高速搜索雷达伺服系统设计
2020-04-26 01:33杨国文靳磊赵冲夏旭光
科技创新与应用 2020年11期
关键词:伺服系统
杨国文 靳磊 赵冲 夏旭光


摘 要:针对现有高速搜索雷达伺服系统存在角度反馈精度差、数据率低、运动响应速度慢等问题,设计了一种基于DSP控制的伺服系统。通过对整个雷达系统力矩特性的详细分析,从工程应用角度计算出系统详细力矩数值,选用高速率绝对值光电编码器作为角度反馈传感器,同时优化伺服系统电磁兼容性设计性能。实际测试结果表明该伺服系统定位精度达到0.01°,角度反馈数据率达到10kHz,速度范围为0.05°/s~180°/s,速度精度达到±5%,最高加速度达60°/s2,满足高速搜索雷达的相关应用要求。
关键词:伺服系统;搜索雷达;伺服控制;DSP
中图分类号:TP273 文献标志码:A 文章编号:2095-2945(2020)11-0106-04
Abstract: For the existing high-speed search radar servo systems have disadvantages such as poor angular feedback accuracy, low data rate, and slow motion response speed,this paper designs a servo control system based on DSP. The torque characteristics of the entire radar system are analyzed in detail, and the detailed torque values of the system are calculated from the perspective of engineering applications, use high-speed absolute value photoelectric encoder as angle feedback sensor, optimize the electromagnetic compatibility design performance of the servo system. The actual test results show that the positioning accuracy of the servo system is 0.01°, the angle feedback data rate is 10kHz, the speed range is 0.05°/s~180°/s, the speed accuracy is ±5%, and the maximum acceleration is 60°/s2, meet the relevant application requirements of high-speed search radar.
Keywords: servo system; search radar; servo control; DSP
高速搜索雷達伺服系统是通过控制电机来驱动雷达天线运动,从而实现雷达天线圆周搜索、扇形搜索和定点指向等功能,并同时给出雷达天线实时角度[1-3]。以往的设计中,因为受制于电路设计和角度传感器的性能,在实时角度获取和上报的过程中存在较大的延时,导致高速搜索雷达在搜索目标时位置精度低,目标定位误差较大;同时由于伺服转台转动速度精度和定位精度较差,大大降低了搜索雷达的系统精度,特别是针对低小慢无人机目标。本设计在选择高速率光电编码器的基础上,优化伺服转台机构设计,采用性能优良的控制电路设计和软件设计,对以往的搜索雷达伺服转台进行改进。
1 系统组成
系统由雷达伺服转台结构、角度传感器、汇流环、滤波器、控制电路、插头插座和其它电气器件组成,其中伺服电控部分主要由电源电路、功率驱动电路和DSP控制电路组成。系统组成框图如图1所示[4-5]。
2 系统设计与实现
2.1 系统负载力矩特性分析
对于整个伺服系统而言,负载力矩特性分析可以从工程角度估算出电机力矩,便于电机选择,也有助于系统整体结构设计。系统负载力矩特性分析主要包含风力矩、惯性力矩、不平衡力矩以及摩擦力矩等[6-9]。
2.1.1 风力矩Mw估算
该搜索系统雷达天线外观为标准平板型天线,方位转动轴为中央支撑设计,质心和型心重合并位于方位转动轴上。风力矩包含静风力矩MW1和动风力矩MW2,静风力矩计算公式为:
动风力矩的计算公式为:
式中,CM为风力矩系数,A为迎风面积,表示天线在风向的投影面积,假设雷达天线长宽厚为a×b×c,估算最大风力矩可按天线最大迎风面为a×■计算;D为特征距离,值可取b;ρ为空气质量密度,在标准大气压下,温度15℃时,空气密度ρ取值为1.25kg/m3;V为风速,六级风速为13.8m/s;ω:天线转动角速度。由此可得出最大风力矩Mw为:
Mw=Mw1+Mw2≈5.38N.m (3)
2.1.2 惯性力矩MJ估算
雷达天线在转动过程中,特别是在扇形扫描模式下,存在较大加减速过程,这就要求系统在较短时间内需要克服较大的惯性力矩。惯性力矩MJ的计算公式如下:
MJ=JL?着≈2.09N.m (4)
式中JL为负载最大转动惯量,按照外形可以计算出雷达天线转动惯量为:
ε为负载最大调转加速度。
2.1.3 不平衡力矩MP估算
雷达天线在转动过程中,特别是俯仰状态变化时,负载质心位置是不断变化的,伺服系统为了保证运行的稳定性需要克服这种因质心位置变化引起的不平衡力矩。不平衡力矩的估算公式为:
MP=G(?驻lmax)≈6N.m (6)
式中G为雷达天线负载质量,?驻lmax为雷达天线在转动时其质心与方位转动轴偏心的最大距离。
2.1.4 摩擦力矩MF估算
该系统方位转动时,会存在一定的摩擦力矩阻碍转台转动。方位转动时的主要摩擦力矩包括方位轴承摩擦力矩Mf、动密封橡胶圈摩擦力矩Md和汇流环摩擦力矩Mi。方位轴承摩擦力矩Mf为:
式中,f为轴承摩擦系数;F为轴承承受载荷力;d为轴承直径。方位动密封橡胶圈摩擦力矩Md为:
式中,f为材料摩擦系数;d为动密封橡胶圈旋转轴径;P为密封圈材料对轴的比压;L为密封圈轴向接触长度。汇流环摩擦力矩Mi实际测试值一般都小于0.1N.m。由以上估算可得系统方位摩擦力矩MF为:
MF=Mf+Md+Mi≈1.35N.m (9)
2.1.5 力矩综合
根据工程需求,为保证系统在预定条件的安全、可靠、高精度地工作,负载力矩最大值ML应满足:
ML≥MW+MJ+MP+MF≈14.82N.m(10)
综合力矩是伺服系统工作在极限环境下所需要的力矩,系统一般工作在低力矩状态。
2.2 系统主要器件的选取
2.2.1 电机选型
直流力矩电机可以为本系统的定位和速度控制提供低转速、高扭矩、高响应速度;可以采用无需连接减速器,与方位轴直接同轴连接的传动方式,因此可以提供较高的控制精度和响应度。本伺服系统选择的电机参数如表1所示[9-11]。
在实际应用中,直流力矩电机可以运行在堵转状态,在选择直流力矩电机时其最大堵转力矩MP应满足:
MP≥1.5ML≈22.23N.m (11)
高速搜索雷达经常会工作在扇形扫描和360°扫描状态下,在此状态下,直流力矩电机经常处于反接制动过程中,这就要求选择的直流力矩电机在大速度调转时最大堵转力矩MP在满足式(11)的同时也要满足:
式中,Umax为反接制动时电机最大电压值,本系统中为系统供电最高电压值,Ke为电机反电动势系数,ω为电机最大速度,Km为力矩系数,Ra为电机回路总电阻。按照计算结果可以看出所选电机完全符合使用要求。
2.2.2 角度传感器选型
本系统指标要求方位测角精度≥0.03°,而对于工程应用而言,一般测角精度可以控制在编码器±1个分辨率,在此取编码器分辨率为方位测角精度的1/4为0.0075°,可以算出编码器一周数据为48000,因此可选择一款16位的编码器。编码器有增量式编码器和绝对式编码器,为了使用方便,减少初始化过程,可以选择绝对式编码器。在本系统要求伺服上报数据刷新率≥10kHz,因此需要选择高速数据率编码器,其硬件接口可选择RS422,为保证传输实时性,要求波特率为1382400bps,这就要求后端数字处理单元配备此波特率[12-13]。
2.2.3 汇流环选型
本系统中需要过汇流环的包括雷达电源24V/30A、调试全双工RS422串口1路、雷达伺服通信全双工RS422串口1路、方位角度数据发送R422串口1路、百兆网2路、伺服状态信号1路,汇流环每根导线可过2A的电流,共需要汇流环导线数为52路,可选择标准为56路的汇流环,其余导线预留备用。
2.3 系统控制环路设计
本系统控制组成框图如图2所示[14-16],伺服控制采取电流环、速度环、位置环三环控制。复合环路伺服控制系统具有较高的定位精度、较好的调速性能和较强的抗负载扰动能力。
电流环为速度环的内环,速度环为位置环的内环。电流环为比例控制,通过霍尔电流传感器获取电机电流进行电流闭环;速度环为比例积分控制,通过测速机获取电机转速进行速度闭环;位置环为比例积分控制,通过绝对式编码器获取负载角度信息进行位置闭环。DSP控制模块负责位置闭环、接收编码器数据,同时与雷达进行数据通信和伺服系统状态监测。
伺服控制器电路如图3所示,伺服系统控制芯片采用美国德州仪器公司(TexasInstrument,TI)C2000芯片TMS320F28335为主控芯片,同时配合其他外围电路构成伺服控制器。产生3.3V和1.9V电压模块为TI公司的TPS75833和TPS78601;RAM芯片采用Integrated Silicon Solution公司的IS61LV25616AL芯片,RAM芯片用于實时仿真;EEPROM采用ATMEL公司的AT28LV010芯片,EEPROM的用于记录数据、标记零点等;DAC采用亚诺半导体公司(AnalogDevices,AD)的AD7836芯片,此芯片为4通道输出14位DAC,用于给定速度电压;DAC 的参考电压芯片为AD公司的AD588;串口芯片采用美信半导体公司(MaximIntegrated, MAXIM)的MAX3491,用于和雷达、编码器进行RS422串口通信;所有逻辑控制的IO信号均经过光耦隔离芯片隔离,用于保护控制器以及电磁兼容化设计。
3 系统控制软件设计
伺服系统控制软件是基于TI公司CCS开发环境设计开发的,采用模块化设计,控制软件主程序处理整个系统的所有工作任务;中断处理编码器数据和上位机命令,包含编码器数据接收、雷达命令接收、伺服数据和状态上报等;子程序分别处理扇扫、周扫和定点等实际功能;整个控制软件流程如图4所示,系统上电后初始化各个模块,初始化后进行系统自检。自检过程中如果子部件故障,系统将关闭驱动,同时上报故障。如果初始化后自检成功,系统等待雷达控制命令,在接收雷达命令后判断命令与参数的合理性,若命令或参数不合理,系统则不执行并保持上一个工作状态;若命令和参数合理,系统将执行相应程序;系统定时上报伺服角度信息和状态信息[17]。
4 系统电磁兼容设计
雷达搜索伺服系统是电磁信号极为复杂的系统,在工作时电机、测速机和其他电子器件之间会产生各种电磁干扰和感应,这些不利的干扰极有可能干扰系统特别是控制电路的工作,所以在系统设计时应充分考虑系统的电磁兼容性。从工程应用考虑,系统的电磁兼容设计一般从下面几个方面进行设计:
4.1 屏蔽与隔离
对干扰源、易被干扰信号导线、伺服控制电路板做屏蔽处理;对高压与低压、强电与弱电、模拟信号与数字信号、交流电与直流电、电机电源与电路电源分别做隔离处理。
4.2 滤波和接地
对伺服系统电源输入端做直流滤波器滤波处理;对功率驱动器驱动电源做无感滤波处理;对高频信号做数字滤波处理;数字地与模拟地分离总电源地。
5 测试结果及结论
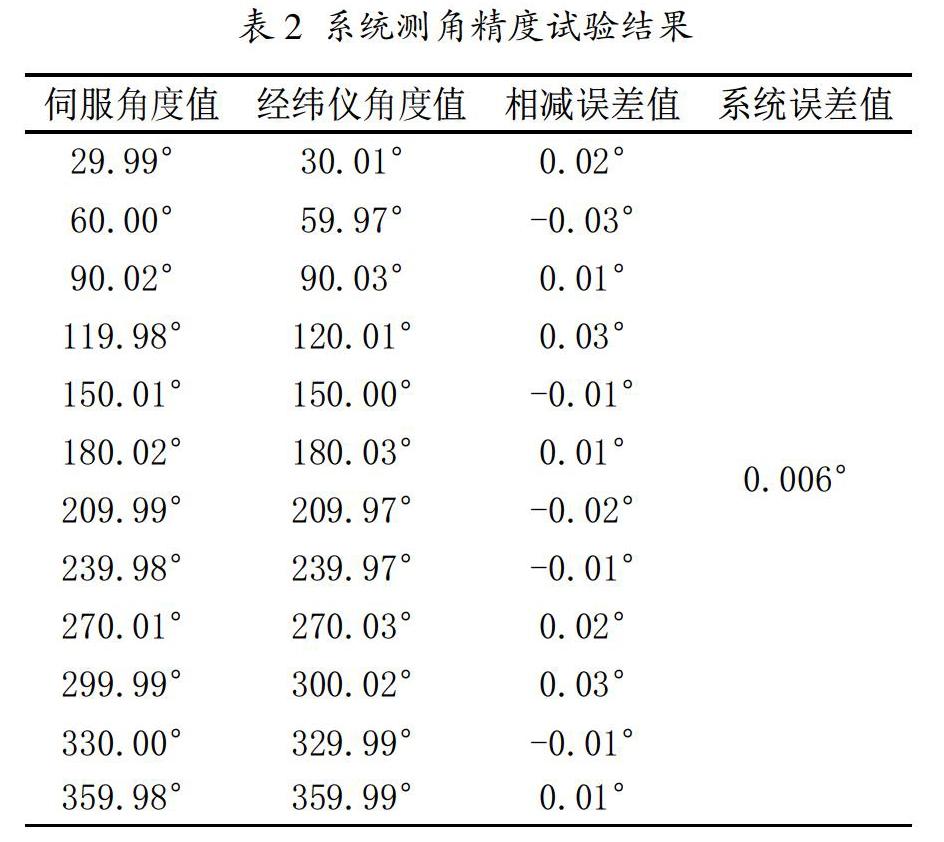
安装负载后对设计的伺服系统进行实际测试,测试内容主要包括系统测角精度、速度范围、最大加速度、角度刷新率等。系统测角精度通过使用高精度经纬仪与伺服实际角度值标校的方法来确定,每隔30°标校一次,每一次记录经纬仪角度值和伺服角度值,将两值做差求出当前角度误差值,依次计算出12个误差值,最后对12个误差值求均方根误差,此误差为伺服系统精度值,测量的结果如表2所示。
通过记录上位机接收伺服实时反馈的角度值并对其进行微分处理可以解算出伺服转动时的实际速度,通过上位机控制伺服系统分别按照30°/s、60°/s、90°/s、120°/s、150°/s、180°/s运动,待伺服运动稳定时记录此时的角度信息并做分析,分析后的速度数值通过Matlab作图可以测试系统速度稳定度,测试结果如图5所示,横坐标为时间线,纵坐标为速度值,从图中和数据分析可知,系统可以达到180°/s的应用要求,且各个速度曲线波动较小,均小于±5%。
系统最后的测试结果如表3所示,测试的结果表明,设计的转台具有较高的速度范围,可以适用于多种工作模式,既可以工作在高速状态也可以兼顾低速目标跟踪状态;该转台具有较高的加速度,可以为雷达系统提供较高的响应度;定位精度优于当前主流搜索雷达伺服转台;角度数据上报刷新率为10kHz,特别适用于搜索低慢小无人机目标。
根据本文设计,研制出的高速雷达搜索伺服转台3套,经过实际外场试验,该伺服系统工作稳定可靠,性能良好,完全符合设计指标,很好地验证了伺服设计与工程应用中的估值问题,对同类伺服产品工程设计与生产提供了借鉴依据。
参考文献:
[1]张晨,毛征,杨俊强,等.对搜索雷达不等间隔采样问题的分析[J].兵工自动化,2018,37(9):15-23.
[2]宋伟,娄亮.海面多路径效应雷达探测性能的影响分析[J].计算机测量与控制,2018,26(6):110-125.
[3]宋玲,蔡祥宝.雷达主机与雷达伺服通信接口设计[J].计算机技术与发展,2017,27(9):197-200.
[4]高国华,汪进.某伺服跟踪转台结构设计与模态分析[J].机械设计,2018,35(1):151-154.
[5]章百宝,陈涛.某卫星通信天线伺服系统的设计与实现[J].现代电子技术,2015,38(1):59-65.
[6]李刚,郭锐,严康,等.一种天线回转轴静态风力矩分析方法[J].雷达与对抗,2017,37(3):52-64.
[7]乔山林,顾吉丰.风载荷对雷达天线的影响与评估[J].现代雷达,2017,39(10):95-99.
[8]周丽阳.某舰载火控雷达风载荷仿真计算[J].电子机械工程,2019,35(2):34-37.
[9]严荣军,李维天.一种简易的单兵雷达结构受力分析[J].舰船电子工程,2017,37(8):157-161.
[10]张修文,王磊,冯同,等.多余度电机伺服系统可靠性研究[J].微电机,2017,50(8):28-33.
[11]劉兴中,张显亭,魏旭来.基于FPGA的无刷力矩电机伺服控制系统研究[J].电机与控制应用,2017,44(6):51-56.
[12]唐翔,南林,张少博.一种高精度磁编码器在电动伺服系统中的应用[J].工业控制计算机,2017,30(11):28-29.
[13]王海明,李国艳,杨琳,等.基于F28335的绝对值编码器的电机角度和转速测量[J].微电机,2017,48(12):55-59.
[14]刘胜,刘江华.基于搜索者优先算法的伺服系统PID控制器设计[J].控制工程,2017,24(11):2189-2194.
[15]陈广浩,吴开源,曾敏.基于模糊-PI双模控制的两相伺服电动机速度控制系统[J].电子设计工程,2017,25(14):78-85.
[16]李斯宇,赵志涛,赵志诚.伺服系统直流调速系统的改进型内模PD-I控制方法[J].火力与控制指挥,2017,42(7):90-93.
[17]杨洋,赵春璋.基于ARM与FPGA的伺服控制电路设计[J].电子测量技术,2017,40(7):16-25.
猜你喜欢
科技与创新(2015年19期)2015-10-14
现代电子技术(2015年15期)2015-08-14
科技与创新(2015年12期)2015-07-21