等方面。保守而言,瞭望条款可以扩展,建议《规则》不限定瞭望主体,而以瞭望的量化效果标准确定船舶是否保持了正规瞭望。安全航速的确定还应考虑智能感知、通信和决策设备的效能和可靠性。良好的船艺应从技术和人员两个层面做相应量化。在行动规则方面,建议考虑感知、通信等技术的进步,拓展构成互见的手段,并将互见中的行动规则尽可能简单化,降低不确定性;智能船舶不能因其无人驾驶属性而被列入失控船,但其有成为失控船的可能。与其他已有文献相比,本文以智能船舶为切入点,从船舶避碰实践视角对《规则》进行了更全面的梳理,有针对性地指出了智能船舶与《规则》不可避免的冲突。限于论文篇幅和作者水平,一些关键条款的论述和建议仍需在以后的研究中进一步深入和完善。可以预见,未来智能船舶的发展对《规则》的冲击将远超本文论及范围,因为其本质是对船舶安全航行及航运可持续发展的需求。另外,《规则》修正还应具有前瞻性和导向性,以《规则》的更新引导不断发展的智能船舶技术,将更有利于技术本身的完善和安全目标的达成。最后,《规则》的修正是牵一发而动全身的系统工程,在IMO的“强制审核机制”和“安全文化”[2]的推动下,这项工程的重要性和战略地位更加突出。在积极研发智能船舶的同时,将这项工作推动得越积极、越扎实、越全面,对航运业的安全和健康发展越有利。
参考文献:
[1]张铎, 张仁平. 引领国际海上避碰规则全面审议[J]. 世界海运, 2017, 40(2): 1-5.DOI: 10.16176/j.cnki.21-1284.2017.02.001.
[2]张铎. 修正国际海上避碰规则的急迫需要[J]. 世界海运, 2016, 39(5): 15-18. DOI: 10.16176/j.cnki.21-1284.2016.05.003.
[3]张铎. 避碰规则的宗旨、立法模式及其行动规则的选择[J]. 世界海运, 2019, 42(6): 12-15.DOI: 10.16176/j.cnki.21-1284.2019.06.002.
[4]李璞. 无人智能船航行安全法律问题研究: 以船舶避碰为视角[D]. 大连: 大连海事大学, 2018.
[5]王国华, 孙誉清. 无人船碰撞相关的责任[J]. 上海海事大学学报, 2019, 40(2): 120-126.DOI: 10.13340/j.jsmu.2019.02.021.
[6]Danish Maritime Authority. Analysis of regulatory barriers to the use of autonomous ships final report[R/OL].(2017-12-01)[2020-02-20].https://www.dma.dk/Documents/Publikationer/Analysis%20of%20Regulatory%20Barriers%20to%20the%20Use%20of%20Autonomous%20Ships.pdf.
[7]PRITCHETT P W. Ghost ships: why the law should embrace unmanned vessel technology[J/OL]. [2020-02-20].Tulane Maritime Law Journal, 2015, 40(1): 197-226. https://heinonline.org/HOL/P?h=hein.journals/tulmar40&i=205.
[8]CAREY L. All hands off deck? The legal barriers to autonomous ships[EB/OL].(2017-08-24)[2020-02-10]. https://ssrn.com/abstract=3025882.
[9]VOJKOVIC' G, MILENKOVIC' M. Autonomous ships and legal authorities of the ship master[J]. Case Studies on Transport Policy, 2020, 8(2), 333-340. DOI: 10.1016/j.cstp.2019.12.001.
[10]VEAL R, TSIMPLIS M, SERDY A. The legal status and operation of unmanned maritime vehicles[J]. Ocean Development & International Law, 2019, 50(1): 23-48. DOI: 10.1080/00908320.2018.1502500.
[11]CHANG Yen-Chiang, ZHANG Chao, WANG Nannan. The international legal status of the unmanned maritime vehicles[J]. Marine Policy, 2020, 113: 103830. DOI: 10.1016/j.marpol.2020.103830.
[12]ZHOU Xiangyu, HUANG Jinjing, WANG Fengwu, et al. A study of the application barriers to the use of autonomous ships posed by the good seamanship requirement of COLREGs[J]. The Journal of Navigation, 2019, 73: 1-16.DOI: 10.1017/S0373463319000924.
[13]严新平. 智能船舶的研究现状与发展趋势[J]. 交通与港航, 2016, 3(1): 23-26. DOI: 10.16487/j.cnki.issn2095-7491.2016.01.007.
[14]IMO. Convention on the international regulations for preventing collisions at sea (COLREGs), 1972 [EB/OL].[2020-02-20].http://www.imo.org/en/OurWork/Safety/Navigation/Pages/Preventing-Collisions.aspx.
[15]SZLAPCZYN′SKI R, GHAEMI H. Framework of an evolutionary multi-objective optimisation method for planning a safe trajectory for a marine autonomous surface ship[J]. Polish Maritime Research, 2019, 26: 69-79.DOI: 10.2478/pomr-2019-0068.
[16]郑世江. 论无人运输船的法律地位与公约适用[J]. 法制与社会, 2019(5): 206-208.DOI: 10.19387/j.cnki.1009-0592.2019.02.217.
[17]CMI. Maritime law for MASS[EB/OL].(2017-03-24)[2020-02-20].https://comitemaritime.org/work/mass/.
[18]VERGRD K I, TANNUM M S, HAAVARDTUN P, et al. Chase, no straighter: COLREG compliant anti-collision manoeuvres for crossing situations[C]//VERGRD K I. Robotic Sailing 2017. Springer, 2018: 81-91.DOI: 10.1007/978-3-319-72739-4_7.
[19]赵月林. 再论交叉相遇局面适用时机和保向保速的含义: 从“桑吉”轮与“长峰水晶”轮碰撞事故安全调查报告谈起[J]. 世界海运, 2018, 41(9): 1-7.DOI: 10.16176/j.cnki.21-1284.2018.09.001.
[20]贺辞. CCS《智能船舶规范》六大功能模块要求[J]. 中国船检, 2016(3): 84-85.DOI: 10.3969/j.issn.1009-2005.2016.03.018.
[21]PERERA LP. Deep learning towards autonomous ship navigation and possible COLREGs failures[J]. Journal of Offshore Mechanics and Arctic Engineering, 2020, 142: 031102.DOI: 10.1115/1.4045372.
[22]LYU Hongguang, YIN Yong. COLREGs-constrained real-time path planning for autonomous ships using modified artificial potential fields[J]. The Journal of Navigation, 2019, 72: 588-608. DOI: 10.1017/S0373463318000796.
[23]HE Yixiong, JIN Yi, HUANG Liwen, et al. Quantitative analysis of COLREG rules and seamanship for autonomous collision avoidance at open sea[J]. Ocean Engineering, 2017, 140: 281-291.DOI: 10.1016/j.oceaneng.2017.05.029.
[24]郑中义, 吴兆麟. 船舶对遇避碰决策的研究[J]. 大连海事大学学报, 1998, 24(3): 29-32.DOI: 10.16411/j.cnki.issn1006-7736.1998.03.008.
[25]PERERA L P, CARVALHO J P, SOARESC G. Solutions to the failures and limitations of mamdani fuzzy inference in ship navigation[J]. IEEE Transactions on Vehicular Technology, 2014, 63(4): 1539-1554.DOI: 10.1109/TVT.2013.2288306.
[26]王一斐. 無人船法律问题研究[D]. 北京: 中国政法大学, 2018.
(编辑 贾裙平)
