移相全桥ZVS直流变换器技术研究
2020-04-27 10:10:50杨香兵查文琦
舰船电子对抗 2020年1期
张 帅,杨香兵,查文琦
(中国船舶重工集团公司第七二四研究所,江苏 南京 211106)
0 引 言
现代相控阵雷达、固态发射机的380 V三相交流电源组件,基本上全部用于为功放或TR组件提供电能。电源组件由三相功率因数校正(PFC)模块和DC/DC模块两级组成。DC/DC模块将前级PFC输出的高压直流电转化为低压直流电,供给TR组件等使用。相控阵雷达功率的提高,体积的限制,对DC/DC模块的并联使用、功率密度等方面也提出了要求。
1 工作原理
1.1 全桥变换器控制策略
相控阵和固态发射机电源组件中,DC/DC电源模块主要是把前级三相PFC整流输出的数百伏直流电压转换成隔离的低压直流电。DC/DC变换器的拓扑结构很多,比如Buck、Boost、Flyback、Forward等[1],这些变换器有各自的应用功率等级。针对相控阵雷达的工作特点,在中大功率场合,一般采用全桥变换器。而为了实现高效和高可靠性,普遍采用零电压开关(ZVS)技术。全桥变换器控制方式主要有:双极性控制(硬开关)、移相控制、下管调制法和有限双极性控制。目前芯片厂商较多使用的是移相控制和下管调制法。
本文采用移相控制零电压软开关技术,使用TI公司UCC2895作为控制芯片。移相控制法4个开关管均使用50%占空比,同一桥臂的驱动电压互补,相位相差180°,而超前桥臂和滞后桥臂相差1个相位角。通过调节该角度大小来调节输出电压。
1.2 移相全桥ZVS DC/DC变换器
图1为移相全桥拓扑的电路图[2],其中Q1~Q4是4个开关管,D1~D4为4个开关管的寄生二极管,C1~C4为4个开关管的寄生电容或者外部电容,Lr为谐振电感,为变压器漏感与外接电感之和,T为功率变压器,Lf与Co为输出滤波电感和电容,DR1、DR2为变压器副边的整流二极管。
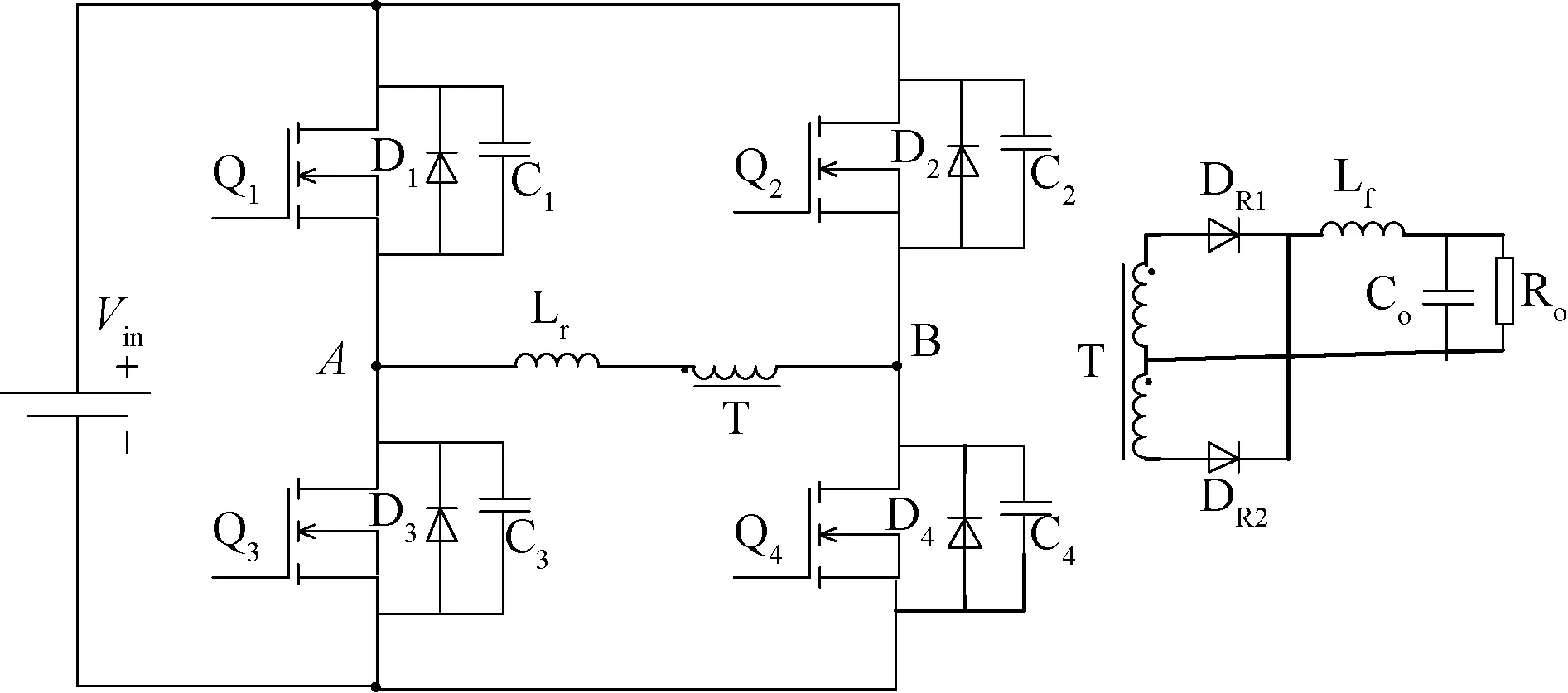
图1 移相全桥拓扑电路图
移相全桥中同一桥臂的2个开关管以180°互补导通,Q1和Q3分别超前于Q2和Q4,则 Q1和Q3为超前臂,Q2和Q4为滞后臂,如图2所示。

图2 移相控制
图3为移相全桥ZVS变换器的主要波形。
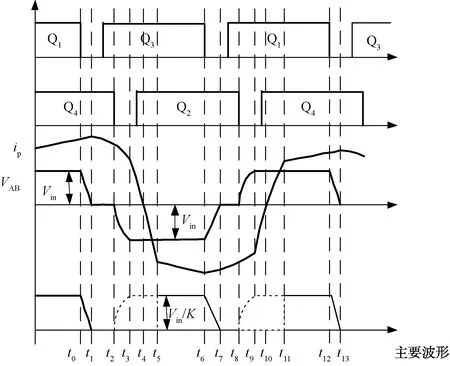
图3 移相全桥ZVS变换器主要波形
2 DC/DC电源模块设计
2.1 设计指标
针对相控阵雷达和固态发射机对直流变换电源的使用需求,提出了对DC/DC电源模块的设计指标,如表1所示。
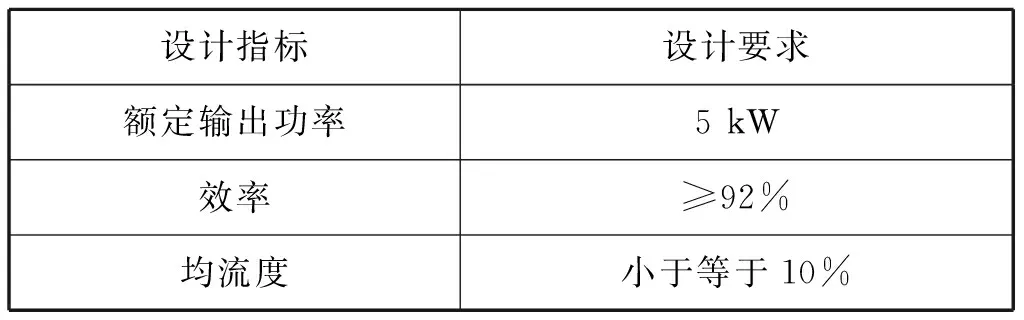
表1 DC/DC电源模块设计指标
2.2 器件选型及参数设计
DC/DC电源模块设计框图如图1所示,主功率电路采用移相全桥拓扑,其中的关键元器件:谐振电感Lr、变压器T、功率开关管Q1~Q4、输出滤波电容Co,输出滤波电感Lf,需要根据功率等级及性能指标进行设计选型。
2.2.1 变压器设计
由于输出电流及功率较大,采用原边2个变压器串联、副边并联的形式。为了减少磁性元器件体积,设计工作频率为100 kHz,变压器材料选用软磁铁氧体。
根据前级PFC模块输出360~420 V(DC),考虑到占空比丢失,额定负载时,选择副边最大占空比Dmax=0.85,则变压器副边最低电压为:
(1)
式中:Vo为输出电压最低值;Vr为变压器副边绕组内阻电压降及线压降;VD为导通二极管压降。
可得原副边匝比为n=Np/NS=Vinmin/Vsmin,经计算,取n=3,再根据AP法[3]计算并选择合适的磁性和原副边具体匝数。
2.2.2 整流二极管选择
输入电压最大值为420 V,匝比为3,则副边电压应力为70 V,电流应力为60 A,频率为200 kHz,应选择快恢复二极管。综合以上参数,选择IXYS公司的DSEI2X101-06 A。主要电气参数如表2所示。
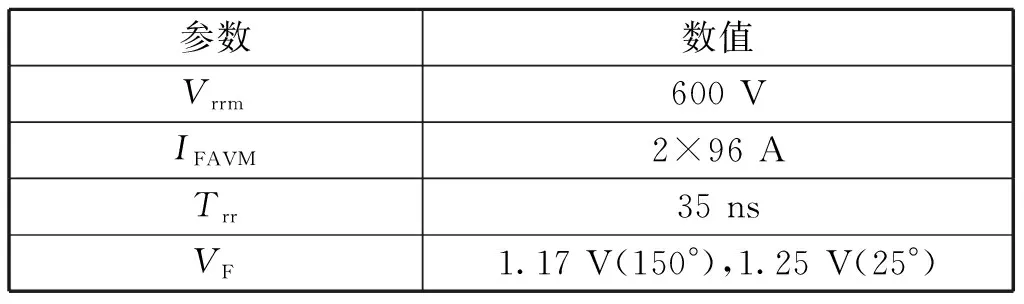
表2 整流二极管电气参数
2.2.3 开关管选择
根据输入输出参数,假定效率为0.92,则其输入功率为Pin=Pout/η=5.435 kW,根据前级PFC输出电压即DC/DC电源模块360 V~420 V,可得:Iin=Pin/Vin=12.9~15.1 A。
为了减少无源器件的重量,开关频率选择为100 kHz,则开关管为MOSFET,考虑到器件裕量,选择器件IXFH60N65X2作为开关管。主要电气参数如表3所示。

表3 开关管电气参数
2.2.4 输出LC参数
输出LC电路和BUCK电路相似。带阻性负载下,输出滤波电感可按如下公式计算:
(2)
式中:VLF为电感压降;VF为二极管压降。
输出电容可按如下公式计算:
(3)
式中:ΔUC为纹波值。
如果带脉冲负载,瞬间输出电流较大,电容Co还起到储能作用,根据公式:
(4)
计算出电容值,其中Imax为最大脉冲电流;Tmax为最大脉冲宽度;U为输出电压;U1为脉冲时允许下降到的输出电压。
2.3 并联均流电路设计
开关电源的标准化、模块化、并联运行是雷达电源系统的发展趋势。并联运行使得在标准化、模块化后大电流输出成为可能,同时也增加了整个电源系统的灵活性和冗余。采用多个模块并联时,由于每个模块输出电压不能保持完全一致,输出阻抗也会有所差别。若直接将模块并在一起,由于输出电压相同,输出电流就存在差异。输出电流小的电压,效率较低;输出电流过大的电源,使用寿命减少。
因此,并联的电源模块均流输出是电源并联运行中非常重要的问题。
通过外加的均流电路,使得模块之间输出电压一致,通过调整电压来控制输出电流。常用的方法有下垂法、主从控制法、平均电流法、最大电流法。图4所示为DC/DC电源模块采用的峰值电流均流电路。其中Vf与电压环输入端相连,Iout为输出电流采样,Ishare为均流母线,Vcc为供电电压。
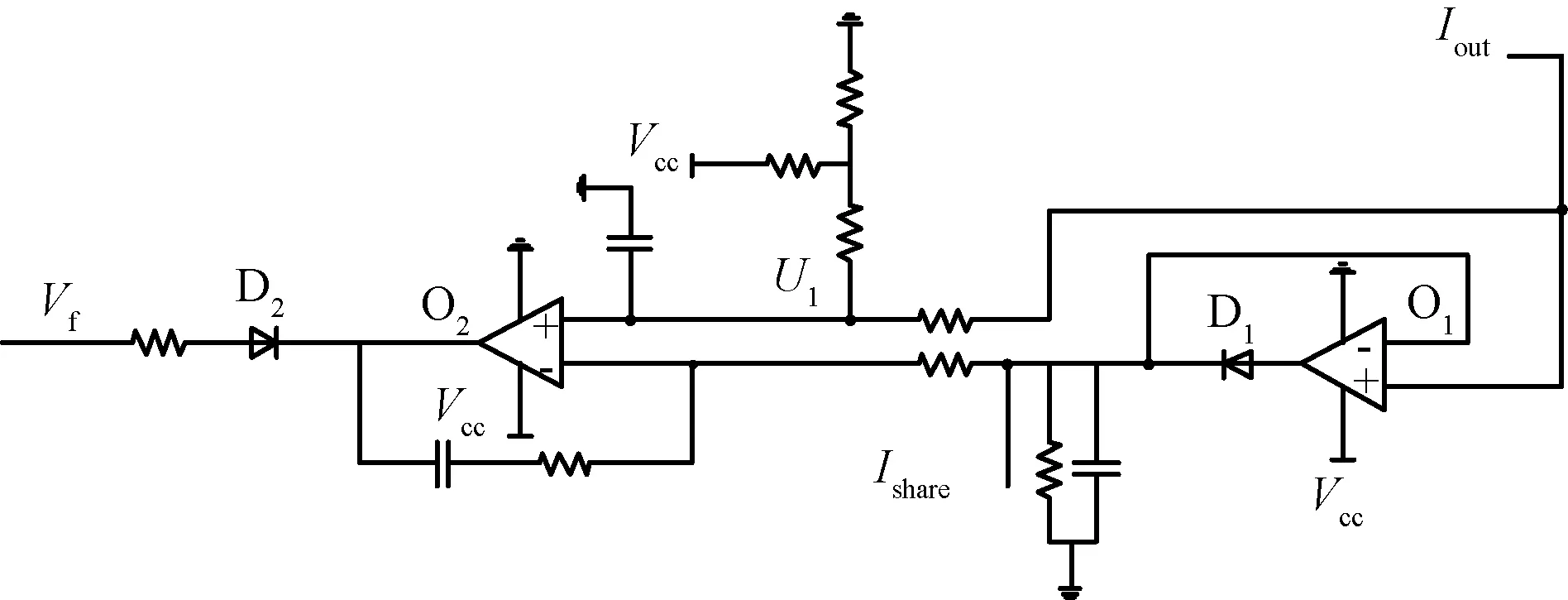
图4 并联均流电路
假设有N个模块并联,模块输出电流分别对应一个电压,则均流母线上体现的是模块输出电流最大模块对应的电压Vx。这个模块称为主模块,由电路图可看出,电路会调整所有模块输出电流向主模块对应的电流靠近,但是由于均流母线电压与主模块电流对应电压相差1个二极管D1的压降,因而从模块输出电流只能紧跟主模块,而不超过主模块。当单个模块工作时,外部给定的基准电压U1保证O1输出高电平,结合二级管D2,均流电路此时不工作。
3 实验结果
3.1 驱动波形及分析
图5为4个开关管的驱动电压波形。图中1、2为超前桥臂上下管Q1、Q3的驱动电压波形,3、4为滞后桥臂上下管Q2、Q4的驱动电压波形。可以看到上下管互补导通,且有一定的死区时间,避免了直通。
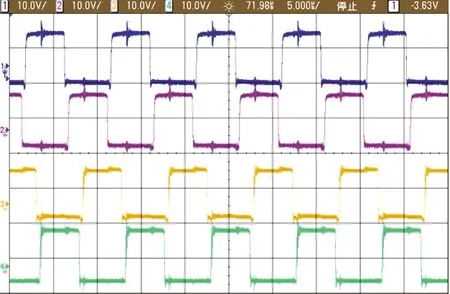
图5 四路驱动电压波形
3.2 主电路测试波形及分析
超前桥臂下管Q3、滞后桥臂下管Q4的驱动波形和对应的GS电压波形如图6所示。例如,在开关管Q3的驱动信号开通时,由于其体二极管的箝位作用,Q3两端的电压已经降到并被箝在零位,此时开关管Q3零电压开通。同理,Q3也是零电压关断。ZVS减小了开关管开关时电压和电流的重叠部分,减小了电压和电流尖峰,具有很小的损耗。

图6 下管驱动波形和对应的电压波形
桥中点AB间的电压波形如图7所示。由图中可看出VAB最大值为输入电压,实验波形与图3中的理论分析波形相似。
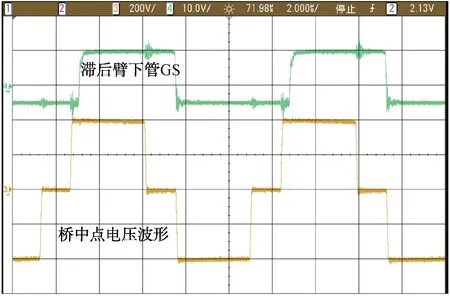
图7 滞后臂下管驱动和桥中点电压波形
3.3 并联均流测试
为了测试并联均流情况,将2个相同的DC/DC电源模块进行并联。通过电流探头测得2个模块输出电流的波形如图8所示。由图中可看出,在总电流100 A时,一路模块输出电流平均值为48.52 A,另一路为50.52 A,均流度为2%。

图8 两模块均流实验输出电流波形
使用电流钳表测试了轻载至重载条件下2台电源的均流数据,如表4所示。其中NO.1、NO.2分别为2台电源并联时的输出电流值。由表4可知,均流度小于10%,均流情况良好。
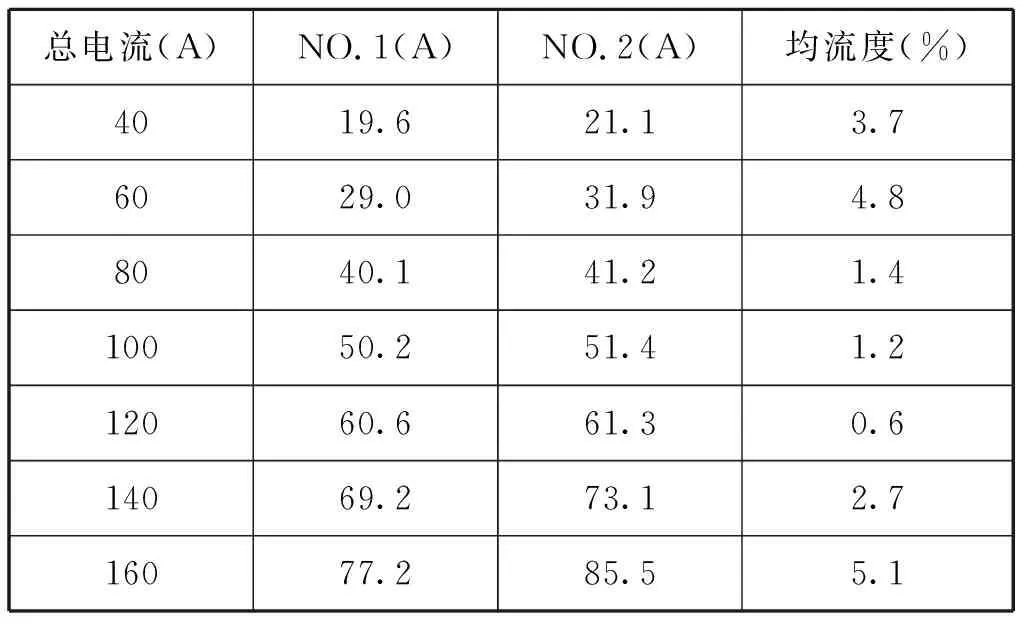
表4 均流度测试
3.4 上机实验
为验证所研电源在雷达系统中的适用性,在某型固态雷达发射机中进行了上机实验。
图9为固态发射机10%占空比静态工作、电流有效值35 A下的实验波形。其中1通道为输出电压交流值,4通道为输出电流波形。
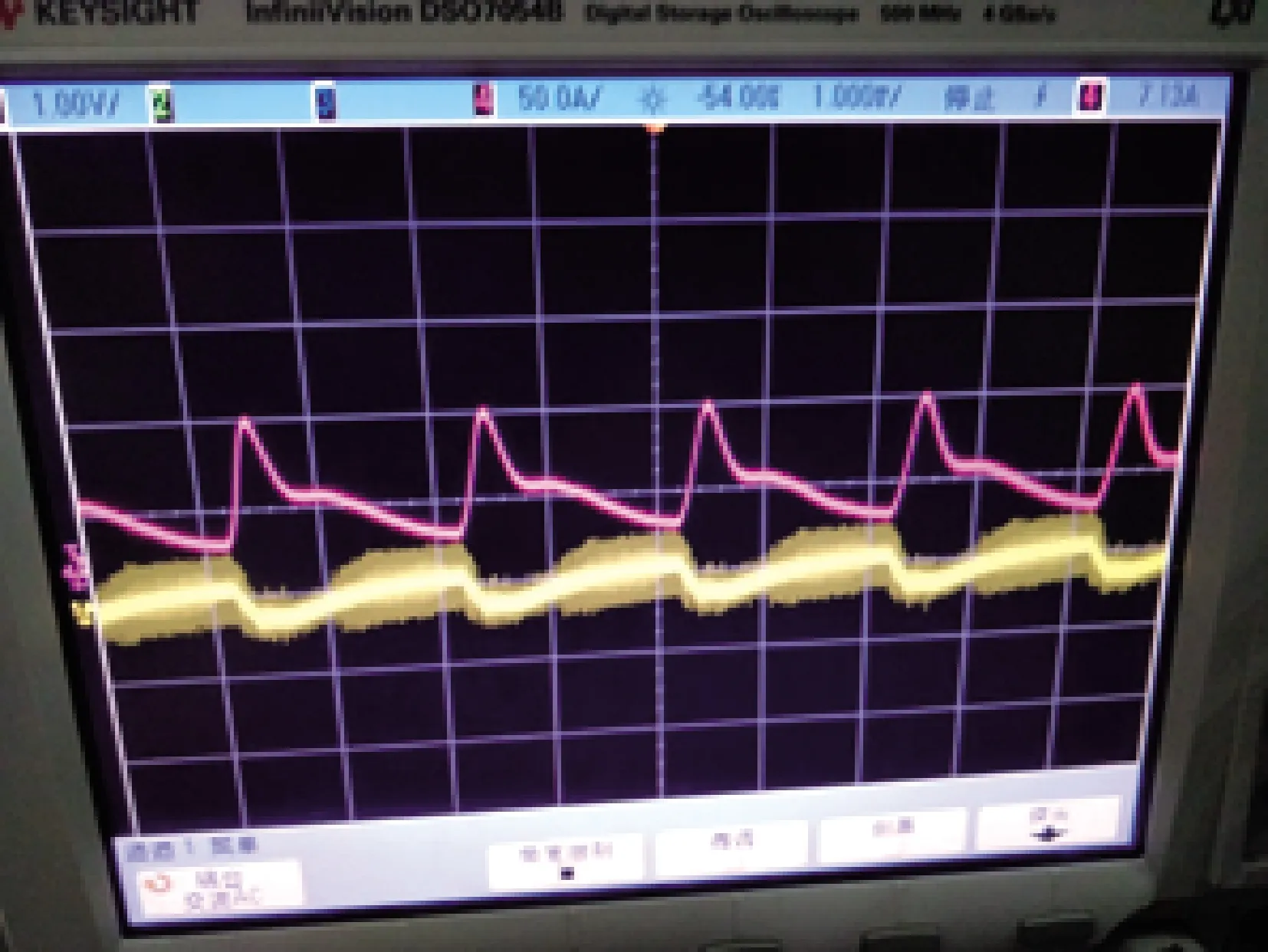
图9 静态下10%占空比
图10为固态发射机15%占空比工作状态、电流有效值88.4 A下的实验波形。峰值电流接近190 A。
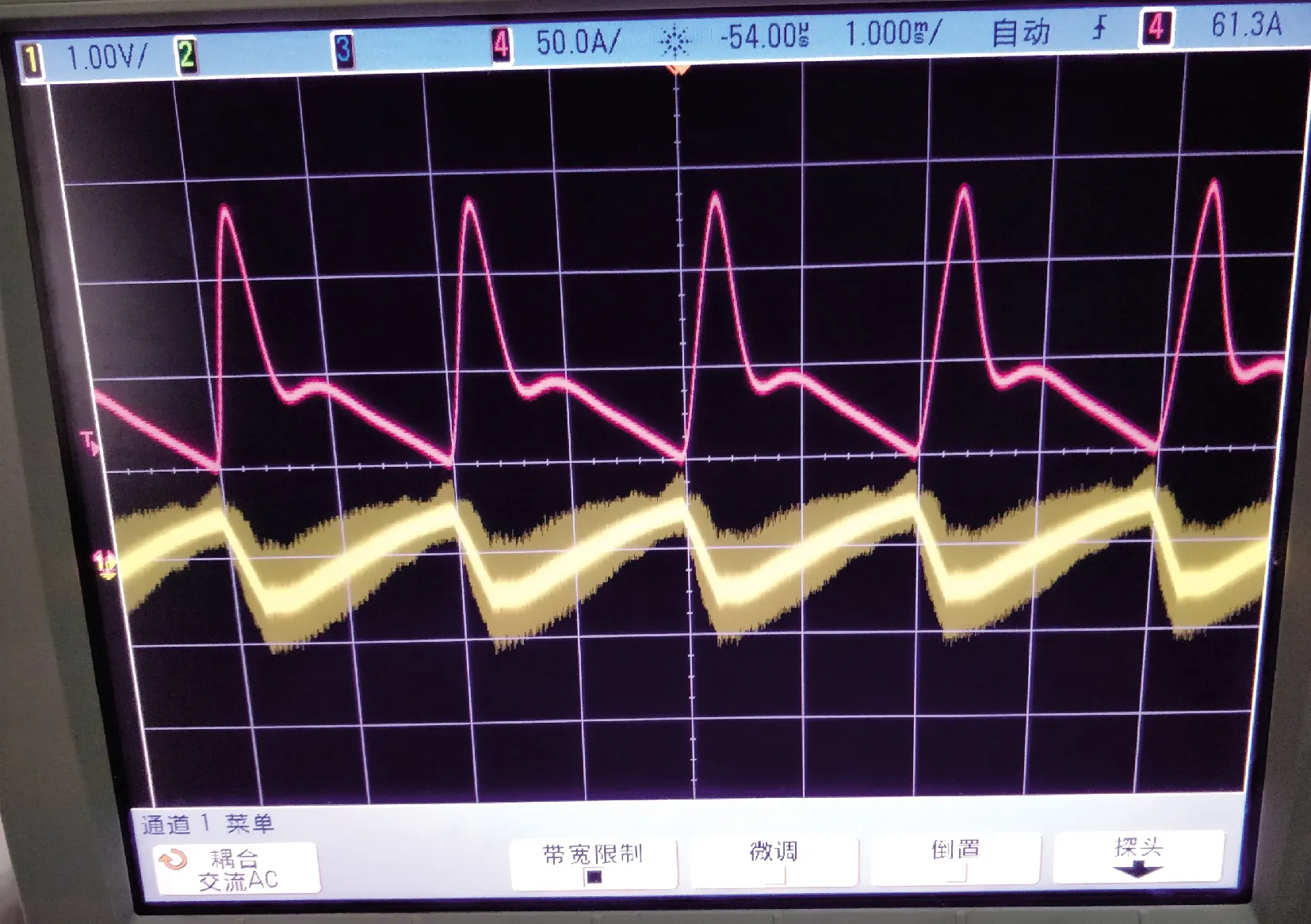
图10 工作状态15%占空比
实验波形符合理论分析,通过电流钳表测得2台电源并联均流度良好。
4 结束语
本文针对相控阵雷达TR组件和固态发射机末级功放组件对大功率、可并联电源组件的需求,研究了移相全桥拓扑的工作原理,给出了电路主要元器件的计算选型,设计出了并联均流电路。研制了2台额定输入直流400 V、额定输出电压38 V、功率5 kW的实验样机,额定条件下效率为92.5%,并联均流情况优异,上机实验效果良好,为开关电源在大功率相控阵雷达和固态发射机中的批量运用提供了技术支持。
猜你喜欢
电子测试(2022年3期)2023-01-14 18:06:36
通信电源技术(2018年5期)2018-08-23 01:15:38
通信电源技术(2018年3期)2018-06-26 08:05:42
电子测试(2018年4期)2018-05-09 07:27:53
制造技术与机床(2017年8期)2017-11-27 02:10:24
电测与仪表(2016年4期)2016-04-11 09:48:06
通信电源技术(2016年5期)2016-03-22 01:09:41
铁道科学与工程学报(2015年4期)2015-12-24 12:11:25
电测与仪表(2015年23期)2015-04-15 00:31:22
电子设计工程(2015年3期)2015-02-27 12:03:53