
基于隐马尔科夫模型的VLCC目的港预测
2020-04-28 22:04杨春王一丹徐晖胡勤友潘亚兰
上海海事大学学报 2020年4期
关键词:智能交通
杨春 王一丹 徐晖 胡勤友 潘亚兰
摘要:超大型油船(very large crude carrier,VLCC)目的港预测对海运原油流向预测以及货源地未来运力估计具有重要作用。针对VLCC的AIS目的港信息存在缺失、更新不及时、不准确等现象,提出一种基于隐马尔科夫模型的VLCC目的港预测方法。分析船舶AIS轨迹数据,得到油船历史停靠港口序列;根据VLCC轨迹提取习惯航路,以航路中的交叉点为依据设置观测线;利用船舶航行轨迹数据判断船舶是否经过观测线以及经过观测线的方向,对不同方向分别计算船舶在挂靠港间的转移概率矩阵和船舶挂靠港与观测线间的输出概率矩阵,建立VLCC目的港预测模型并进行预测。研究结果表明:在大多数情况下VLCC目的港预测的准确率可以达到70%以上;航线越固定、运行越规律的船舶,预测准确率越高;船舶越靠近目的港,预测越准确;重载状态下的船舶目的港预测更准确。
关键词: 智能交通; AIS轨迹数据; 超大型油船(VLCC); 目的港预测; 隐马尔科夫模型
Abstract: Destination port prediction of very large crude carriers (VLCCs) plays an important role in forecasting the flow of maritime crude oil and estimating the future capacity of the source. Aiming at the fact that VLCC destination port information from AIS is missing, untimely and inaccurate, a prediction method for VLCC destination ports is proposed based on the hidden Markov model. The AIS trajectory data are analyzed to obtain the historical calling port sequence. The customary route is extracted based on the VLCC trajectory, and the route observation line is set based on the route intersections. The ship trajectory data are used to determine whether the ship passes through the observation line and the direction through the observation line, the transition probability matrix of the ship between the calling ports and the output probability matrix between the ship calling port and the observation line in different directions are calculated, and a prediction model for VLCC destination ports is built to carry out the prediction. The research results show that: in most cases, the accuracy of the VLCC destination port prediction can reach more than 70%; the more fixed the ship route and the more regular the ship operation, the higher the prediction accuracy; the closer the ship is to the destination port, the more accurate the prediction is; the ship destination port prediction under heavy load is more accurate.
Key words: smart transportation; AIS trajectory data; very large crude carrier (VLCC); destination port prediction; hidden Markov model
0 引 言
據克拉克森统计,目前全球原油油船总计2 142艘,超大型油船(very large crude carrier,VLCC)总计818艘,占比达38.2%。中国是原油贸易大国,2019年经海上运输的原油进口量超4.1亿t,其中VLCC的运输量占比82%以上。VLCC作为原油的主要运载工具,有较规律的挂靠港和航线,其船舶自动识别系统(automatic identification system, AIS)轨迹数据详细记录了船舶的动态和航次信息。
利用AIS数据进行海运原油流量和流向的统计和预测、船队智慧经营的研究已经成为学术界、金融界和航运界的研究热点。当前拥有“世界第一”规模油船船队的中远海运能源运输股份有限公司正在重塑VLCC船队发展格局,为“一带一路”建设打造可靠的原油运输保障团队[1]。张春贺[2]在深入研究分析了世界石油的贸易流向后,强调全球石油(包括原油和成品油)贸易量的三分之二依赖油船进行运输,全球石油流向很大程度上决定了油船船队的流向。ARMITAGE[3]基于全球VLCC的AIS数据,统计2019年VLCC航行时间分布,并以此推断当年全球各区域的原油流向情况。杨秋平等[4]通过VLCC历史航迹数据获取其主要航线后,基于线性规划算法设计开发了一种航线配船和船队规划的决策系统,用来提高VLCC船队总营运利润。林贵锋等[5]分别从全球经济、油船运输市场以及VLCC运力供给等角度分析了国际油船运输市场的发展趋势,并对我国VLCC船队的经营发展提出建议。
准确的船舶目的港信息对上述研究具有重要的价值。一方面,只要知道了重载船舶的目的港,就可以知道其卸货港,便于对其所载原油的流向以及抵达卸货港的时间及早做出判断,从而及早帮助相关机构对原油流量和流向进行统计和预测;另一方面,航运公司對市场运力供给状况非常关注,准确及时的船舶预抵港信息将有助于航运公司对市场运力供给状况进行评估。比如,航运公司会关注未来一段时间内抵达波斯湾富查伊拉港口所有空载VLCC的数量,将其作为波斯湾区域航运市场运力供需评估的一个依据,这就需要对全球VLCC是否能够在这一时间段内赶到富查伊拉港口进行判断。此时,需要掌握重载VLCC的目的港(卸货港),用来判断其到达卸货港的时间、从该卸货港到富查伊拉港口的时间以及必要的卸货和加油时间之和是否小于特定的时间阈值。
AIS数据包含了航次信息,即船舶目的港和ETA信息。但由于人为和技术原因,目前船舶AIS目的港信息经常存在缺失、更新不及时、不规范甚至错误的情况,影响了实际应用效果。因此,有必要对船舶目的港进行预测,弥补现有AIS数据的不足,更好地支撑AIS数据的应用分析。
船舶目的港预测研究比陆地交通的要落后一些。陆地交通工具目的地的预测方法有很多并且正日趋完善。例如,NETO等[6]将马尔科夫模型与部分匹配算法结合,预测用户轨迹、下一目的地以及历史数据中未出现过的区域。XIA 等[7]结合变量阶马尔科夫模型和用户的时空规则提出了一种位置预测方法,这种方法对于轨迹较少的位置预测具有显著作用。LASSOUED等[8]将车辆GPS信息映射为道路链接序列,并以此为输入,利用隐马尔科夫模型对行驶车辆的目的地和路径进行预测。
对于海上交通而言,分析AIS数据,充分挖掘其背后的价值已成为必然趋势。WIJAYA等[9]在HBase上存储和处理AIS大数据集,开发了一种预测船舶运动行为的算法,在数据处理速度上有显著提高。FUJINO等[10]利用主题模型中的线性判别算法从大量AIS数据中提取船舶航线。KANG等[11]基于VLCC时间序列数据,采用人工神经网络(artificial neural networks, ANN)训练算法,结合Levenberg-Marquardt和Bayesian正则化算法,对VLCC市场进行了预测。REGLI等[12]结合了AIS和船舶固定装置,提出了一种根据AIS信息预测油船市场运价的模型。然而,目前尚无利用AIS数据进行船舶目的港预测的研究。因此,本文结合招商轮船VLCC智慧经营项目,尝试利用AIS数据,对全球VLCC的目的港进行预测研究。
1 基于隐马尔科夫模型的VLCC目的港预测
本文利用隐马尔科夫模型预测VLCC目的港。隐马尔科夫模型包含两个随机过程:第一个随机过程是马尔科夫链,由一个确定的状态集以及状态间的转移概率矩阵确定,在隐马尔科夫模型中,此类状态不能被直接观察到,故称其为隐状态;第二个随机过程是隐状态在转移过程中产生的可观察状态,具体产生的可观察状态依赖于与特定隐状态相关的概率分布。本文将VLCC目的港作为隐马尔科夫模型中的隐状态,在主航路上标记观测线,将船舶经过的具体观测线以及经过观测线的方向作为隐马尔科夫模型中的可观察状态。
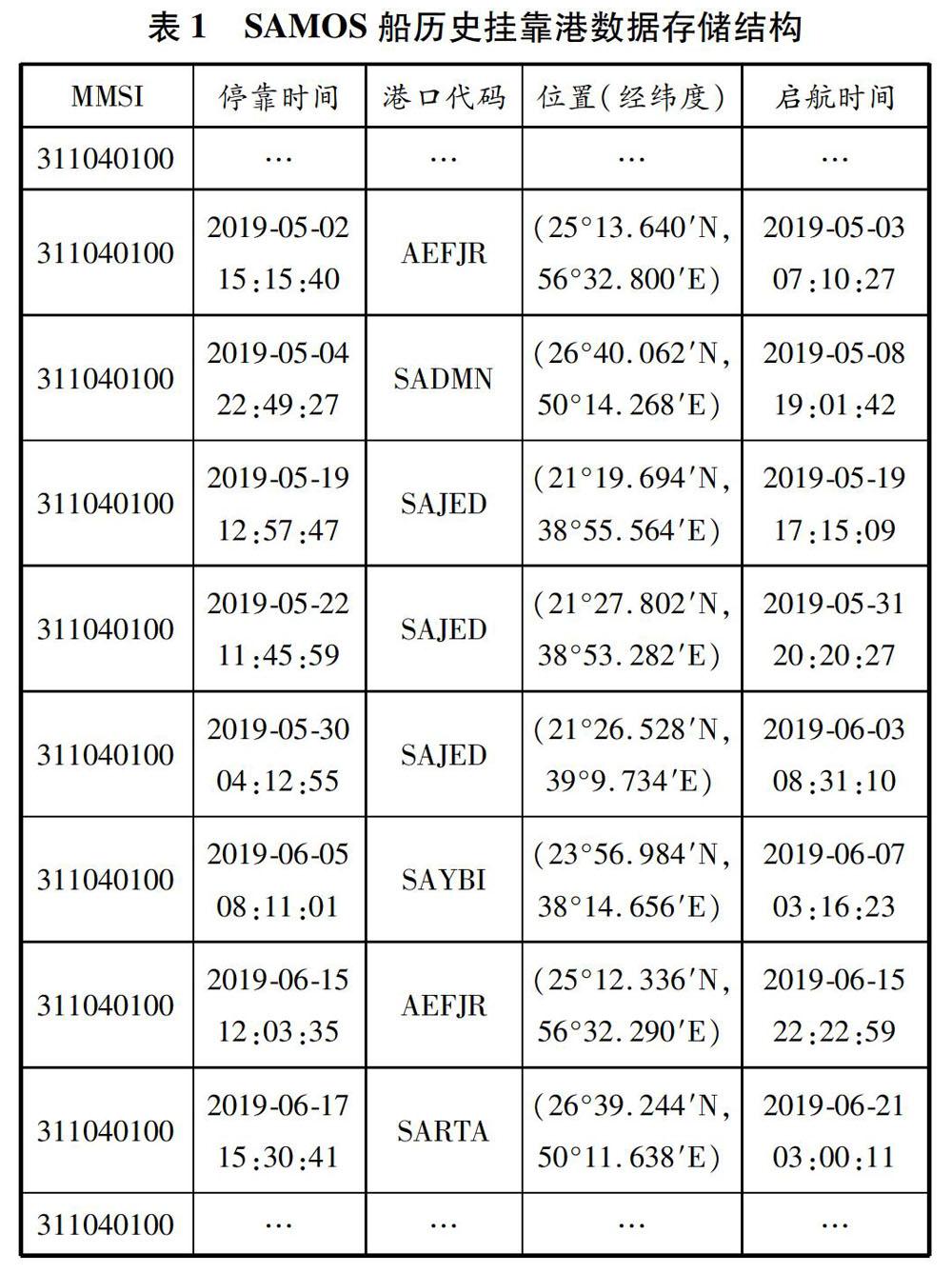
隐马尔科夫模型描述的是隐状态与由其生成的可观察状态之间的关系,可用一个五元组λ=(S,O,P,B,π)表示[13],其中:S为船舶挂靠港集合,S={s1,s2,…,sN}, sj为船舶经过的第j个挂靠港;L为船舶航行中经过的观测线集合,L={l1,l2,…,lM},lk为第k条观测线;P为隐状态转移矩阵,即船舶在挂靠港间的转移概率矩阵,P={pij},pij表示从港口si转移到港口sj的概率(见图1);B为隐状态输出可观察状态关系矩阵,即船舶挂靠港与观测线之间的输出概率矩阵,B={bjk},bjk=p(lk|sj),1≤j≤N,1≤k≤M,bjk表示目的港为港口sj时经过观测线lk的概率;π表示初始挂靠港概率分布。在本文的表述中,挂靠港指船已实际挂靠过的港口,目的港指船即将前往的港口。
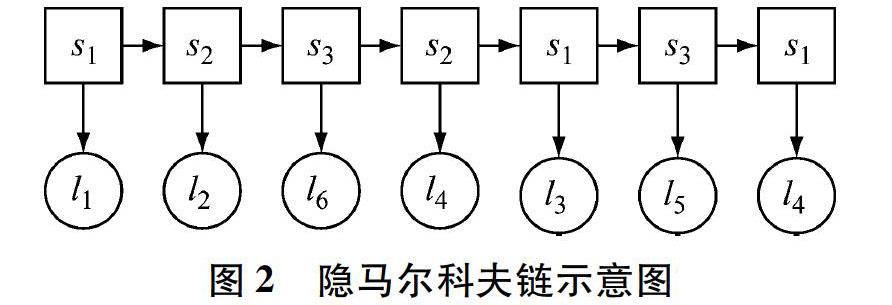
假设某船有3个挂靠港,船舶挂靠港序列为(s1,s2,s3,s2,s1,s3,s1),为隐状态序列;航路观测线序列为(l1,l2,l6,l4,l3,l5,l4),为可观察状态序列。二者对应关系见图2,其中:横向箭头代表港口之间的转移关系,即隐状态之间的转移关系;纵向箭头代表港口与观测线之间的关系,即隐状态与可观察状态之间的关系。
2 模型建立
利用隐马尔科夫模型对VLCC目的港进行预测,主要分为训练阶段和预测阶段两个部分,见图3。在训练阶段,先对AIS数据进行处理得到建模数据,然后对VLCC的历史AIS数据进行学习和挖掘,从中学习运动特征,构造预测模型。在预测阶段,基于训练阶段得到的模型,输入待查询船已有的轨迹数据,进行目的港分析和预测。
2.1 船舶AIS数据处理
2.1.1 AIS数据预处理
对AIS数据进行处理,得到实验所需的轨迹序列,步骤如下:
步骤1 将MMSI位数不为9、港口代码或名称有明显错误的数据删除,将经度不在180°W~180°E、纬度不在90°S~90°N范围内的数据删除。
步骤2 统计VLCC历史轨迹数据并提取VLCC历史挂靠港数据,数据字段包含MMSI(海上移动识别码)、portcode(港口代码)、triggertime(停靠时间)、restarttime(启航时间)、mpostion(所处位置经纬度)。
步骤3 统计VLCC习惯航路观测线数据集合,数据字段包含lineID(观测线ID)、linename(观测线名称)、linestring(观测线起始点经纬度)。
步骤4 将VLCC历史挂靠港数据进行进一步处理。比较相邻两条数据,若MMSI相同且挂靠港相同,说明有重复记录,则保留当前数据,删除下一条数据;若MMSI不同则上下两条数据均保留。
步骤5 重复步骤4处理所有船舶历史挂靠港数据。
SAMOS船(MMSI:311040100)历史挂靠港数据存储结构见表1。
2.1.2 船舶习惯航路的观测线设置
VLCC航线的規律性使得VLCC在挂靠港之间具有较固定的路线,因此可根据AIS数据绘制船舶轨迹得到习惯航路。在航路分叉点前的主航路上画一条与其成90°的线段作为观测线。若整段航路无分叉点则只设置一条观测线。以此类推,为分叉点后的航路设置观测线,如图4所示:S1,S2,…,S7表示船舶的习惯航路;l1,l2,…,l7表示习惯航路上的观测线;D1,D2,D3表示船舶在该点处有不同的前行方向或者船舶从不同的方向行驶到此处。
根据VLCC习惯航路和设置的观测线可预测船舶即将抵达的港口。在数据比较充足时,以观测线为斜边,根据线段两端点经纬度确定水域,根据船舶当前经纬度判断船舶是否位于该水域,进而判断船舶是否经过该观测线。然而,船舶在航行期间因卫星通信不稳定而容易产生数据丢失现象,无法及时获取船舶当前经纬度信息。此时,可根据连续两个时间点船舶经纬度坐标形成的线段与观测线是否跨越来判断船舶是否经过观测线。
2.1.3 船舶经过观测线的方向判断
船舶运动与车辆、飞机等的运动相比有其独特性:船舶在正常航行过程中不会突然停止、转弯或倒转,其从一种运动状态转换到另一种运动状态需要更多时间和空间[14]。因此,本文基于所设置的观测线判断VLCC经过观测线的方向,如图5所示:以观测线为基准,将观测水域分为逆时针180°和顺时针180°两个区间,以此将船舶经过观测线的方向划分为d1和d2两个方向,再通过船舶经过观测线时的恒向线航向和该观测线的方位角进行判断。
2.2 预测模型建立步骤
VLCC利用AIS数据进行目的港预测,主要分为以下步骤。
步骤1 计算隐状态转移矩阵P。VLCC挂靠港为隐状态,P的行和列均为挂靠港。先根据MMSI对船舶进行分组,然后根据其经过观测线的方向再次分组,按时间升序排列得到方向不同的两个挂靠港记录。遍历挂靠港数据,上下连续两个港口表示由始发港转移到目的港,利用式(1)得到P。
步骤2 计算隐状态输出可观察状态关系矩阵B。VLCC是否经过观测线为可观察状态,B的行为观测线,列为船舶挂靠港。根据船舶航行轨迹判断其经过观测线的方向,得到船舶经过的港口及观测线,按时间升序排列。以KMTC INCHEON船(MMSI:373220000)为例,如表2所示,若方向d1、d2对应的值为1,则该船从该方向经过对应观测线。遍历数据中的观测线和挂靠港集合,得到船舶从不同方向经过观测线lk抵达目的港sj的次数yjk和概率bjk。
步骤3 预测VLCC目的港。输入待查询船的MMSI和已有的航迹数据。若该船尚未经过观测线,则在矩阵P中根据MMSI查询该船在不同方向到达各个可能港口的概率;若该船已经过观测线,则在矩阵B中根据MMSI和该船经过观测线的方向获取该船到达各个可能港口的概率。
步骤4 统计概率。按照降序排列预测结果,展示预测的港口及其对应的概率值,将最大概率对应的港口作为目的港预测结果。
3 实验分析
3.1 实验环境和数据说明
本文的实验数据存储于Cassandra数据库,同时结合MySQL关系数据库进行数据处理,利用Spark和Java实现算法。实验所用数据是由HiFleet船队在线提供的2016-01-01 00:00:00—2018-12-31 24:00:00期间的载重27万t以上油船的历史挂靠港信息和AIS数据。
3.2 实验结果及分析
将2019-05-01 00:00:00—2019-06-30 24:00:00期间的油船历史轨迹数据作为测试集。
3.2.1 主要航线上VLCC目的港预测结果验证
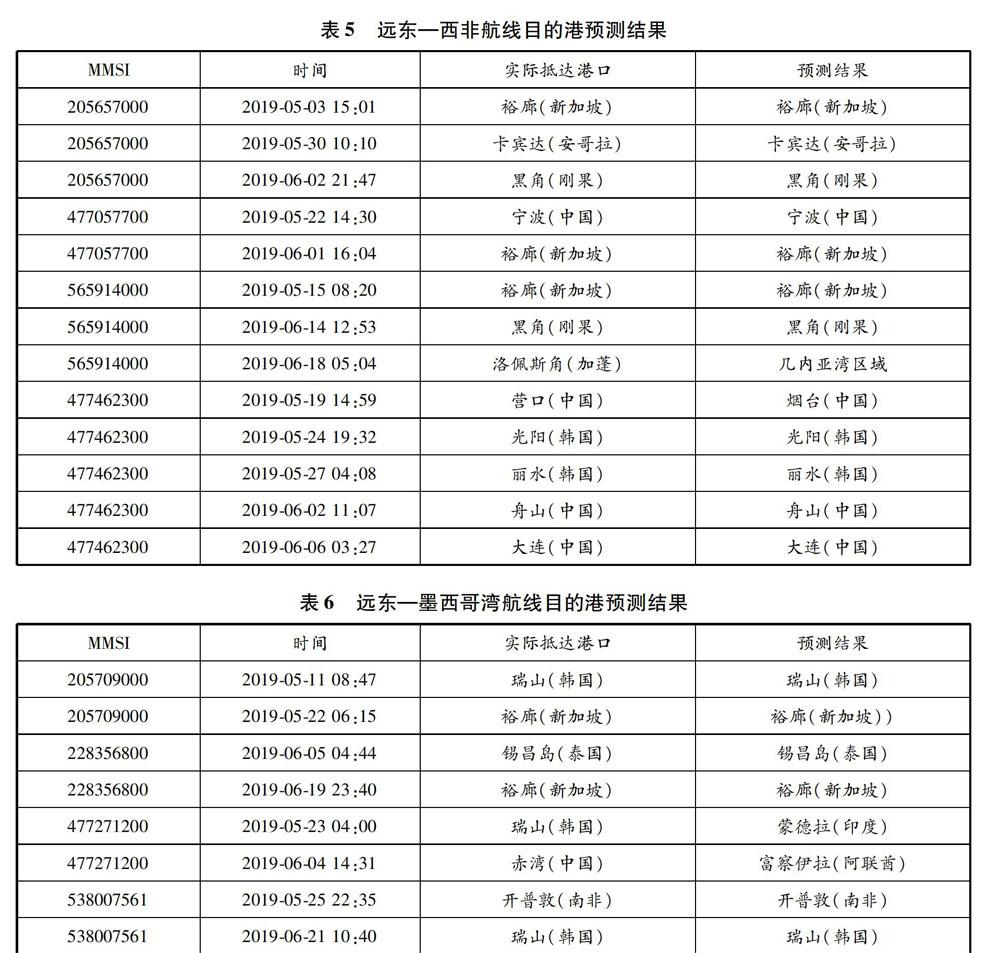
VLCC航线较固定,大部分时间在特定区域之间转移,其中主要的原油装货区域有中东波斯湾、西非的安哥拉和几内亚湾、巴西、美国墨西哥湾等,原油卸货区域有远东(包括中国、日本和韩国)、印度和泰国等区域。汇总主要航线上的VLCC AIS数据进行目的港预测结果验证。VLCC目的港预测准确率对高于波斯湾到远东、印度的VLCC目的港预测准确率,这是由于从远东到巴西、墨西哥湾的航程较长,航线相对少且较固定,而波斯湾地区作为盛产石油地区,港口众多且相互之间距离比较近,大量的VLCC往返均经过此区域,导致目的港预测准确率下降。某些航线目的港预测结果见表3~6。
可以看到,在部分船舶目的港预测上,出现了仅预测出港口所在区域,未预测出具体港口的现象,这是因为该船在航行过程中以新航线航行,经过了新的观测线。因此,下一步研究是汇总所有船舶经过的观测线数据,形成公有的隐状态输出可观察状态关系矩阵,用于预测采用新航线航行的船舶。
3.2.2 VLCC目的港预测准确率与船舶距离目的港远近关系分析
随机选取部分船舶,观察其在两个港口之间目的港预测准确率的变化趋势,见图7。由图7可知,船舶距离目的港越近,经过的观测线数量越多,模型不断修正目的港预测结果,目的港预测准确率呈上升趋势。
3.2.3 VLCC目的港预测准确率与船舶载货状态关系分析
正常情况下,VLCC往往以满载状态从原油装货区航行至原油卸货区,以空载状态从原油卸货区航行至原油装货区。以船舶在卸货港卸货结束作为起始时刻,到装货港进行装货,然后再去卸货港进行卸货作为结束时刻的这个过程称为船舶的一个装卸货航次。本文将主要航线上的船舶的装卸货航次分为“卸货-装货”航次和“装货-卸货”航次两个部分,对处于空载和满载状态的VLCC分别进行目的港预测。随机选取测试集中的100艘空载状态和100艘满载状态的船舶,对其进行目的港预测,记录预测结果,统计预测的目的港及其对应的概率,对概率集进行分位数统计,见图8。
由图8可以看到,每个分位数处的目的港预测概率均比较接近且保持较高水平,这证明了本文所提出的目的港预测模型的预测结果具有一定的参考价值。满载船舶的目的港预测概率比空载船舶的高,这一结果与VLCC的航行特性相吻合,部分原因是因为船舶在满载货物后,往往根据运输合同驶往指定的目的港,但是卸货后的空载船舶往往一开始只知道目的港区域,而不知道具体的目的港。
4 结束语
本文基于VLCC的AIS历史轨迹数据,实现了一种VLCC目的港隐马尔科夫预测算法,并以2019年部分VLCC轨迹数据为例进行了实证研究。结果表明:本文提出的VLCC目的港预测方法准确率较高,可达70%以上;航线越固定、运行越规律的船舶,对其目的港预测的准确率越高;船舶越靠近目的港,预测结果越准确;重载船舶的目的港预测结果更准确。该算法可以用于海运原油流量和流向中短期预测,还可以用于原油货源地运力估计,对原油进出口预测、VLCC船队智慧经营等具有参考价值。
参考文献:
[1]朱迈进. 打造国家能源运输安全通道构筑能源“海上丝绸之路”[N]. 中国远洋海运报, 2020-01-03(B02)[2020-03-17].
[2]张春贺. 全球石油贸易大流向[J]. 国土资源情报, 2006(10): 52-55.
[3]ARMITAGE E. Tracking the tanker fleet across the global playing field[EB/OL].(2019-11-29)[2020-03-17]. https://sin.clarksons.net/News/Article/146578#!#sincustomhome.
[4]杨秋平, 谢新连, 苏晨. 航线配船与船队规划模型及算法实现[J]. 中国航海, 2009, 32(1): 91-95.
[5]林贵锋, 谢新连, 肖跃军. 国际油船运输市场的走势分析[J]. 大连海事大学学报(社会科学版), 2005, 4(1): 38-42. DOI: 10.3969/j.issn.1671-7031.2005.01.010.
[6]NETO F D N, DE SOUZA BAPTISTA C, CAMPELO C E C. Combining Markov model and prediction by partial matching compression technique for route and destination prediction[J]. Knowledge-Based Systems, 2018, 154: 81-92. DOI: 10.1016/j.knosys.2018.05.007.
[7]XIA Ying, GONG Yu, ZHANG Xu, et al. Location prediction based on variable-order Markov model and users spatio-temporal rule[C]//2018 International Conference on Information and Communication Technology Convergence. IEEE, 2018: 37-40. DOI: 10.1109/ICTC.2018.8539593.
[8]LASSOUED Y, MONTEIL J, GU Yingqi, et al. A hidden Markov model for route and destination prediction[C]//2017 IEEE 20th International Conference on Intelligent Transportation Systems. IEEE, 2017: 1-6. DOI: 10.1109/ITSC.2017.8317888.
[9]WIJAYA W M, NAKAMURA Y. Predicting ship behavior navigating through heavily trafficked fairways by analyzing AIS data on Apache HBase[C]//2013 1st International Symposium on Computing and Networking. IEEE, 2013: 220-226. DOI: 10.1109/CANDAR.2013.39.
[10]FUJINO I, CLARAMUNT C, BOUDRAA A. Extracting route patterns of vessels from AIS data by using topic model[C]//2017 IEEE International Conference on Big Data. IEEE, 2017: 4744-4746. DOI: 10.1109/BigData.2017.8258528.
[11]KANG S, DOH D. Forecasting earning of VLCC tankers using artificial neural networks[J]. Journal of the Korean Society of Marine Engineering, 2018, 42(10): 851-858. DOI: 10.5916/jkosme.2018.42.10.851.
[12]REGLI F, NOMIKOS N K. The eye in the sky-freight rate effects of tanker supply[J]. Transportation Research Part E: Logistics and Transportation Review, 2019, 125: 402-424. DOI: 10.1016/j.tre.2019.03.015.
[13]QIAO Shaojie, SHEN Dayong, WANG Xiaoteng, et al. A self-adaptive parameter selection trajectory prediction approach via hidden Markov models[J]. IEEE Transactions on Intelligent Transportation Systems, 2015: 284-296. DOI: 10.1109/TITS.2014.2331758.
[14]TU Enmei, ZHANG Guanghao, RACHMAWATI L, et al. Exploiting AIS data for intelligent maritime navigation: a comprehensive survey from data to methodology[J]. IEEE Transactions on Intelligent Transportation Systems, 2018, 19(5): 1559-1582. DOI: 10.1109/TITS.2017.2724551.
(編辑 赵勉)
猜你喜欢
计算机应用(2016年12期)2017-01-13
物联网技术(2016年11期)2017-01-12
中国管理信息化(2016年21期)2016-12-27
现代商贸工业(2016年14期)2016-12-27
科技创新与应用(2016年34期)2016-12-23
电子技术与软件工程(2016年20期)2016-12-21
数字技术与应用(2016年9期)2016-11-09
科学与财富(2016年28期)2016-10-14
中国市场(2016年23期)2016-07-05
